Рухомі засоби Gazebo
Цей розділ перераховує/показує рухомі засоби, що підтримуються PX4 симуляцією Gazebo, та команди make необхідні для того щоб їх запустити (команди запускаються з термінала в директорії PX4-Autopilot).
Моделі включені у PX4 як підмодуль який отримується з Репозиторію моделей Gazebo.
Типи рухомих засобів що підтримуються: мультиротор, ВЗІП, літак.
WARNING
Дивіться Рухомі засоби Gazebo Classic для засобів, що працюють зі старішою Симуляцією Gazebo "Classic". Зверніть увагу, що моделі засобів не взаємозамінні між двома версіями симулятору: засоби на цій сторінці будуть працювати тільки з (новим) Gazebo.
Мультикоптер
Квадрокоптер X500
sh
make px4_sitl gz_x500Квадрокоптер X500 з візуальною одометрією
sh
make px4_sitl gz_x500_vision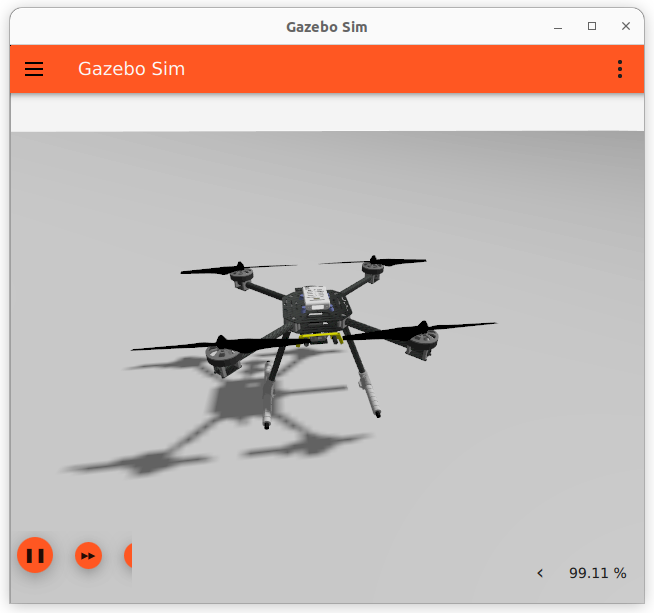
Квадрокоптер X500 з камерою глибини
Ці моделі мають додану камеру глибини, змодельовану за зразком OAK-D.
Камера глибини орієнтована вперед:
sh
make px4_sitl gz_x500_depth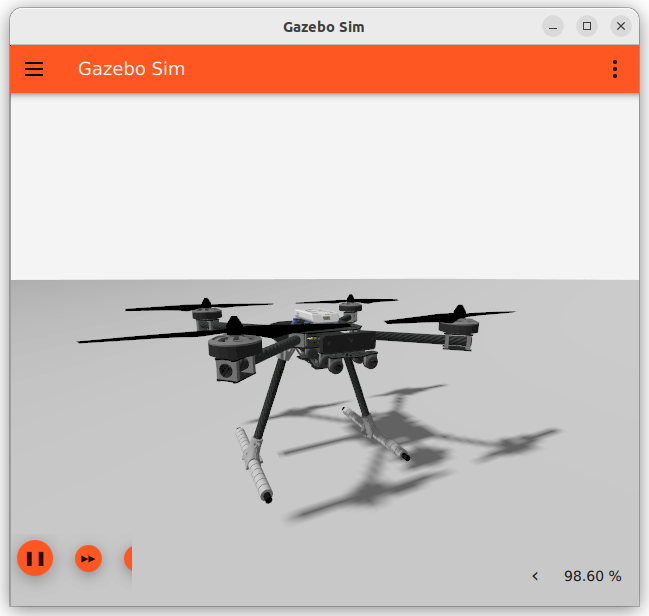
Квадрокоптер X500 з монокулярною камерою
Ці моделі мають доданий простий датчик монокулярної камери (на моделі фізично немає візуалізації камери).
sh
make px4_sitl gz_x500_mono_camINFO
Ця камера поки що не може використовуватись для трансляції відео або захоплення зображень у QGroundControl. Використовуйте PX4-Autopilot#22563 для відстеження додаткової роботи, необхідної для повної реалізації цих випадків використання.
Літак/Фіксоване крило
Стандартний літак
sh
make px4_sitl gz_rc_cessna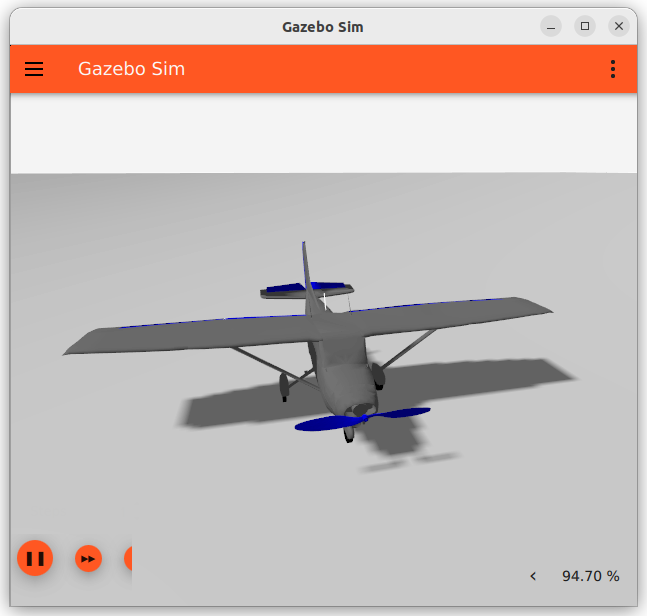
Покращений літак
PX4 v1.15sh
make px4_sitl gz_advanced_plane
INFO
The difference between the Advanced Plane and the "regular plane" lies in the Lift Physics that the two models use:
- Можна налаштувати плагін покращеної піднімної сили що використовуються моделлю для точнішої відповідності певному засобу використовуючи Інструмент "Покращена піднімна сила".
- Для отримання додаткової інформації про розрахунки піднімної сили для покращеного літака, дивіться PX4-SITL_gazebo-classic/src/liftdrag_plugin/index.md
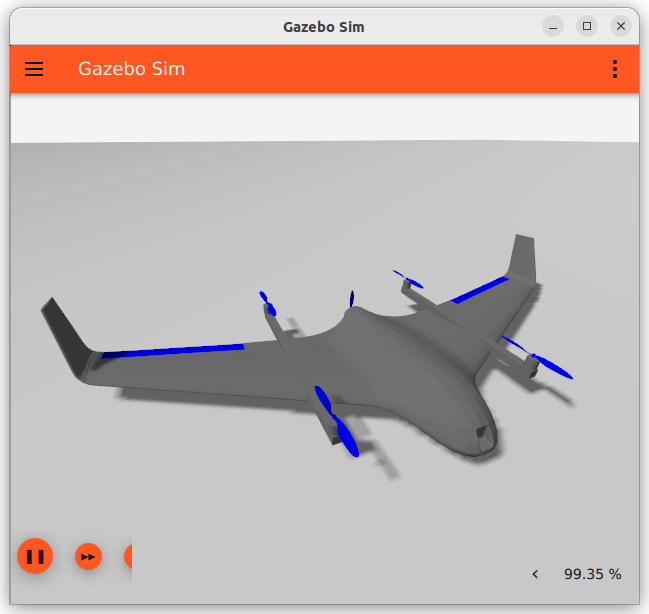
ВЗІП
Стандартний ВЗІП
sh
make px4_sitl gz_standard_vtol