RTK GNSS (GPS)
Системи GNSS/GPS з реальним кінематичним положенням (RTK) забезпечують точність на рівні сантиметрів, що дозволяє використовувати PX4 у таких застосунках, як точне обстеження (де важлива точність до кожного сантиметра).
Ця функція потребує QGroundControl, який працює на ноутбуці/ПК та транспортного засобу з бездротовим або телеметричним радіозв'язком з наземним лаптопом.
Деякі налаштування RTK GNSS можуть надавати інформацію про курс/головний напрямок як альтернативу компасу:
- Напрямок за допомогою RTK GPS з подвійним u-blox F9P.
- GPS безпосередньо виводить курс (див. таблицю нижче).
Пристрої, що підтримуються
PX4 підтримує GPS u-blox M8P, u-blox F9P та Trimble MB-Two, а також продукцію, що включає їх.
Список сумісних пристроїв RTK нижче, які очікуються для роботи з PX4 (він виключає припинені пристрої). Таблиця вказує пристрої, які також виводять курсову відмітку, а також можуть надавати курсову відмітку, коли використовуються дві одиниці на транспортному засобі. Він також відзначає пристрої, які підключаються через CAN шину, та ті, які підтримують PPK (пост-процесуальну кінематику).
| Пристрій | GPS | Компас | DroneCAN | GPS Yaw | Подвійний курс F9P GPS | PPK |
|---|---|---|---|---|---|---|
| ARK RTK GPS | F9P | ICM42688p | ✓ | ✓ | ||
| CUAV C-RTK GPS | M8P/M8N | ✓ | ||||
| CUAV C-RTK2 | F9P | ✓ | ✓ | |||
| CUAV C-RTK 9Ps GPS | F9P | RM3100 | ✓ | |||
| CUAV C-RTK2 PPK/RTK GNSS | F9P | RM3100 | ✓ | |||
| CubePilot Here+ RTK GPS | M8P | HMC5983 | ||||
| CubePilot Here3 CAN GNSS GPS (M8N) | M8P | ICM20948 | ✓ | |||
| Drotek SIRIUS RTK GNSS ROVER (F9P) | F9P | RM3100 | ✓ | |||
| Femtones MINI2 Receiver | FB672, FB6A0 | ✓ | ||||
| Freefly RTK GPS | F9P | IST8310 | ||||
| Holybro H-RTK F9P Ultralight | F9P | IST8310 | ✓ | |||
| Holybro H-RTK F9P Helical or Base | F9P | IST8310 | ✓ | |||
| Holybro DroneCAN H-RTK F9P Helical | F9P | BMM150 | ✓ | ✓ | ||
| Holybro H-RTK F9P Rover Lite | F9P | IST8310 | ||||
| Holybro DroneCAN H-RTK F9P Rover | F9P | BMM150 | ✓ | |||
| Holybro H-RTK M8P GNSS | M8P | IST8310 | ||||
| Holybro H-RTK Unicore UM982 GPS | UM982 | IST8310 | ||||
| LOCOSYS Hawk R1 | MC-1612-V2b | |||||
| LOCOSYS Hawk R2 | MC-1612-V2b | IST8310 | ||||
| mRo u-blox ZED-F9 RTK L1/L2 GPS | F9P | ✓ | ✓ | |||
| Septentrio AsteRx-m3 Pro | AsteRx | ✓ | ✓ | Положення двох антен Septentrio | ✓ | |
| Septentrio mosaic-go | mosaic X5 / mosaic H | ✓ | ✓ | Голова Септентріо подвійної антени | ✓ | |
| SIRIUS RTK GNSS ROVER (F9P) | F9P | ✓ | ✓ | |||
| SparkFun GPS-RTK2 Board - ZED-F9P | F9P | ✓ | ✓ | |||
| Trimble MB-Two | F9P | ✓ | ✓ |
Примітки:
- ✓ або конкретний номер артикулу вказує на те, що функція підтримується, тоді як ✗ або пусте поле вказує на те, що функція не підтримується. "?" означає "невідомо".
