ModalAI Flight Core v1
PX4 v1.11PX4 не виробляє цей (чи будь-який інший) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
ModalAI Flight Core v1 (Datasheet) є контролером польоту для PX4, виготовленим в США. Flight Core може бути поєднане з ModalAI VOXL (Datasheet) для уникнення перешкод та навігації в умовах відсутності сигналу GPS, або використовуватися незалежно як автономний політ контролер.
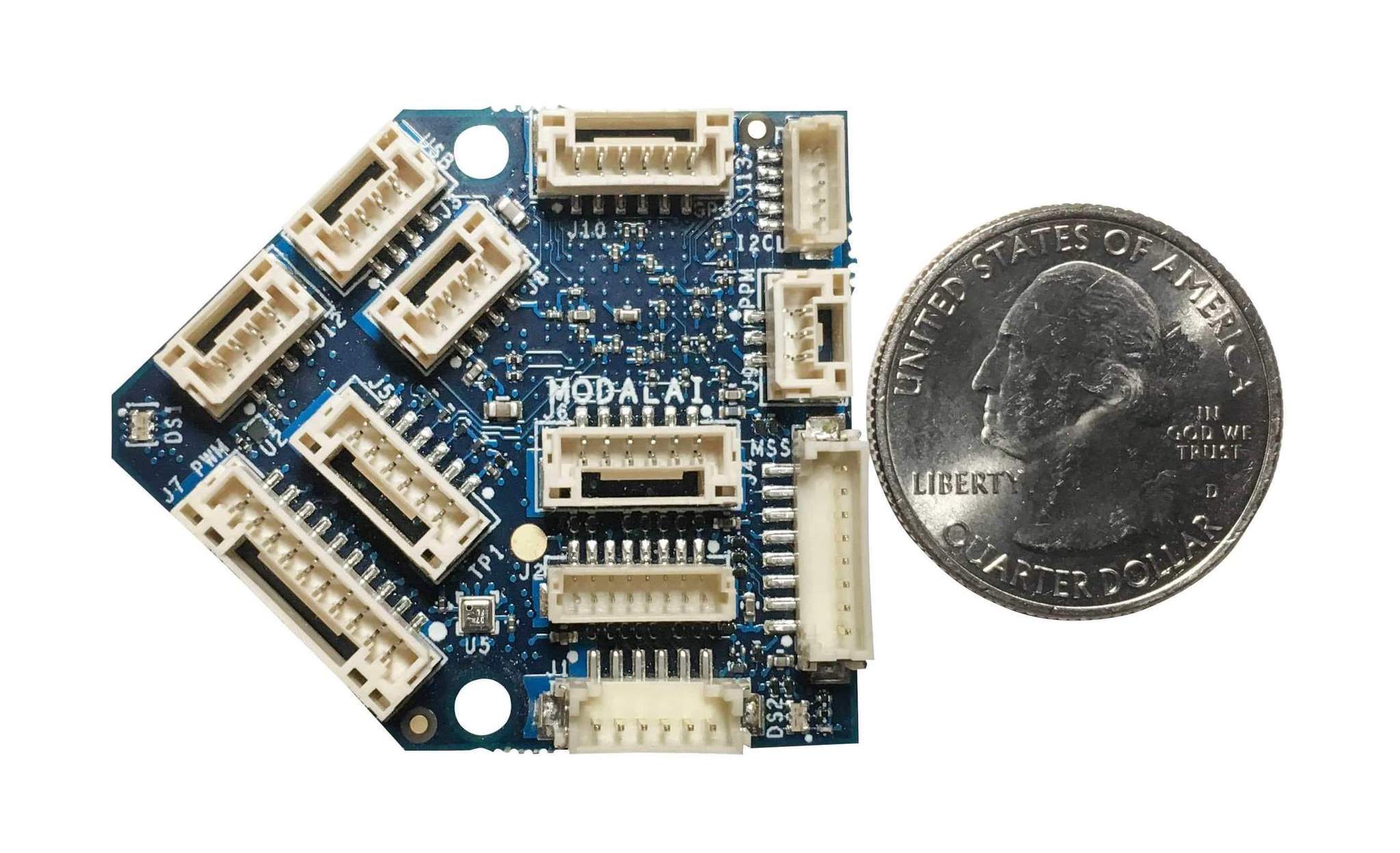
Flight Core ідентичний з частиною контролера польоту PX4 VOXL Flight (Datasheet), яке інтегрує компаньйонний комп'ютер VOXL та Flight Core в одну плату.
Цей контролер польоту підтримується виробником.
