Проектування контролера польоту PX4
Референсний дизайн PX4 - це серія польотних контролерів Pixhawk. Спочатку випущений у 2011 році, цей дизайн зараз на своєму 5-му поколінні (десяте покоління дошки знаходиться в процесі розробки).
Сумісність з бінарним кодом
Всі плати, виготовлені за певним дизайном, мають бути сумісними з двійковим кодом (тобто можуть запускати ту ж саму прошивку). З 2018 року ми будемо надавати набір тестів для перевірки бінарної сумісності, який дозволить нам перевірити та сертифікувати цю сумісність.
Покоління FMU 1-3 були розроблені як відкрите обладнання, тоді як покоління FMU 4 та 5 надали лише специфікації роз'ємів та живлення (схеми були створені окремими виробниками). Для кращої сумісності, починаючи з FMUv6 і пізніше, буде використано повний модельний референтний дизайн.
Reference Design Generations
- FMUv1: Development board (STM32F407, 128 KB RAM, 1MB flash, schematics) (no longer supported by PX4)
- FMUv2: Pixhawk (STM32F427, 168 MHz, 192 KB RAM, 1MB flash, schematics)
- FMUv3: Pixhawk variants with 2MB flash (3DR Pixhawk 2 (Solo), Hex Pixhawk 2.1, Holybro Pixfalcon, 3DR Pixhawk Mini, STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, schematics)
- FMUv4: Pixracer (STM32F427, 168 MHz, 256 KB RAM, 2 MB flash, pinout)
- FMUv4 PRO: Drotek Pixhawk 3 PRO (STM32F469, 180 MHz, 384 KB RAM, 2 MB flash, pinout)
- FMUv5: Holybro Pixhawk 4 (STM32F765, 216 MHz, 512 KB RAM, 2 MB flash, pinout)
- FMUv6: work in progress, final name TBD, variant 6s (STM32H7, 400 MHz, 2 MB RAM, 2 MB flash) and variant 6i (i.MX RT1050, 600 MHz, 512 KB RAM, external flash)
Розподіл функцій основної / ввід-вивідної функції
Діаграма нижче показує розподіл обов'язків автобуса та функціональних відповідальностей між платами FMU та I/O в контролері польоту серії Pixhawk (плати вбудовані в один фізичний модуль).
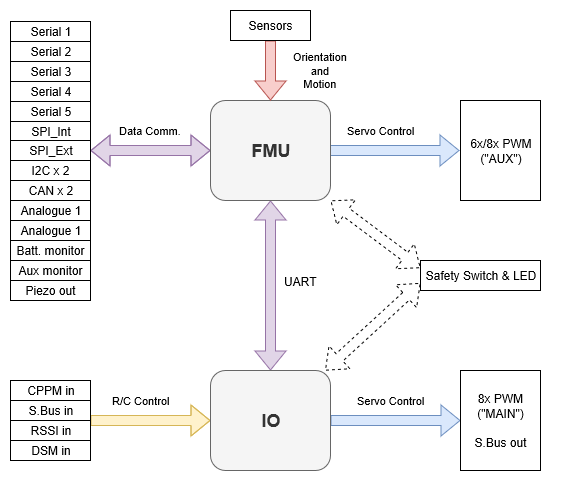
Деякі контролери серії Pixhawk будуються без плати введення-виведення для зменшення розміру або складності, або для кращого вирішення певних сценаріїв використання плати. У цьому випадку І/O драйвер не запущений.
Виробник варіантів польотного контролера без плати введення/виведення часто називають "зменшеною" версією тієї, яка включає плату I/O: наприклад, Pixhawk 4 Міні, _CUAV v5 нано.
Побудовані цілі, які повинні працювати на контролерах польоту з платою вводу/виводу, картують виходи FMU на AUX, а виходи введення/виводу на MAIN (див. діаграму вище). Якщо ціль запускається на обладнанні, де відсутня або вимкнена плата вводу-виводу, вихідні сигнали головних ШШ не будуть присутні. Можливо, ви побачите це, наприклад, запустивши px4_fmu-v5_default на Pixhawk 4 (з IO) та Pixhawk 4 Mini (без IO).
WARNING
На Pixhawk 4 Mini це призводить до неспівпадіння між екранованим написом MAIN на пульті управління кольорової літальної апаратури та шини AUX, яка відображається під час Конфігурації приводів. :::info якщо ціль збірки призначена виконуватися лише на контролері польоту, який не має вводу/виводу, тоді вихідні FMU відображаються на MAIN (наприклад, ціль px4_fmu-v4_default для Pixracer).
Вихідні PWM PX4 відображені на порти MAIN або AUX у Конфігурації Приводів.