3DR Pixhawk 1 Flight Controller (знято з виробництва)
WARNING
Цей політний контролер був знятий з виробництва і більше не продається комерційно. Ви можете використовувати mRo Pixhawk як заміну.
WARNING
PX4 не виробляє цей (або будь-який) автопілот. Звертайтесь до виробника з питань щодо підтримки або відповідності.
Автопілот 3DR Pixhawk® 1 є популярним універсальним політним контролером на основі відкритого апаратного дизайну Pixhawk-project FMUv2 (він поєднує функціональність PX4FMU + PX4IO). Він виконує PX4 на ОС NuttX.

Інструкції зі збирання/налаштування для використання з PX4 наведено тут: Швидкий старт з підключення Pixhawk
Основні характеристики
- Основна System-on-Chip: STM32F427
- CPU: 180 MHz ARM® Cortex® M4 з одинарною точністю FPU
- RAM: 256 KB SRAM (L1)
- Failsafe System-on-Chip: STM32F100
- CPU: 24 MHz ARM Cortex M3
- RAM: 8 KB SRAM
- Wifi: ESP8266 зовнішній
- GPS: u-blox® 7/8 (Hobbyking®) / u-blox 6 (3D Robotics)
- Оптичний потік: PX4 Flow unit
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - мультиколірний світлодіод
- Потужний мультитональний п'єзозвуковий індикатор
- microSD карта для високошвидкісного логування даних протягом тривалого періоду
Підключення
- 1x I2C
- 1x CAN (2x опційно)
- 1x ADC
- 4x UART (2x з контролем потоку)
- 1x Консоль
- 8x PWM з ручним перевизначенням
- 6x PWM / GPIO / PWM вхід
- S.BUS / PPM / Spektrum вхід
- S.BUS вивід
Де придбати
Ця плата, що оригінально вироблялася компанією 3DR®, була стандартною платформою мікроконтролера для PX4®. Так, як плата більше не виробляється 3DR, ви можете використовувати mRo Pixhawk як заміну.
Замовте mRo Pixhawk з:
- Bare Bones - просто плата (корисна як заміна 3DR Pixhawk)
- mRo Pixhawk 2.4.6 Essential Kit - включає все, крім телеметрії радіо
- mRo Pixhawk 2.4.6 Cool Kit! (Limited edition) - включає все необхідне, включаючи телеметрію радіо
Характеристики
Процесор
- 32bit STM32F427 Cortex-M4F ядро з FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32 bit STM32F103 відмовостійкий копроцесор
Датчики
- ST Micro L3GD20H 16 bit гіроскоп
- ST Micro LSM303D 14 bit акселерометр / магнітометр
- Invensense MPU 6000 3-вісний акселерометр/гіроскоп
- MEAS MS5611 барометр
Інтерфейси
- 5x UART (послідовні порти), один високої потужності, 2x з HW контролем потоку
- 2x CAN (один з внутрішнім 3.3V трансивером, один на конекторі розширення)
- Spektrum DSM / DSM2 / DSM-X® Satellite сумісний вхід
- Futaba S.BUS® сумісний вхід і вивід
- PPM sum signal вхід
- RSSI (PWM чи voltage) вхід
- I2C
- SPI
- 3.3 та 6.6V ADC входи
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
Система живлення та захист
- Ідеальний діодний контролер з автоматичним перемиканням
- Сервопривід високої потужності (max. 10V) і сильного струму (10A+)
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
Номінальна напруга
Pixhawk може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини: вхід модуля живлення, вхід сервоприводу, вхід USB.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи
- Вхід модуля живлення (4.8V to 5.4V)
- Вхід сервоприводу (4.8V to 5.4V) ДО 10V ДЛЯ РУЧНОГО ПЕРЕКЛЮЧЕННЯ, АЛЕ АВТОПІЛОТ БУДЕ ЗНЕЖИВЛЕНИЙ ВИЩЕ 5.7V, ЯКЩО ВХІД МОДУЛЯ ЖИВЛЕННЯ НЕ ПРИСУТНІЙ
- Вхід живлення USB (4.8V до 5.4V)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- Вхід модуля живлення (4.1V до 5.7V, 0V до 20V неушкоджений)
- Вхід сервоприводу (4.1V до 5.7V, 0V до 20V)
- Вхід живлення USB (4.1V до 5.7V, 0V до 6V)
Схеми
Схема FMUv2 + IOv2 -- Схема та макет
Як дизайн Open Hardware з ліцензією CC-BY-SA 3.0, всі схеми та файли дизайну доступні тут.