Специфікація
| Характеристика | Подробиці |
|---|---|
| Вага | 6 г |
| MCU | 216MHz, 32-bit ARM M7 STM32F765II |
| Пам'ять | 256Kb FRAM |
| 2Mbit Flash | |
| 512Kbit SRAM | |
| Прошивка | PX4 |
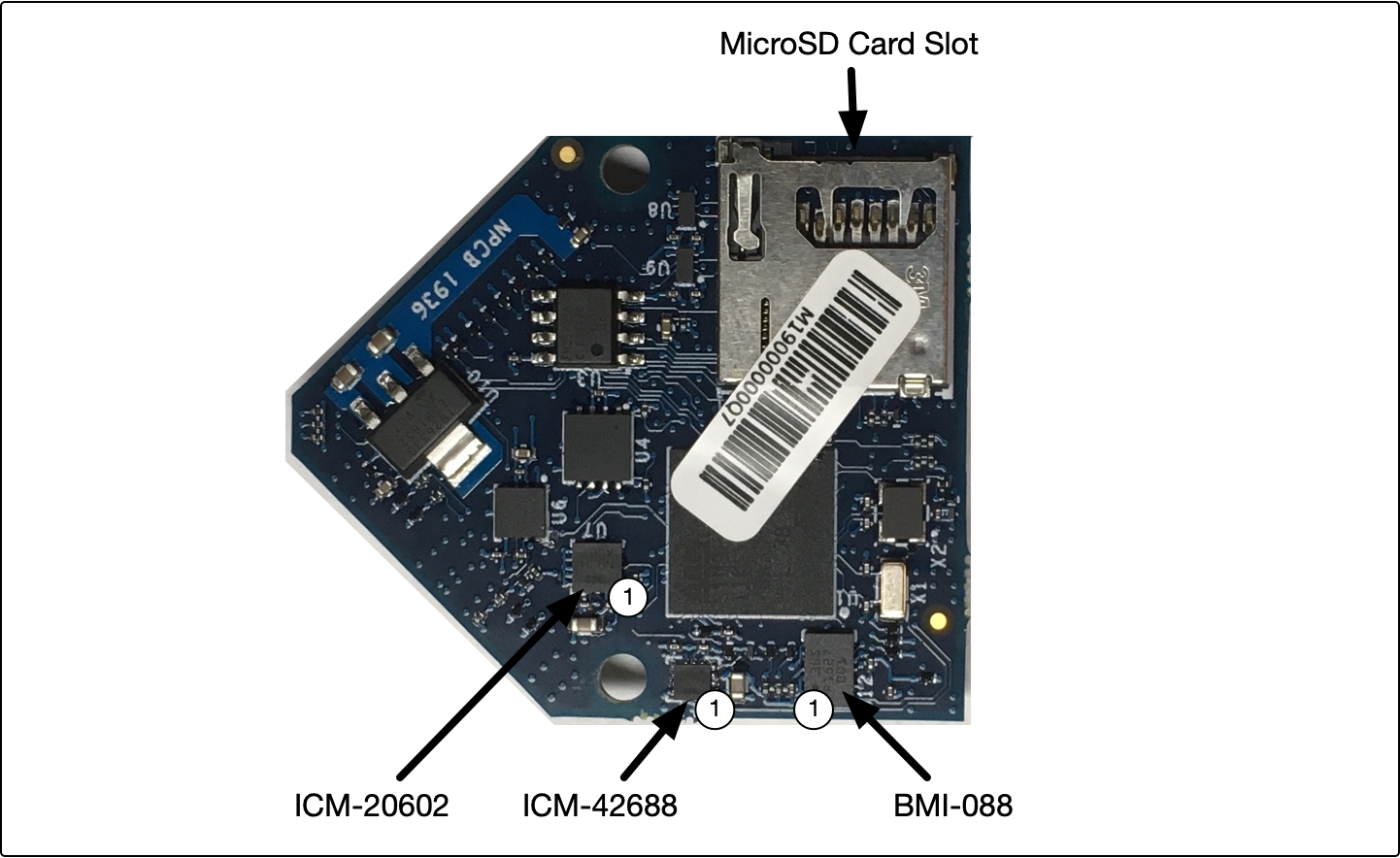
| IMUs | ICM-20602 (SPI1) |
| ICM-42688 (SPI2) | |
| BMI088 (SPI6) | |
| Барометр | BMP388 (I2C4) |
| Елемент захисту | A71CH (I2C4) |
| Карта microSD | Інформація про підтримувані картки |
| Вхідні дані | GPS/Mag |
| Spektrum | |
| Телеметрія | |
| CAN шина | |
| PPM | |
| Виводи | 6 світлодіодів (2xRGB) |
| 8 каналів PWM | |
| Додаткові Інтерфейси | 3 послідовні порти |
| I2C | |
| GPIO |
::: інформація Докладнішу документацію щодо апаратного забезпечення можна знайти тут. :::
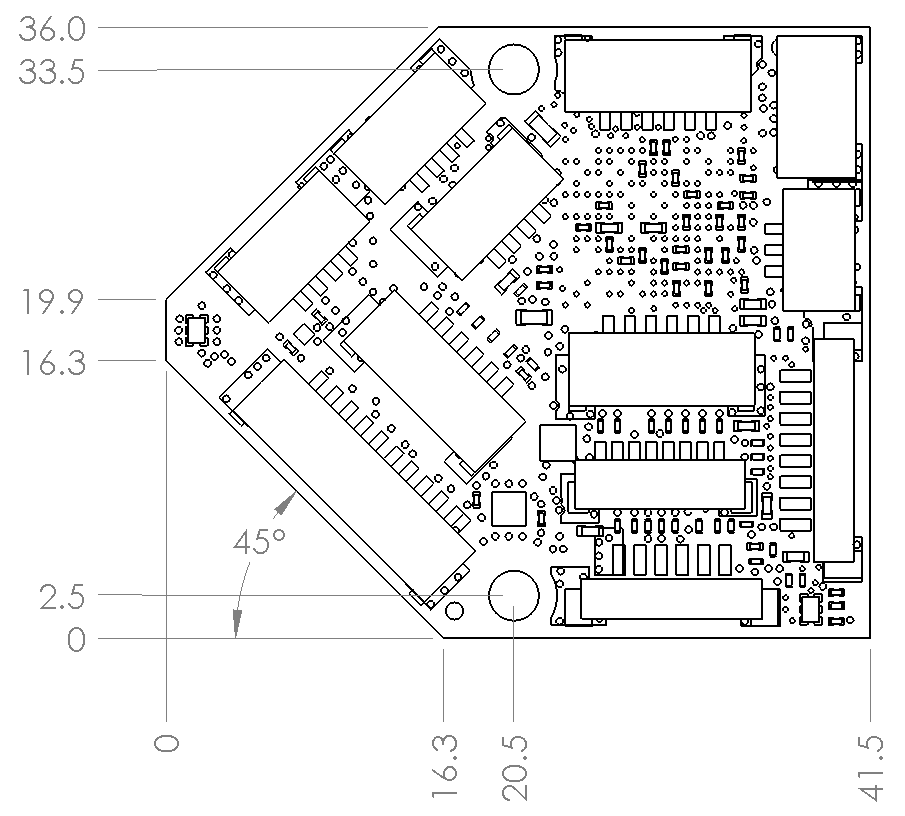
Розміри
Сумісність прошивки PX4
