Польоти з використанням систем захоплення руху (VICON, NOKOV, Optitrack)
::: попередження РОБОТА В ПРОЦЕСІ
Ця тема значно збігається з Оцінкою зовнішньої позиції (ROS). :::
Системи захоплення руху у приміщенні, такі як VICON, NOKOV та Optitrack, можуть бути використані для надання даних про положення та орієнтацію для оцінки стану транспортного засобу або можуть бути використані як основа для аналізу. Дані з систем захоплення руху можуть бути використані для оновлення локальної оцінки положення PX4 відносно локального початку координат Курс (поворот) з системи захоплення руху також може бути опціонально інтегрований оцінювачем положення.
Дані про положення (позицію та орієнтацію) з системи захоплення руху надсилаються автопілоту через MAVLink, використовуючи повідомлення ATT_POS_MOCAP. Дивіться розділ нижче про системи координат для норм представлення даних. ROS-Mavlink інтерфейс mavros має стандартний плагін для надсилання цього повідомлення. Їх також можна надсилати, використовуючи чистий код на мовах програмування C/C++ та бібліотеки MAVLink.
Архітектура обчислювальних систем
Дуже рекомендується надсилати дані захоплення руху через бортовий комп'ютер (наприклад, Raspberry Pi, ODroid і т. д.) для надійного зв'язку. Вбудований комп'ютер може бути підключений до комп'ютера руху за допомогою WiFi, що забезпечує надійне, високопропускне з'єднання.
Більшість стандартних телеметричних зв'язків, таких як радіоприймачі 3DR/SiK, не підходять для застосувань з високою пропускною здатністю, пов'язаних з захопленням руху.
Системи координат
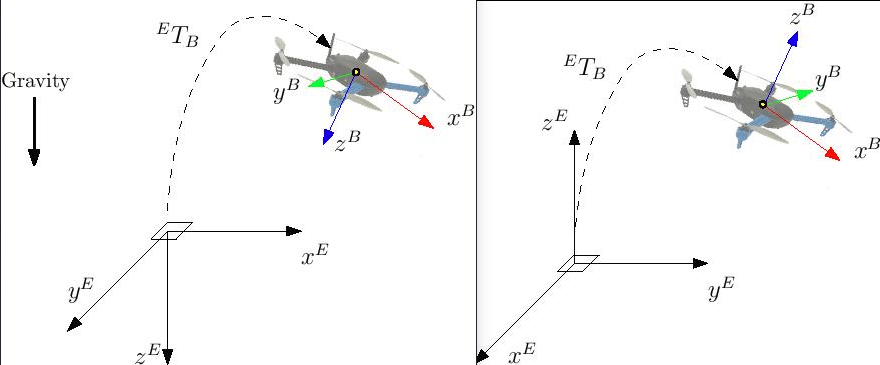
У цьому розділі показано, як налаштувати систему з відповідними опорними системами. Існує різноманітні представлення, але ми використовуватимемо два з них: ENU і NED.
- ENU - це земельно-фіксована система, де вісь X вказує на схід, Y - на північ, а Z - вгору. Корпус робота/транспортного засобу відповідно до цього має вісь X наперед, Z вгору і Y ліворуч.
- NED має вісь **X **направлену на північ, Y - на схід і Z - вниз. Корпус робота/транспортного засобу має вісь X наперед, Z вниз і Y відповідно.
На зображенні нижче показані системи координат. NED ліворуч, ENU праворуч:
Зовнішній оціночний заголовок, однак, ігнорує магнітний північ і підробляється вектором, що відповідає світовій вісі X (який може бути розміщений вільно під час калібрування mocap); кут розвороту буде визначено щодо місцевої вісі X.
WARNING
При створенні жорсткого тіла в програмному забезпеченні захоплення руху спочатку вирівнюйте робота зі світовою віссю X, інакше оцінка розвороту матиме початкове зміщення.
Оціночники стану
EKF2 рекомендується для систем з GPS (LPE застаріла, тому її більше не підтримується або не підтримується). Q-Estimator рекомендується, якщо у вас немає GPS, оскільки він працює без магнітометра або барометра.
Див. Перемикання оціночників стану для отримання додаткової інформації.
EKF2
ROS-тема для motion cap mocap_pose_estimate для систем mocap та vision_pose_estimate для бачення. Перевірте mavros_extras для отримання додаткової інформації.