Sensor/Topic Debugging using the Listener Command
UORB - це асинхронний API розсилки / підписки, який використовується для міжпотокового / міжпроцесного зв'язку. Команда listener може бути використана з QGroundControl MAVLink Console для перевірки значень теми (повідомлення), включаючи поточні значення, які публікуються датчиками.
TIP
Це потужний інструмент для відлагодження, оскільки його можна використовувати навіть тоді, коли QGC підключений через бездротове з'єднання (наприклад, коли транспортний засіб летить).
Команда listener також доступна через Системну консоль та MAVLink Shell.
TIP
Щоб перевірити, які теми доступні за якою швидкістю, просто використовуйте команду uorb top.
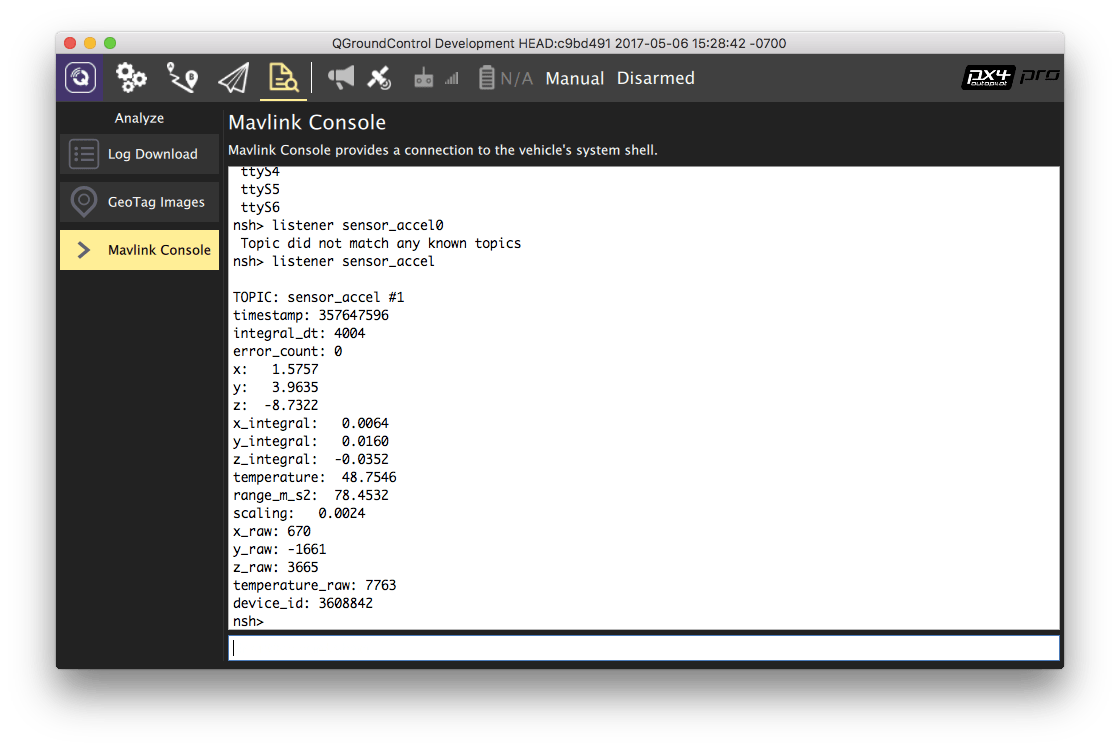
Зображення нижче демонструє використання QGroundControl для отримання значення датчика прискорення.
Для отримання додаткової інформації про те, як визначити доступні теми та як викликати listener, див. : Повідомлення uORB > Перелік тем та прослуховування.