Flight Core v1 повністю сумісний з офіційною прошивкою PX4 від PX4 v1.11.
ModalAI підтримує гілку версії PX4 для PX4 v1.11. Це включає підтримку UART ESC та поліпшення в VIO та VOA, які планується включити в основний код.
Додаткову інформацію про прошивку можна знайти тут.
QGroundControl Підтримка
Ця плата підтримується QGroundControl 4.0 та пізнішими версіями.
Доступність
- Повний комплект Flight Core
- Flight Core інтегрований з супутнім комп'ютером VOXL на одній платі
- Flight Core, інтегроване з комп'ютером-компаньйоном VOXL та камерами уникання перешкод (VOXL Flight Deck) (Datasheet)
- Flight Core, складений з VOXL та камерами
Швидкий Старт
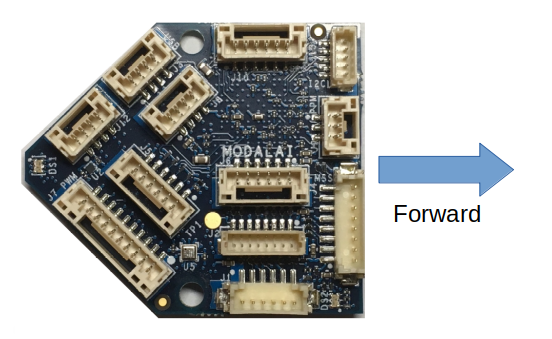
Орієнтація
Діаграма нижче показує рекомендовану орієнтацію, яка відповідає ROTATION_NONE починаючи з PX4 v1.11.
