ThePeach FCC-R1
WARNING
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи питань відповідності вимогам.
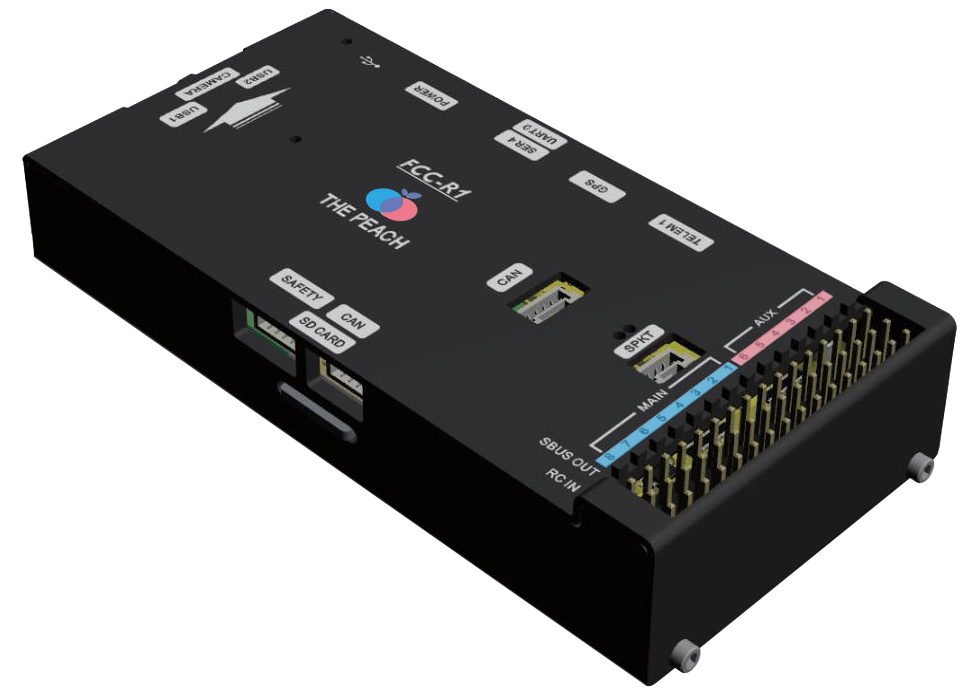
ThePeach FCC-R1 - це сучасний автопілот, розроблений і виготовлений в ThePeach.
Вона базується на Pixhawk-проекті FMUv3 з відкритим апаратним забезпеченням і працює під управлінням PX4 на Nuttx OS.
Характеристики
Основний процесор: STM32F427VIT6
- 32-бітний ARM Cortex-M4, 168 МГц 256 КБ ОЗП 2 МБ флеш-пам'яті
IO процесор: STM32F100C8T6
- ARM Cortex-M3, 32 бітний ARM Cortex-M3, 24 МГц, 8КБ SRAM
Бортові сенсори
- Акселератор/гіроскоп: ICM-20602
- Акселератор/гіроскоп/магнітометр: MPU-9250
- Барометр: MS5611
Інтерфейси
- 8+6 PWM виходів (8 з IO, 6 з FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite сумісний вхід
- Futaba S.BUS сумісний вхід та вихід
- Вхід сигналу PPM sum
- Аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- Запобіжний вимикач / LED
- 4x UART: TELEM1, TELEM2(Raspberry Pi CM3+), GPS, SERIAL4
- 1x I2C порт
- 1x CAN шина
- Аналогові входи для напруги / струму з 1 батареї
Інтерфейси для Raspberry Pi CM3+
- VBUS
- DDR2 Connector: Raspberry Pi CM3+
- 1x UART
- 2x USB
- 1x Raspberry Pi камера
Деталі механічної частини
- Розміри: 49.2 x 101 x 18.2мм
- Вага: 100g
З’єднання
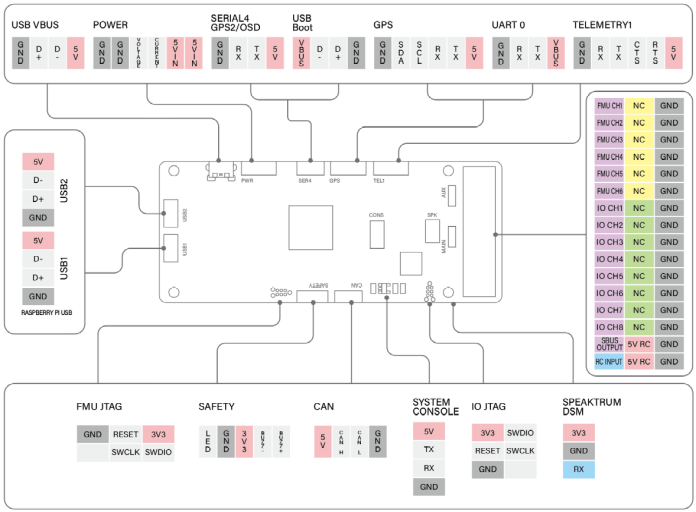
Зіставлення послідовних портів
| UART | Девайс | Port |
|---|---|---|
| USART1 | /dev/ttyS0 | Відладка процесора вводу-виводу |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (Raspberry pi cm3+) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttys5 | Debug console |
| UART8 | /dev/ttyS6 | TELEM4 |
Номінальна напруга
Peach FCC-R1 може мати подвійне резервування живлення, якщо до нього під'єднано два джерела живлення. Шини живлення: POWER та USB.
Примітка:
- Вихідні шини живлення FMU PWM OUT і I/O PWM OUT не живлять плату контролера польоту (і не живляться від неї). Ви повинні подати живлення на один з роз'ємів POWER або USB, інакше плата буде знеструмлена.
- USB не живить Raspberry Pi CM3+. Ви повинні подати живлення на POWER, інакше Raspberry Pi CM3+ буде знеструмлено.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER вхід (5В до 5.5В)
- USB вхід (4.75В до 5.25В)
Абсолютна максимальна напруга
За таких умов всі джерела живлення спричиняють постійні пошкодження контролеру польоту.
POWER вхід (більше 5.5В)
USB вхід (більше 5.5В)
Збірка прошивки
Щоб зібрати PX4 для цього контролера:
jsx
make thepeach_r1_defaultДе купити
Замовляйте у ThePeach