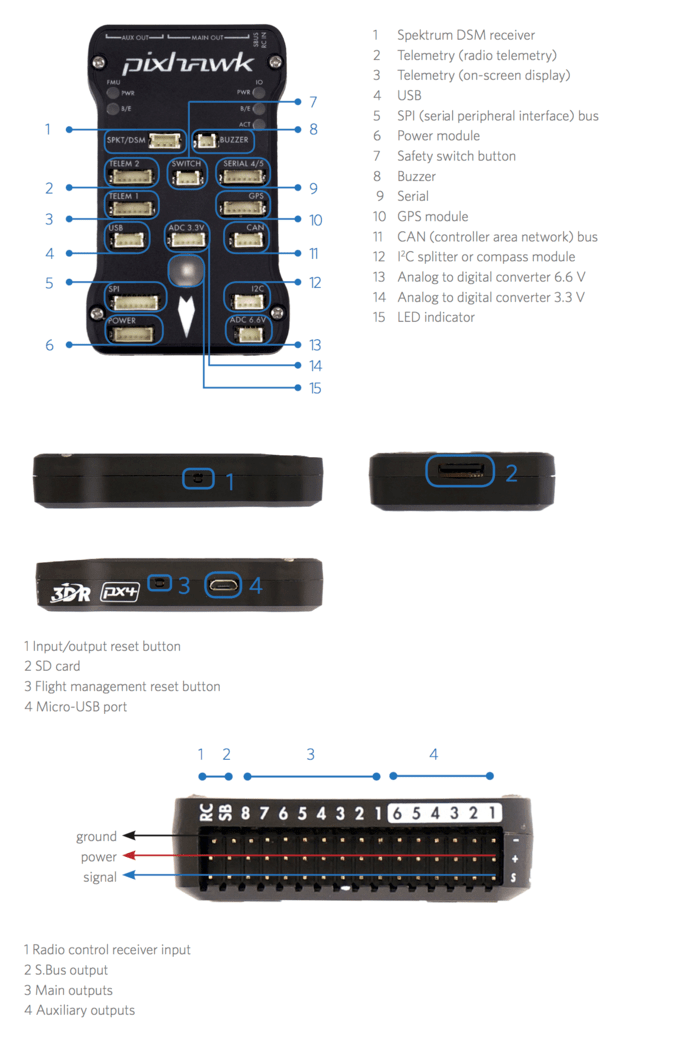
З'єднання
Порти Pixhawk показані нижче. Вони використовують роз’єми Hirose DF13 (передують роз’ємам JST-GH, визначеним у стандарті роз’ємів Pixhawk).
WARNING
Багато клонів 3DR Pixhawk використовують роз’єми Molex picoblade замість роз’ємів DF13. Вони мають прямокутні штифти замість квадратних, і їх не можна вважати сумісними.
TIP
Порт RC IN призначений лише для RC приймачів і забезпечує достатню потужність для цієї мети. НІКОЛИ не підключайте до нього або до підключеного приймача жодних сервоприводів, джерел живлення або батарей.
Схема розташування виводів
TELEM1, TELEM2 порти
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
GPS port
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CAN2 TX | +3.3V |
| 5 (blk) | CAN2 RX | +3.3V |
| 6 (blk) | GND | GND |
SERIAL 4/5 port
У зв'язку з обмеженням простору два порти знаходяться на одному роз'ємі.
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (#4) | +3.3V |
| 3 (blk) | RX (#4) | +3.3V |
| 4 (blk) | TX (#5) | +3.3V |
| 5 (blk) | RX (#5) | +3.3V |
| 6 (blk) | GND | GND |
ADC 6.6V
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | up to +6.6V |
| 3 (blk) | GND | GND |
ADC 3.3V
| Pin | Signal | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | ADC IN | до +3.3V |
| 3 (blk) | GND | GND |
| 4 (blk) | ADC IN | до +3.3V |
| 5 (blk) | GND | GND |
I2C
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SCL | +3.3 (pullups) |
| 3 (blk) | SDA | +3.3 (pullups) |
| 4 (blk) | GND | GND |
CAN
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
SPI (питома споживана потужність)
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | SPI_EXT_SCK | +3.3 |
| 3 (blk) | SPI_EXT_MISO | +3.3 |
| 4 (blk) | SPI_EXT_MOSI | +3.3 |
| 5 (blk) | !SPI_EXT_NSS | +3.3 |
| 6 (blk) | !GPIO_EXT | +3.3 |
| 7 (blk) | GND | GND |
POWER
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
SWITCH
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | VCC | +3.3V |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | SAFETY | GND |
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |
Відладочні порти
Порт Консолі
Консоль системи PX4 працює на порту, позначеному SERIAL4/5.
TIP
Зручний спосіб підключення до консолі - скористатися Dronecode probe, оскільки він поставляється з роз'ємами, які можна використовувати з кількома різними пристроями Pixhawk. Просто під'єднайте кабель DF13 1:1 з 6-позиційним роз'ємом з Dronecode probe до порту Pixhawk SERIAL4/5.

