Інтерфейс лазерного альтиметра Avionics Anonymous DroneCan
У 2022 році UAVCAN (v0) був форкнутий і підтримується як DroneCAN. Хоча цей продукт все ще згадує "UAVCAN", він повністю сумісний з підтримкою DroneCAN в PX4.
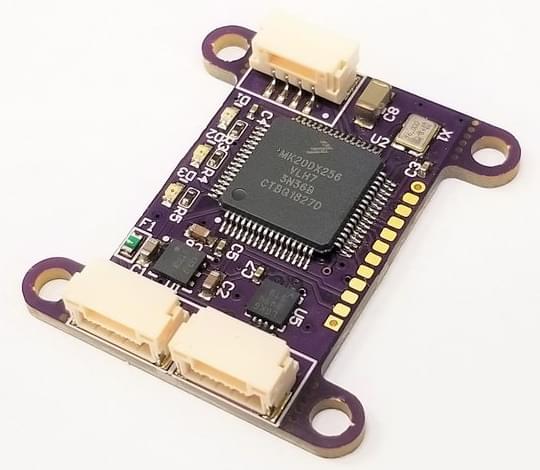
Інтерфейс лазерного альтиметра Avionics Anonymous дозволяє підключати ряд звичайних далекомірів за допомогою шини CAN (це надійніший інтерфейс, ніж I2C).
Де придбати
Підтримувані далекоміри
Повний список підтримуваних далекомірів можна знайти за посиланням вище.
Наступні далекоміри підтримуються на момент написання:
- Lightware SF30/D
- Lightware SF10/a
- Lightware SF10/b
- Lightware SF10/c
- Lightware SF11/c
- Lightware SF/LW20/b
- Lightware SF/LW20/c
Встановлення обладнання
Підключення
Далекомір (лазер) підключений до плати інтерфейсу AvAnon, яка підключена до одного з CAN-портів вашого автопілота. Проводка відбувається згідно з виведенням контактів вище, або необхідні кабелі можна придбати, щоб підключити їх безпосередньо до вашої системи. Ці продукти доступні за посиланнями тут.
Інтерфейсна плата забезпечує фільтрований вихід живлення для лазера, але не забезпечує власного регулювання. Отже, лазер повинен бути сумісним з напругою, яка подається на плату.
Розпіновка
Конектор шини CAN
| Pin | Назва | Опис |
|---|---|---|
| 1 | POWER_IN | Джерело живлення. Підтримується 4.0-5.5В, але також повинно бути сумісним з підключеним лазером. |
| 2 | TX/SCL | TX для послідовного режиму, Clock для режиму I2C. |
| 3 | RX/SDA | RX для послідовного режиму, Data для режиму I2C. |
| 4 | GND | Заземлення сигналу/напруги. |
З'єднувач лазеру
| Pin | Назва | Опис |
|---|---|---|
| 1 | POWER_OUT | Фільтрована потужність при напрузі живлення. |
| 2 | CAN+ | TX для послідовного режиму, Clock для режиму I2C. |
| 3 | RX/SDA | RX для послідовного режиму, Data для режиму I2C. |
| 4 | GND | Заземлення сигналу/напруги. |
Налаштування PX4
Для увімкнення лазерного альтиметра вам необхідно встановити наступні параметри (у QGroundControl):
- Увімкніть DroneCAN, встановивши UAVCAN_ENABLE не нульовим.
- Увімкніть підписку на лазерний далекомір DroneCAN, встановивши UAVCAN_SUB_RNG
- Встановіть мінімальний та максимальний діапазон далекоміра, використовуючи UAVCAN_RNG_MIN та UAVCAN_RNG_MAX.