Holybro Pixhawk 6C Mini
WARNING
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Pixhawk 6C Mini® є останнім оновленням успішної серії політних контролерів Pixhawk®, розроблених та виготовлених у співпраці між Holybro® та командою PX4.
Він оснащений високопродуктивним процесором H7, резервуванням IMU, платою IMU з контролем температури та економічним дизайном, що забезпечує неймовірну продуктивність і надійність. Він відповідає Pixhawk Connector Standard.
TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Введення
Pixhawk® 6C Mini є останнім оновленням успішної серії політних контролерів Pixhawk®.
Всередині Pixhawk® 6C Mini ви можете знайти STM32H743 на базі STMicroelectronics®, у поєднанні з технологією сенсорів від Bosch® & InvenSense®, що надає гнучкість і надійність для керування будь-яким автономним апаратом, придатним як для академічних, так і для комерційних застосувань.
Мікроконтролер H7 Pixhawk® 6C Mini містить ядро Arm® Cortex®-M7 до 480 MHz, має 2MB flash пам’яті та 1MB RAM. Завдяки оновленій потужності обробки розробники можуть бути більш продуктивними та ефективними у своїй роботі з розробкою, що дозволяє використовувати складні алгоритми та моделі.
Pixhawk 6C Mini включає високопродуктивні, низькошумні IMU на борту, розроблені бути економічними, але водночас маючи резервування IMU. Система ізоляції вібрації для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних вимірювань, що дозволяє апаратам досягти кращих загальних польотних характеристик.
Pixhawk® 6C Mini ідеально підходить для розробників у корпоративних дослідницьких лабораторіях, стартапах, академічних закладах (дослідники, професори, студенти) та комерційних застосувань.
Ключові моменти дизайну
- Високопродуктивний процесор STM32H743 з більшою обчислювальною потужністю та оперативною пам'яттю
- Новий економічний дизайн із низькопрофільним форм-фактором
- Нова інтегрована система ізоляції вібрацій, призначена для фільтрації високочастотних вібрацій та зменшення шуму для забезпечення точних вимірювань
- IMU контролюються за допомогою нагрівальних резисторів на борту, що дозволяє досягти оптимальної робочої температури IMU
Технічна специфікація
Процесори & датчики
- FMU процесор: STM32H743
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB memory, 1MB SRAM
- IO процесор: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- Бортові сенсори
- Accel/Gyro: ICM-42688-P
- Accel/Gyro: BMI055
- Mag: IST8310
- Barometer: MS5611
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 6V
- Вхід USB Power: 4.75~5.25V
- Вхід Servo Rail: 0~36V
- Номінальний струм:
- `TELEM1`` обмежувач максимального вихідного струму: 1A
- Комбінований обмежувач вихідного струму всіх інших портів: 1A
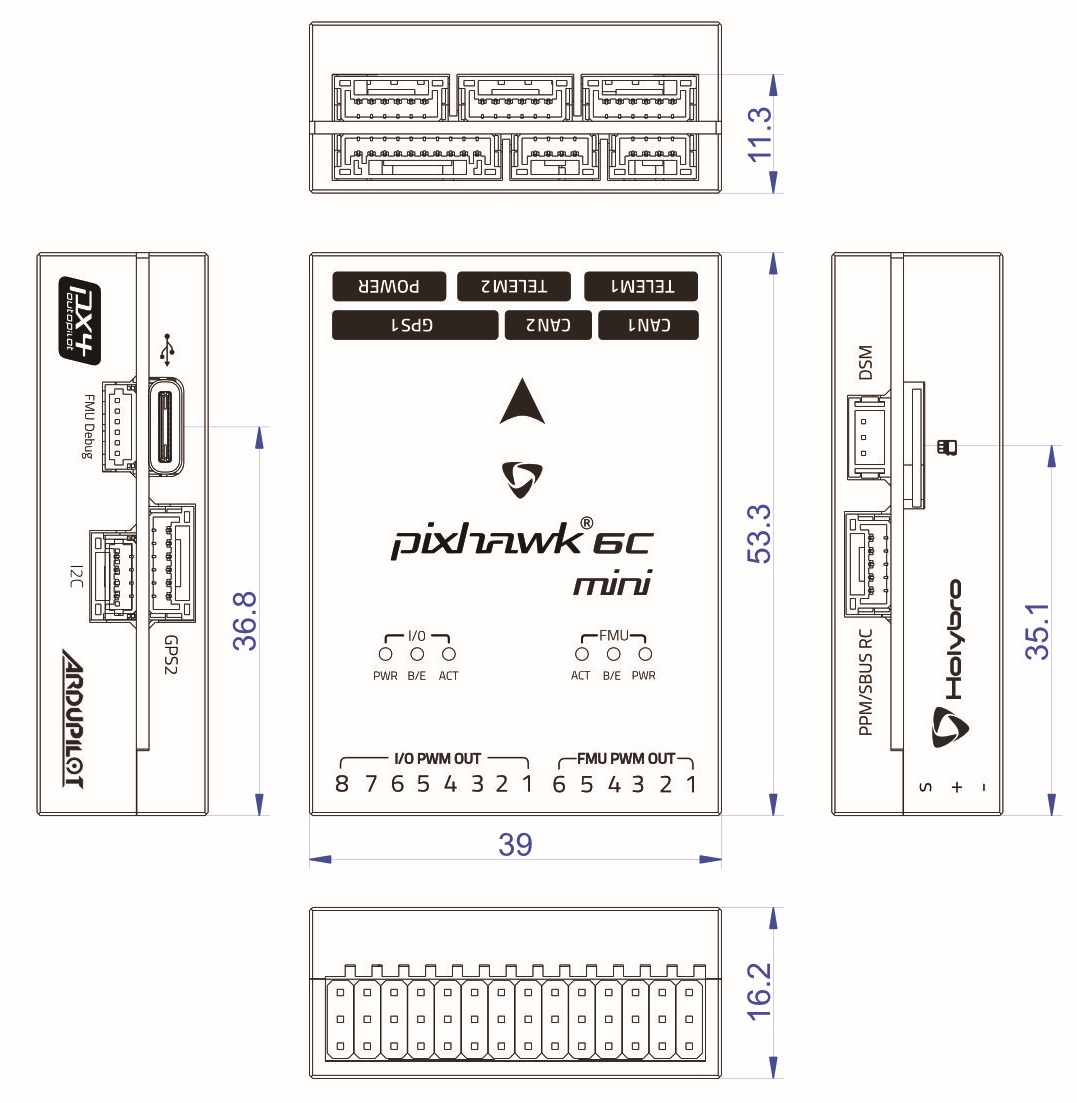
Механічні дані
- Розміри: 53.3 x 39 x 16.2 mm
- Вага: 39.2г
Інтерфейси
16- PWM серво виводів (8 з IO, 6 з FMU)