Розводка є стандартною послідовною розводкою, призначеною для підключення до кабелю 3.3V FTDI (до 5V).
| 3DR Pixhawk 1 | FTDI | |
|---|---|---|
| 1 | +5V (red) | |
| 2 | S4 Tx | |
| 3 | S4 Rx | |
| 4 | S5 Tx | 5 |
| 5 | S5 Rx | 4 |
| 6 | GND | 1 |
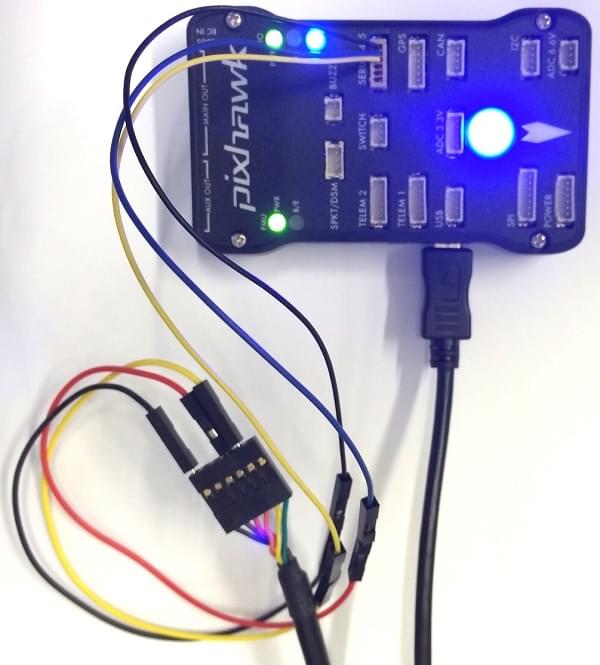
Підключення кабелю FTDI до 6-контактного роз’єму DF13 1:1 показано на малюнку нижче.

Повна проводка показана нижче.
Для отримання інформації про те, як використовувати консоль, див: Системна консоль.
SWD Port
Порти SWD (JTAG) приховані під покриттям (яке треба зняти для налагодження апаратного забезпечення). Є окремі порти для FMU та IO, як показано нижче.
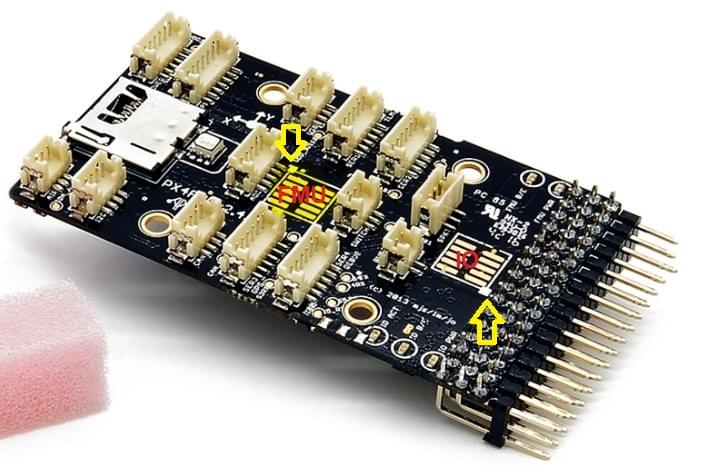
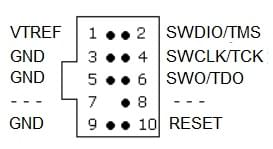
Порти являють собою 10-контактні роз’єми JTAG ARM, які вам, ймовірно, доведеться паяти. Схема контактів для портів показана нижче (квадратні маркери в кутах вище вказують на контакт 1).
INFO
Усі плати Pixhawk FMUv2 мають подібний порт SWD.
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v2_defaultЧастини / Корпуси
- ARM MINI JTAG (J6): 1.27 mm 10pos header (SHROUDED), for Black Magic Probe: FCI 20021521-00010D4LF (Distrelec, Digi-Key) or Samtec FTSH-105-01-F-DV-K (untested) or Harwin M50-3600542 (Digikey or Mouser)
- JTAG Adapter Option #1: BlackMagic Probe. Зверніть увагу, що може поставлятися без кабелів (перевірте у виробника). Якщо так, вам знадобиться кабель Samtec FFSD-05-D-06.00-01-N (Samtec sample service або Digi-Key Link: SAM8218-ND) або Tag Connect Ribbon та кабель Mini-USB.
- JTAG Adapter Option #2: Digi-Key Link: ST-LINK/V2 / ST USER MANUAL, потрібен адаптер ARM Mini JTAG до 20pos: Digi-Key Link: 726-1193-ND
- JTAG Adapter Option #3: SparkFun Link: Olimex ARM-TINY або будь-який інший адаптер JTAG ARM Cortex, сумісний з OpenOCD, потребує адаптера ARM Mini JTAG на 20 контактів: Digi-Key Link: 726-1193-ND
- USARTs: Hirose DF13 6 pos (Digi-Key Link: DF13A-6P-1.25H(20))
- Mates: Hirose DF13 6 pos housing (Digi-Key Link: Hirose DF13-6S-1.25C)
- I2C і CAN: Hirose DF13 4 pos (Digi-Key Link: DF13A-4P-1.25H(20) - знято з виробництва)
Підтримувані платформи / шасі
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus.