Орієнтація політного контролера/датчика
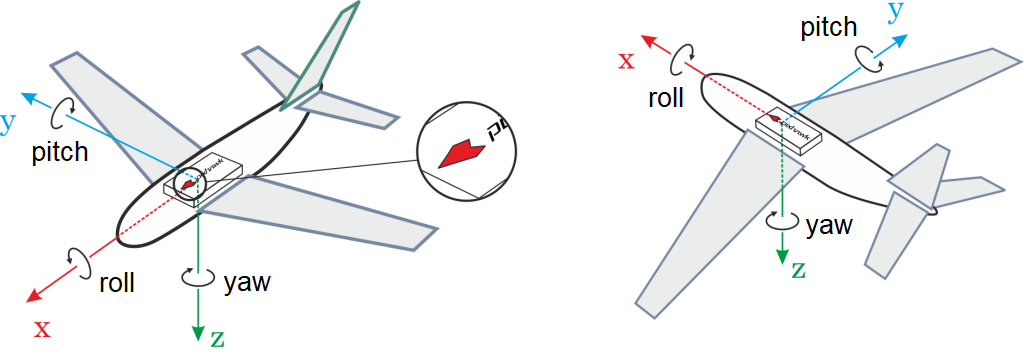
За замовчуванням плату управління польотом та зовнішні компаси (якщо вони є) повинні бути розміщені на верхній стороні рами, орієнтовані так, щоб стрілка вказувала вперед транспортного засобу. Якщо плата або будь-які зовнішні компаси встановлені в іншому положенні, вам потрібно буде налаштувати це в програмному забезпеченні.
Обчислення Орієнтації
Зміщення ROLL, PITCH та/або YAW контролера польоту обчислюються відносно транспортного засобу навколо передньої (x), правої (y), внизу (z) вісей.
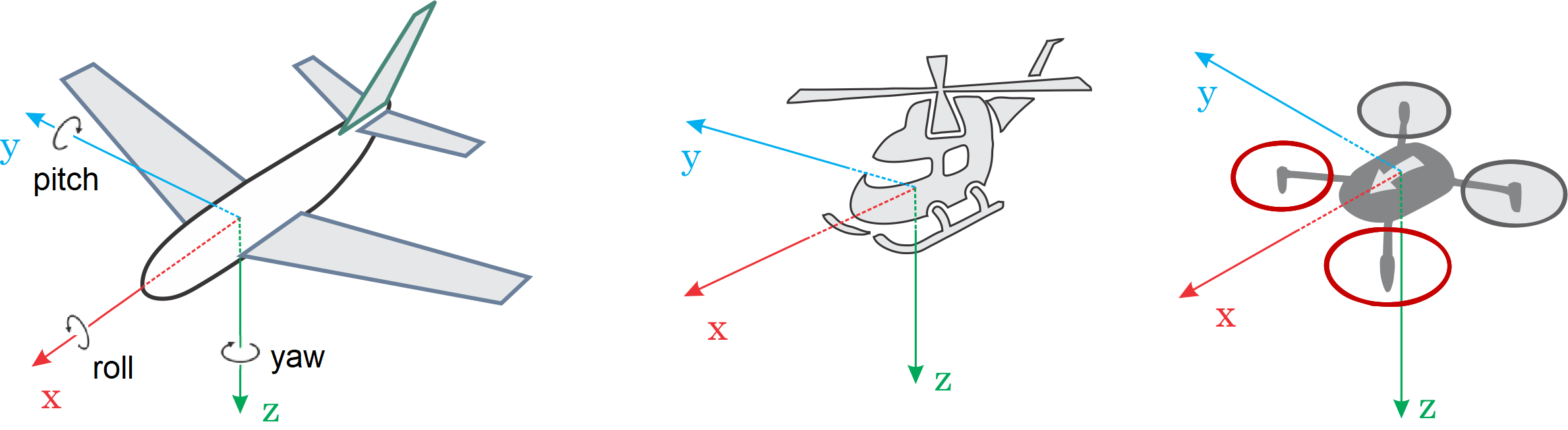
Вісі, навколо яких обертається, залишаються тими самими з одного кроку обертання до наступного. Таким чином, рамка для виконання обертання залишається нерухомою. Це також відомо як зовнішнє обертання.
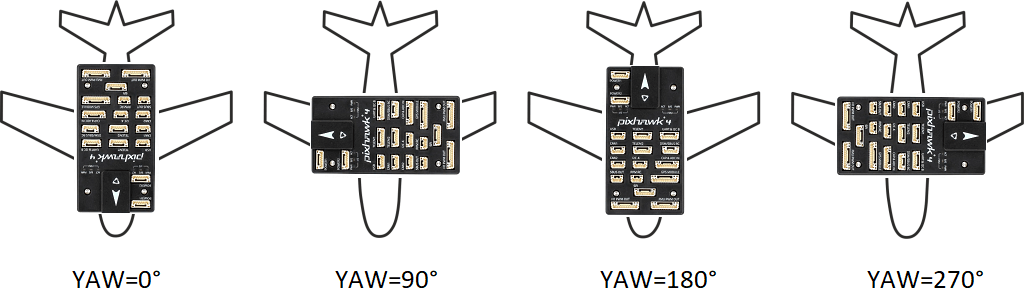
Наприклад, транспортні засоби, показані нижче, мають обертання навколо вісі z (тобто лише руляція), що відповідає: ROTATION_NONE, ROTATION_YAW_90, ROTATION_YAW_180, ROTATION_YAW_270.
Для набору фюзеляжу VTOL Tailsitter встановіть орієнтацію літака відповідно до його конфігурації з багатьма гвинтами (тобто відносно літака під час зльоту, зависання, посадки) для всіх калібрувань датчиків.
Вісь зазвичай відноситься до орієнтації транспортного засобу під час стабільного прямого польоту. Для отримання додаткової інформації дивіться Основні поняття.
Налаштування орієнтації контролера польоту
Щоб встановити орієнтацію:
Запустіть QGroundControl та підключіть транспортний засіб.
Виберіть іконку "Q" > Налаштування транспортного засобу > Датчики (бічна панель), щоб відкрити Налаштування датчиків.
Виберіть кнопку Орієнтації.
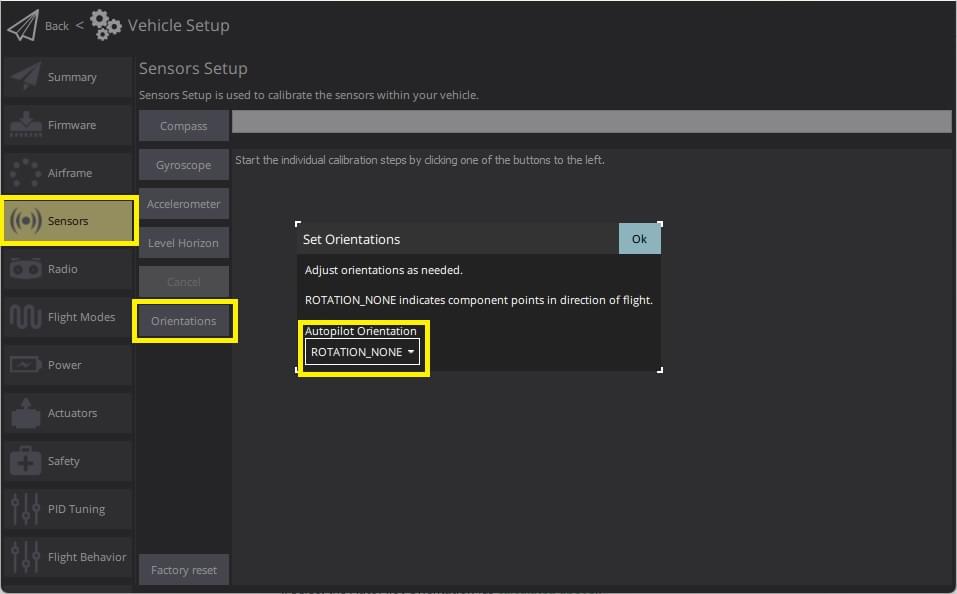
Виберіть Орієнтацію Автопілота (як обчислено вище).
Натисніть OK.
Ви можете використовувати Калібрування горизонту рівня для компенсації невеликих відхилень в орієнтації контролера та вирівнювання горизонту у виді польоту.
Встановлення Орієнтації компаса
PX4 автоматично виявить орієнтацію компасу як частину калібрування компасу (за замовчуванням) для будь-якої з стандартних орієнтацій MAVLink (вертикально та вперед, або будь-який кратний 45° зміщення в будь-якій вісі).
Ви можете підтвердити, що автоматичне виявлення працює, подивившись на параметри CAL_MAGn_ROT.
Якщо було використано нестандартну орієнтацію, вам потрібно задати параметри CAL_MAGx_ROLL, CAL_MAGx_PITCH та CAL_MAGx_YAW для кожного компасу на кути, які були використані.
Це автоматично встановить CAL_MAGn_ROT на "власний кут Ейлера" та запобігає автоматичну калібрування для вибраного компасу (навіть якщо встановлено SENS_MAG_AUTOROT).
Детальна інформація
- Розширена настройка орієнтації (лише для досвідчених користувачів).
- Посібник користувача з QGroundControl > Датчики