ROS з симуляцією Gazebo Classic
ROS (Робототехнічна операційна система) може бути використана з PX4 та симулятором Gazebo Classic. Вона використовує MAVROS вузол MAVLink для спілкування з PX4.
Інтеграція ROS/Gazebo Classic з PX4 дотримується шаблону на діаграмі нижче (показано загальне середовище симуляції PX4) PX4 спілкується з симулятором (наприклад Gazebo Classic), щоб отримувати дані датчиків із модельованого світу і надсилає значення для двигунів та сервоприводів. Вона спілкується з GCS та зовнішнім API (наприклад ROS) щоб надіслати телеметрію із модельованого середовища та отримати команди.
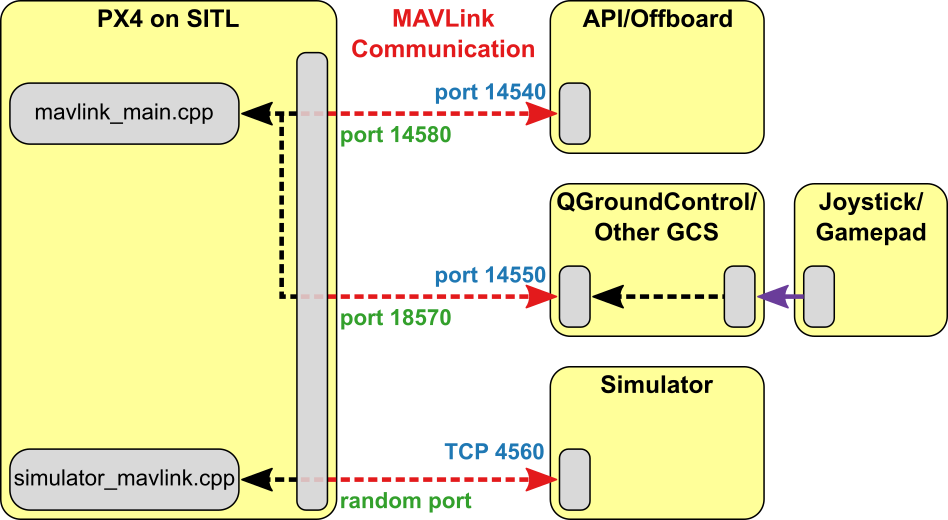
Єдина незначна різниця від "нормальної поведінки" полягає в тому, що ROS ініціює з'єднання на порту 14557, тоді як для зовнішнього API більш типово - це прослуховувати з'єднання на UDP порту 14540.
Встановлення ROS та Gazebo Classic
ROS (1) with MAVROS Installation Guide explains how to set up a guide for working with ROS (1), MAVROS, and PX4.
ROS підтримується тільки на Linux (не macOS або Windows).
Запуск ROS/симуляції
Нижченаведена команда може бути використана для запуску симуляції та під'єднання ROS до неї через MAVROS, де fcu_url - це IP / порт комп'ютера, що виконує симуляцію:
sh
roslaunch mavros px4.launch fcu_url:="udp://:14540@192.168.1.36:14557"Для з'єднання з localhost (локальним комп'ютером), використовуйте цей URL:
sh
roslaunch -w 2 -v mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"Може бути корисно викликати roslaunch з -w NUM_WORKERS (перевизначити кількість робочих потоків) та/або -v (verbose, або розлогий вивід), щоб отримати попередження про відсутні залежності у вашій установці. Наприклад:
sh
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"Запуск Gazebo Classic за допомогою обгорток ROS
Симуляція Gazebo Classic може бути змінена для інтеграції публікації даних датчиків напряму в рубрики ROS наприклад ROS плагін лазера для Gazebo Classic. Для підтримки цієї функції, Gazebo Classic повинна бути запущена з відповідною обгорткою ROS.
Доступні скрипти запуску ROS для запуску симуляції в обгортці ROS:
- posix_sitl.launch: звичайний запуск SITL
- mavros_posix_sitl.launch: SITL та MAVROS
Щоб запустити SITL обгорнуту в ROS, необхідно оновити середовище ROS, а потім запустити як завжди:
(необов'язково): виконувати команду source у робочому просторі catkin потрібно тільки якщо ви скомпілювали MAVROS або інші пакети ROS з вихідного коду:
sh
cd <PX4-Autopilot_clone>
DONT_RUN=1 make px4_sitl_default gazebo-classic
source ~/catkin_ws/devel/setup.bash # (optional)
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic
roslaunch px4 posix_sitl.launchВключіть один зі згаданих вище файлів запуску у ваш власний файл запуску для запуску застосунку ROS в симуляції.
Що відбувається за лаштунками
Цей розділ показує як інструкції roslaunch надані раніше власне працюють (ви можете дотримуватися їх щоб запустити симуляція та ROS вручну).
Вам потрібно три термінали, у всіх потрібно запустити команду source у ROS середовищі.
Спочатку запустіть симулятор, використовуючи наступну команду:
sh
cd <PX4-Autopilot_clone>
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)
roslaunch px4 px4.launchУ консолі буде приблизно це:
sh
INFO [px4] instance: 0
______ __ __ ___
| ___ \ \ \ / / / |
| |_/ / \ V / / /| |
| __/ / \ / /_| |
| | / /^\ \ \___ |
\_| \/ \/ |_/
px4 starting.
INFO [px4] startup script: /bin/sh etc/init.d-posix/rcS 0
INFO [init] found model autostart file as SYS_AUTOSTART=10016
INFO [param] selected parameter default file parameters.bson
INFO [param] importing from 'parameters.bson'
INFO [parameters] BSON document size 295 bytes, decoded 295 bytes (INT32:12, FLOAT:3)
INFO [param] selected parameter backup file parameters_backup.bson
INFO [dataman] data manager file './dataman' size is 7866640 bytes
etc/init.d-posix/rcS: 31: [: Illegal number:
INFO [init] PX4_SIM_HOSTNAME: localhost
INFO [simulator_mavlink] Waiting for simulator to accept connection on TCP port 4560У другому терміналі переконайтесь, що зможете запустити gazebo з файлами світу, визначеними у PX4-Autopilot. Щоб зробити це, встановить змінні середовища, щоб включити відповідні директорії sitl_gazebo-classic.
sh
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicТепер запустіть з Gazebo Classic так, як ви хотіли б працювати з ROS:
sh
roslaunch gazebo_ros empty_world.launch world_name:=$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/worlds/empty.worldУ третьому терміналі переконайтесь що зможете відтворити модель з sdf файлами, визначеними у PX4-Autopilot. Щоб зробити це, встановить змінні середовища, щоб включити відповідні директорії sitl_gazebo-classic.
sh
cd <PX4-Autopilot_clone>
source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classicТепер додайте модель квадрокоптера Iris так, як ви б хотіли коли працюєте з ROS. Після завантаження Iris автоматично з'єднається із застосунком px4.
sh
rosrun gazebo_ros spawn_model -sdf -file $(pwd)/Tools/simulation/gazebo-classic/sitl_gazebo-classic/models/iris/iris.sdf -model iris -x 0 -y 0 -z 0 -R 0 -P 0 -Y 0