3 загальних послідовних порти
TELEM1- Повний контроль потоку, окреме обмеження струму 1ATELEM2- Повний контроль потоку
2 порти GPS
- GPS1 - Повний порт GPS (GPS плюс захисний перемикач)
- GPS2 - Базовий порт GPS
1 I2C порт
- Підтримує виділене I2C калібрування EEPROM, розташоване на модулі сенсорів
2 CAN шини
- CAN шина має individual silent controls або ESC RX-MUX control
1 порт відладки:
- FMU Debug Mini
Виділений R/C вхід для Spektrum/DSM та S.BUS, CPPM, аналоговий / PWM RSSI
1 вхідний порт живлення (аналоговий)
Інші характеристики:
- Температура роботи та зберігання: -40 ~ 85°c
Де придбати
Замовляйте на Holybro.
Збірка / налаштування
Порт Pixhawk 4 Mini дуже схожий з портом Pixhawk 6C Mini. Будь ласка, зверніться до Швидкого старту з підключення Pixhawk 4 Mini, оскільки він надає інструкції щодо збірки необхідних/важливих периферійних пристроїв, включаючи GPS, модуль живлення тощо.
Розводка
Зіставлення послідовних портів
| UART | Device | Опис параметра QGC | Мітка порту на FC |
|---|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 | GPS1 |
| USART2 | /dev/ttyS1 | TELEM3 | N/A |
| USART3 | /dev/ttyS2 | N/A | FMU Debug |
| UART5 | /dev/ttyS3 | TELEM2 | TELEM2 |
| USART6 | /dev/ttyS4 | PX4IO | I/O PWM Out |
| UART7 | /dev/ttyS5 | TELEM1 | TELEM1 |
| UART8 | /dev/ttyS6 | GPS2 | GPS2 |
Розміри
Номінальна напруга
Pixhawk 6C Mini може бути подвійно резервним у джерелі живлення, якщо подаються два джерела живлення. Дві шини живлення: POWER1 і USB.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 входи (4.9V до 5.5V)
- USB вхід (4.75V до 5.25V)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 входи (операційний діапазон 4.1V до 5.7V, 0V до 10V без пошкоджень)
- USB вхід (операційний діапазон 4.1V до 5.7V, 0V до 6V без пошкоджень)
- Servo вхід: контакт VDD_SERVO FMU PWM OUT та I/O PWM OUT (0V до 42V без пошкоджень)
Моніторинг напруги
Pixhawk 6C Mini використовує аналогові модулі живлення.
Holybro виготовляє різноманітні аналогові модулі живлення для різних потреб:
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v6c_defaultВідладочний порт
Системна консоль PX4 та SWD interface працюють на порту FMU Debug.
Розводка та роз’єм відповідають інтерфейсу Pixhawk Debug Mini, визначеному в Pixhawk Connector Standard (роз’єм JST SH).
| Pin | Signal | Volt |
|---|---|---|
| 1 (червоний) | Vtref | +3.3V |
| 2 (чорний) | Console TX (OUT) | +3.3V |
| 3 (чорний) | Console RX (IN) | +3.3V |
| 4 (чорний) | SWDIO | +3.3V |
| 5 (чорний) | SWCLK | +3.3V |
| 6 (чорний) | GND | GND |
Інформацію про використання цього порту див:
- SWD Debug Port
- Системна консоль PX4 (Зауважте, що консоль FMU зіставляється з USART3).
Периферія
Підтримувані платформи / шасі
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний перелік підтримуваних конфігурацій можна переглянути в розділі Довідник планерів.