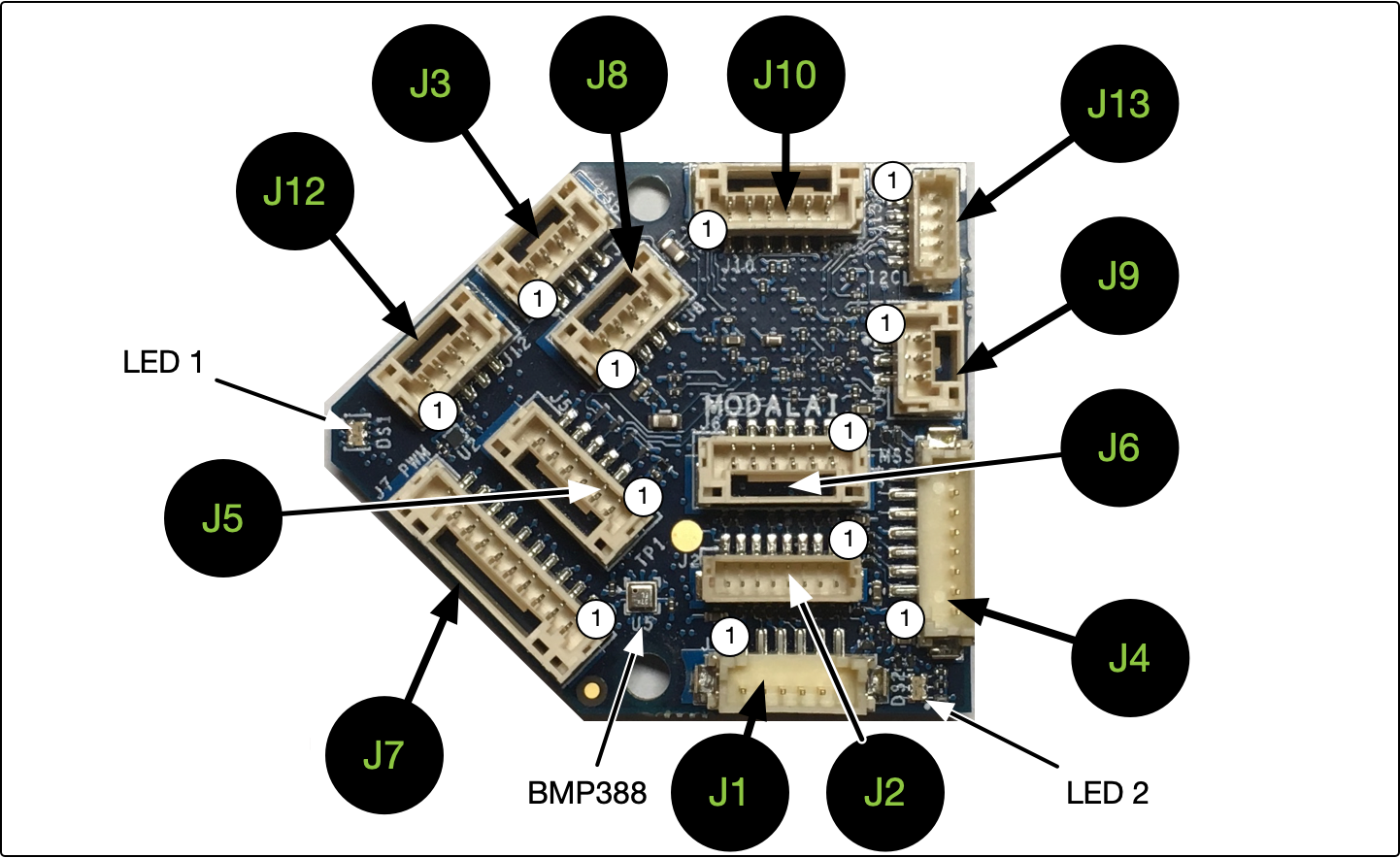
З’єднання
Детальну інформацію про роз'єми можна знайти тут.
| З’єднання | Опис |
|---|---|
| J1 | Роз'єм інтерфейсу зв'язку VOXL (TELEM2) |
| J2 | Програмний та відлагоджувальний роз'єм |
| J3 | USB конектор |
| J4 | UART2, UART ESC (TELEM3) |
| J5 | Конектор телеметрії (TELEM1) |
| J6 | Введенням VOXL-Power Management / розширення |
| J7 | Роз'єм виводу з 8 каналами PWM |
| J8 | Конектор шини CAN |
| J9 | PPM RC In |
| J10 | Зовнішній коннектор GPS & магнітометра |
| J12 | Вхід RC, Spektrum/SBus/UART конектор |
| J13 | I2C Дисплей (роз'єм запасного датчика) / Вхід кнопки безпеки |
Посібник користувача
Повний посібник користувача доступний тут.
Як зібрати
Щоб зібрати PX4 для цього контролера:
make modalai_fc-v1Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 (J10) |
| USART2 | /dev/ttyS1 | TELEM3 (J4) |
| USART3 | /dev/ttyS2 | Консоль відлагодження (J2) |
| UART4 | /dev/ttyS3 | Розширення UART (J6) |
| UART5 | /dev/ttyS4 | TELEM2, Основні зв'язки VOXL (J1) |
| USART6 | /dev/ttyS5 | RC (J12) |
| UART7 | /dev/ttyS6 | TELEM1 (J5) |
| UART8 | /dev/ttyS7 | N/A |
Підтримка
Будь ласка, відвідайте ModalAI Forum для отримання додаткової інформації.