- Там, де це можливо і доречно, використовується назва деталі (наприклад, ✓ у колонці GPS вказує на наявність GPS-модуля, але деталь невідома).
- Деякі RTK-модулі можна використовувати лише в певній ролі (база або ровер), тоді як інші можна використовувати як взаємозамінні.
- У списку може бути відсутнє деяке зняте з виробництва обладнання, яке все ще підтримується. Наприклад, CubePilot Here+ RTK GPS більше не випускається і може бути вилучений зі списку у наступному релізі. Перевірте попередні версії, якщо тут не згадано модуль, який перестали випускати.
Налаштування/Конфігурація розташування
Позиціонування RTK вимагає пару пристроїв RTK GNSS: "базового" для земельної станції та "роувера" для транспортного засобу.
Крім того, вам знадобиться:
- Ноутбук/ПК з QGroundControl (QGroundControl для Android/iOS не підтримує RTK)
- Транспортний засіб із WiFi або телеметричним радіозв'язком з ноутбуком.
QGroundControl with a base module can theoretically enable RTK GPS for multiple vehicles/rover modules. На момент написання цього випадку використання цей випадок не був протестований.
Налаштування обладнання
Модуль Rover RTK (Транспортний)
Спосіб підключення та необхідні кабелі/роз'єми залежать від вибраного модуля RTK (і від контролера польоту).
Більшість з'єднані через порт GPS контролера польоту, так само, як будь-який інший модуль GPS. Деякі з них підключені до шини CAN (тобто використовують DroneCAN).
See documentation for the selected device, general GNSS Hardware/Configuration Setup, and DroneCAN for more information on wiring and configuration.
Базовий модуль RTK (наземний)
Підключіть базовий модуль до QGroundControl за допомогою USB. Модуль бази не повинен зміщуватися, коли його використовують.
TIP
Виберіть позицію, де базовий модуль не потрібно буде переміщувати, має чіткий вид на небо і добре відокремлений від будь-яких будівель. Часто корисно підняти базовий GPS, використовуючи штатив або монтувавши його на дах.
Телеметрійне радіо/WiFi
Автомобіль і ноутбук керування на землі повинні бути підключені через Wi-Fi або радіозв'язок телеметрії.
Посилання має використовувати протокол MAVLink 2, оскільки він більш ефективно використовує канал. Це повинно бути встановлено за замовчуванням, але якщо ні, слід дотримуватися конфігураційні інструкції MAVLink2 нижче.
Процес підключення RTK
Підключення RTK GPS насправді просте:
- Розпочніть виконання QGroundControl та підключіть базовий RTK GPS через USB до наземної станції. Пристрій визнається автоматично.
- Запустіть автомобіль і переконайтеся, що він підключений до QGroundControl.
TIP
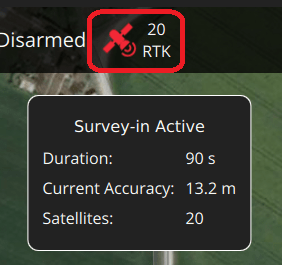
QGroundControl показує значок статусу RTK GPS у верхній панелі значків, коли підключено пристрій RTK GPS (на додачу до звичайного значка статусу GPS). Іконка червона, поки налаштовується RTK, а потім змінюється на білу, коли RTK GPS активний. Ви можете натиснути на піктограму, щоб побачити поточний стан та точність RTK.
QGroundControl потім починає процес налаштування RTK (відомий як "Survey-In").
Survey-In - це процедура запуску для отримання точної оцінки положення базової станції. Процес зазвичай триває кілька хвилин (він закінчується після досягнення мінімального часу та точності, вказаних у налаштуваннях RTK).
Ви можете відстежити прогрес, натиснувши на піктограму стану RTK GPS.
