TFSLOT датчик швидкості польоту ефекту Вентурі
TFSLOT це датчик швидкості повітря з відкритим вихідним кодом, що базується на ефекті Вентурі, який також має ІНС.
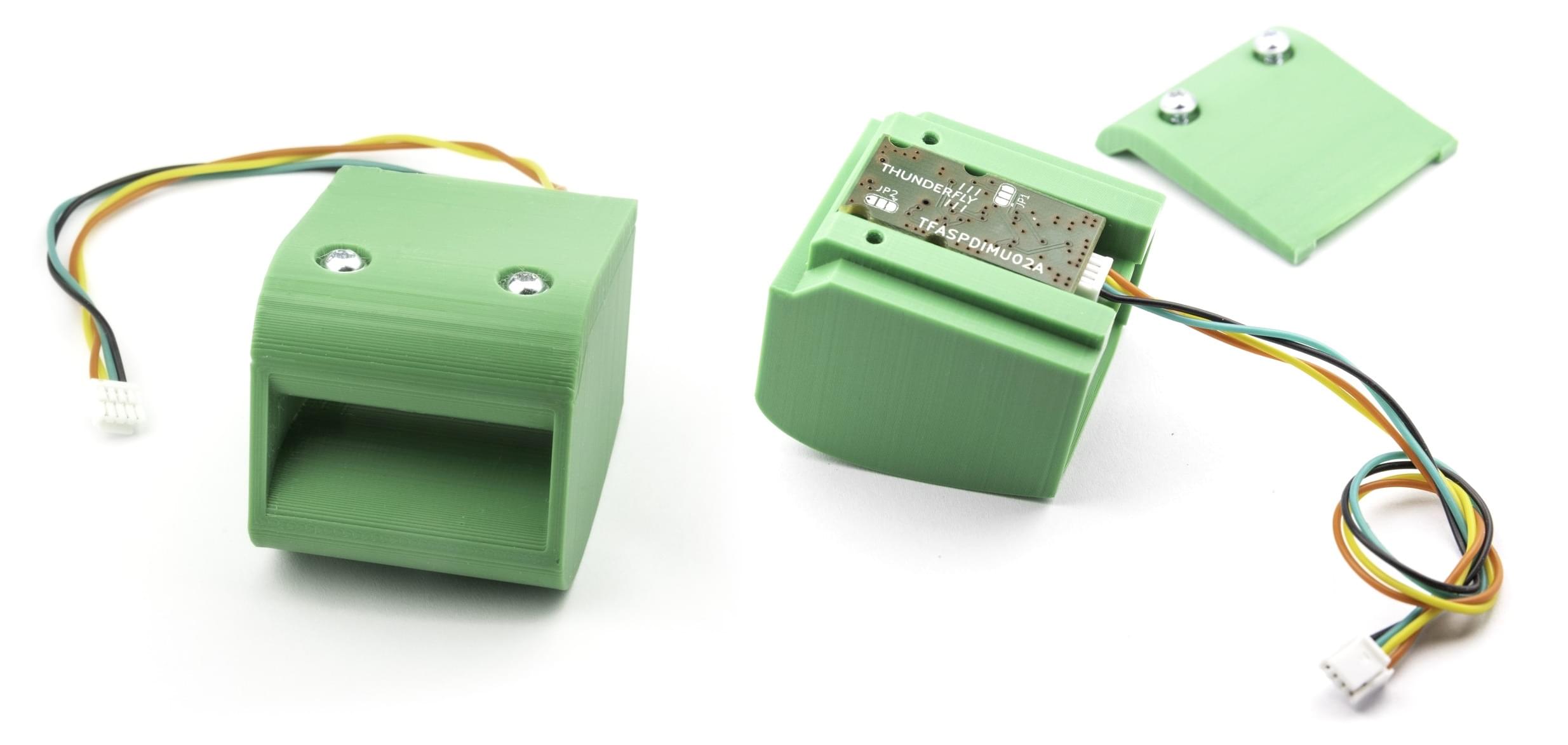
TFSLOT - це датчик швидкості повітря на основі вентурі ефектів. У базовій конфігурації TFSLOT обладнаний платою сенсорів TFASPDIMU02, яка містить диференційний датчик тиску (серія Sensirion SDP3x) та датчик відстеження руху 9-ти осей (ICM-20948). Одиницю IMU можна використовувати як зовнішній компас.
- Цей дизайн має кілька переваг при використанні на невеликих і повільних безпілотних літальних апаратах.
- Краща роздільна здатність при низьких швидкостях повітря (нижче 10 м/с).
- Налаштована чутливість, яка надається зміною профілю.
- Менша схильність до засмічення (наприклад, глиною після посадки)
- Стійкий до погодних умов (дощ, сніг тощо)
- Пряме інтегрування датчика різниці тиску без будь-яких додаткових трубок. Менше шансів на відмову датчика.
- Можливість прямої інтеграції в конструкцію безпілотника. Дизайн є повністю відкритим джерелом.
- Інтегрований зовнішній блок ІНС.
Завдяки надрукованому трубці дуже легко змінити профіль вимірювання і таким чином змінити чутливість в певних діапазонах швидкості. У базовій формі воно оптимізовано так, що виміряний диференційний тиск відповідає тиску від труби Піто.
 Перша інтеграція TFSLOT у автожир TF-G2
Перша інтеграція TFSLOT у автожир TF-G2
INFO
Повна документація та вихідні файли можна знайти на GitHub.
Де купити
TFSLOT можна придбати на магазині Tindie або надіславши нам запит електронною поштою на info@thunderfly.cz
Підключення
TFASPDIMU02 обладнаний роз'ємом I2C JST-GH, який відповідає роз'єму стандарту стандарту дронів. Отже, датчик може бути підключений безпосередньо до порту I2C автопілота за допомогою кабелю I2C 4pin JST-GH.
Конфігурація
Оскільки перед датчиком має бути з'єднана IMU IC, ІК повинен бути встановлений в режимі мосту. Після цього можна запустити драйвер датчика швидкості повітря. Це може бути зроблено за допомогою наступних послідовностей команд. Команди передбачають підключення до порту I2C2.
sh
icm20948_i2c_passthrough start -X -b 2 -a 0x68
sdp3x_airspeed start -X -b 2Цю послідовність можна зберегти на SD-картці у файлі /etc/config.txt. Ви можете дізнатися більше про конфігурацію на SD-картці на окремій сторінці.
Оскільки перетворення різниці тиску на швидкість повітря відрізняється від трубки Піто, цей профіль потребує змін. Це робиться шляхом встановлення параметра CAL_AIR_CMODEL на 3 (датчик швидкості повітря на основі ефекту Вентурі)
Калібрування
Калібрування дещо складне через те, що поточна версія прошивки не підтримує калібрування з від'ємними значеннями. Оскільки використовуваний датчик вимірює обидва напрямки повітряного потоку симетрично і має нульове зміщення, немає потреби калібрувати його знову перед кожним зльотом. Але вам потрібно забезпечити, щоб під час калібрування не було потоку повітря.
Найлегший спосіб калібрування - взяти клейку стрічку і приклеїти її між тиском на входах до датчика. Потім розпочніть процес калібрування і дмухайте ззаду, коли буде вимога. Якщо буде створено тиск принаймні 50 Па, калібрування буде успішним.