Holybro DroneCAN M8N GPS
Holybro DroneCAN GPS має модуль UBLOX M8N, компас BMM150, триколірний індикатор світлодіодів.
Модуль GPS використовує протокол DroneCAN для зв'язку. З'єднання DroneCAN менше чутливі до електромагнітних перешкод порівняно з послідовним з'єднанням, що робить його більш надійним. Крім того, використання DroneCAN означає, що GPS та компас не займають жодних портів послідовного керування польотом (різні/додаткові пристрої CAN можна підключити до того ж шини CAN за допомогою плати розгалужувача CAN).

Де купити
Замовте цей модуль з:
Характеристики обладнання
| DroneCAN M8N | |
|---|---|
| Приймач GNSS | Ublox NEO M8N |
| Кількість одночасних GNSS | 2 (Стандартний GPS + GLONASS) |
| Процесор | STM32G4 (170MHz, 512K FLASH) |
| Компас | BMM150 |
| Смуга частот | GPS: L1C/A |
| Система розширення GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Оновлення навігації | 5Гц За замовчуванням (10Гц МАКС) |
| Чутливість навігації | –167 dBm |
| Холодний запуск | ~ 26s |
| Точність | 2.5m |
| Точність швидкості | 0.05 m/s |
| Макс. # супутників | 22+ |
| Швидкість передачі даних по CAN BUS за замовчуванням | 1MHz |
| Протокол зв'язку | DroneCAN @ 1 Mbit/s |
| Підтримує автопілот FW | PX4, Ardupilot |
| Тип порту | GHR-04V-S |
| Антена | 25 x 25 x 4 мм керамічна патч-антена |
| Напруга | 4.7-5.2V |
| Споживання електроенергії | Менше ніж 200мА @ 5В |
| Температура | -40~80C |
| Розмір | Діаметр: 54мм |
| Вага | 36g |
| Довжина кабелю | 26cm |
| Інше |
|
Налаштування обладнання
Встановлення
Рекомендоване положення монтажу полягає в тому, щоб стрілка на GPS вказувала у напрямку передньої частини дрону.
Датчик може бути встановлений де завгодно на рамці, але ви повинні вказати його позицію відносно центру мас транспортного засобу під час налаштування PX4.
Підключення
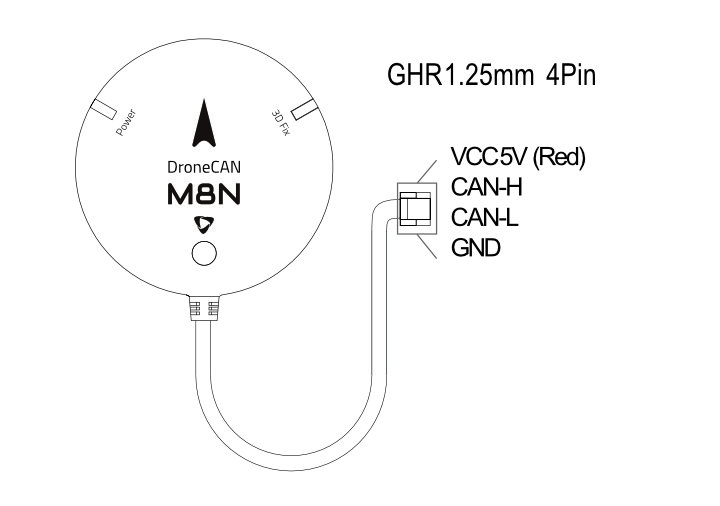
The Holybro DroneCAN GPS підключений до шини CAN за допомогою стандартного кабелю Pixhawk 4 pin JST GH. Для отримання додаткової інформації, зверніться до інструкцій з проводки CAN.
Розпіновка
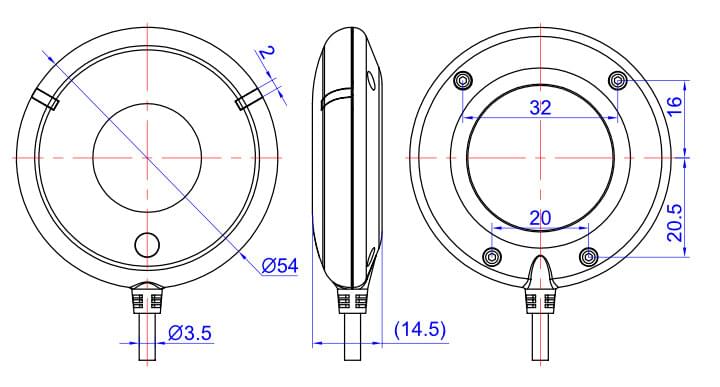
Розміри
Налаштування PX4
Вам потрібно встановити необхідні параметри DroneCAN та визначити зсуви, якщо датчик не знаходиться у центрі транспортного засобу. Необхідні налаштування наведено нижче.
INFO
GPS не завантажиться, якщо SD-карти немає у контролері польоту під час ввімкнення.
Увімкнення DroneCAN
Для використання плати ARK GPS підключіть її до шини CAN Pixhawk та увімкніть драйвер DroneCAN, встановивши параметр UAVCAN_ENABLE на 2 для динамічного призначення вузла (або 3, якщо використовуєте DroneCAN ESCs).
Кроки наступні:
- У QGroundControl встановіть параметр UAVCAN_ENABLE на
2або3та перезавантажте (див. Finding/Updating Parameters). - Підключіть GPS CAN до шини CAN Pixhawk.
Після активації модуль буде виявлено при завантаженні. Дані GPS повинні надходити з частотою 5 Гц.
Конфігурацію DroneCAN в PX4 пояснено більш детально в DroneCAN >Enabling DroneCAN.
Конфігурація позиції датчика
Якщо датчик не знаходиться у центрі пристрою, вам також потрібно буде визначити зміщення датчика:
- Увімкніть GPS синхронізацію по напрямку, встановивши біт 3 EKF2_GPS_CTRL на true.
- Увімкніть UAVCAN_SUB_GPS, UAVCAN_SUB_MAG та UAVCAN_SUB_BARO.
- Встановіть CANNODE_TERM на
1якщо це останній вузол на шині CAN. - Параметри EKF2_GPS_POS_X, EKF2_GPS_POS_Y та EKF2_GPS_POS_Z можуть бути встановлені для врахування зміщення ARK GPS від центру мас транспортного засобу.