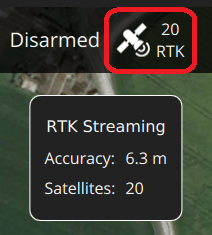
Після завершення опитування:
Іконка RTK GPS змінюється на білу, а QGroundControl починає транслювати дані про позицію на транспортний засіб:
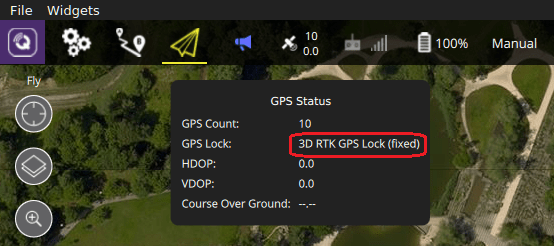
Транспортний GPS переходить у режим RTK. Новий режим відображається у звичайному піктограмі стану GPS (<0>звичайний</0> блокування GPS RTK 3D):
Налаштування GPS як Джерело розділення/Курсування
GPS може бути використаний як джерело для об'єднання повороту, коли використовуються модулі, де вихід повороту підтримується пристроєм (наприклад, Trimble MB-Two) або при використанні деяких Налаштувань RTK GPS з подвійними u-blox F9P.
Під час використання GPS для злиття по курсу вам доведеться налаштувати наступні параметри:
| Параметр | Налаштування |
|---|---|
| GPS_YAW_OFFSET | Кут, який утворює базова лінія (лінія між двома GPS антенами) відносно осі x транспортного засобу (передня/задня вісь, як показано тут). |
| EKF2_GPS_CTRL | Встановіть бітову позицію 3 "Напрямок подвійної антени" на 1 (тобто додайте 8 до значення параметра). |
TIP
Якщо ви використовуєте цю функцію, всі інші конфігурації мають бути налаштовані стандартно (наприклад, RTK Positioning).
Додаткова конфігурація PX4
Можливо, знадобиться змінити наступні налаштування (використовуючи QGroundControl).
Налаштування RTK GPS
Налаштування RTK GPS вказано у QGroundControl Загальних налаштуваннях (SettingsView > Загальні налаштування > Налаштування RTK GPS).
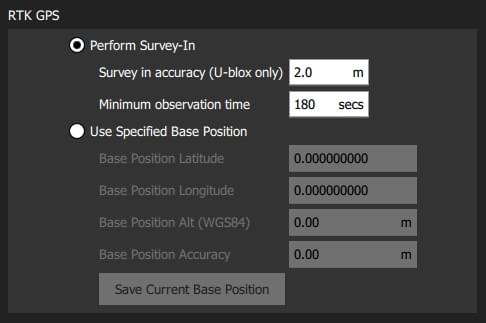
Ці параметри визначають мінімальну тривалість та мінімальну точність для завершення процесу налаштування RTK GPS (відомий як "Survey-In).
TIP
Можна зберегти й повторно використовувати базове положення, щоб заощадити час: виконайте Вимірювання-In один раз, виберіть Використовувати Вказану Базову Позицію та натисніть Зберегти Поточне Базове Положення, щоб скопіювати значення для останнього вимірювання. Значення будуть збережені після перезавантажень QGC до тих пір, поки їх не змінять.
MAVLink2
Протокол MAVLink2 повинен бути використаний, оскільки він ефективніше використовує канали з низькою пропускною здатністю. Це має бути увімкнено за замовчуванням на останніх збірках.
Для забезпечення використання MAVLink2:
- Оновіть прошивку модуля телеметрії до останньої версії (див. QGroundControl > Налаштування > Прошивка).
- Встановіть MAV_PROTO_VER на 2 (див. QGroundControl Налаштування > Параметри)
Налаштування
Вам може додатково знадобитися налаштувати деякі параметри, оскільки параметри за замовчуванням налаштовані з припущенням точності GPS в порядку метрів, а не сантиметрів. Наприклад, ви можете зменшити EKF2_GPS_V_NOISE та EKF2_GPS_P_NOISE на 0.2.
Подвійні приймачі
Другий приймач GPS може бути використаний як резервний (RTK або не RTK). Дивіться розділ Конфігурація GPS EKF2.
Додаткова інформація
- RTK-GPS (Інтеграція PX4): Інформація розробника про інтеграцію підтримки RTK-GPS до PX4.
- Реально-часова кінематика (Wikipedia)