Режим повернення (типовий транспорт)
")
Режим польоту Return використовується для повернення транспортного засобу до безпеки по вільному шляху до безпечного пункту призначення, де він повинен приземлитися.
Наступні теми слід прочитати першими, якщо ви використовуєте ці типи транспортних засобів:
:::note
- Режим автоматичний - для керування автомобілем не потрібно втручання користувача.
- Режим вимагає глобальної тривимірної оцінки позиції (з GPS або виведеної з локальної позиції).
- Літаючі апарати не можуть перемикатися в цей режим без глобальної позиції.
- Літаючі транспортні засоби будуть аварійно переходити в безпечний режим, якщо втрачають оцінку позиції.
- Режим вимагає встановленої домашньої позиції.
- Режим перешкоджає взброєнню (транспортний засіб повинен бути включеним при переході в цей режим).
- Перемикачі керування RC можна використовувати для зміни режимів польоту на будь-якому автомобілі.
- Рух палиць дистанційного керування в багатороторному літальному апараті (або ВТОЛ у режимі багатороторного літання) за замовчуванням змінить режим транспортного засобу на режим позиції, якщо не виникне критична аварія батареї.
- VTOL повернеться як MC або FW на основі свого режиму в точці, коли режим повернення було запущено. У режимі багтороторного літання він буде дотримуватися параметрів багтороторного літання, таких як "конус" посадки. У режимі ФПВ він буде дотримуватися параметрів фіксованого крила (ігнорувати конус), але, якщо не використовується місійна посадка, перейде в режим багтороторного літання та посадиться у пункт призначення після нависання на висоті спуску.
:::
Загальний огляд
PX4 надає кілька механізмів для вибору безпечного шляху повернення, пункту призначення та посадки, включаючи використання домашнього місця, точок ралі ("безпечні"), шляхів місії та послідовностей посадки, визначених у місії.
Усі транспортні засоби нормально підтримують всі ці механізми, проте не всі з них мають такий же сенс для певних транспортних засобів. Наприклад, багатокоптер може приземлитися практично будь-де, тому використання послідовності посадки для нього не має сенсу, крім випадків, які трапляються рідко. Так само, фіксований крилообразний транспортний засіб повинен пролетіти безпечний шлях до посадки: він може використовувати домашнє місце як точку повернення, але за замовчуванням не буде намагатися приземлитися на ньому.
Ця тема охоплює всі можливі типи повернення, які будь-який транспортний засіб може бути налаштований використовувати — теми про режими повернення для кожного конкретного транспортного засобу включають тип та конфігурацію повернення за замовчуванням/рекомендовану для кожного транспортного засобу.
Наступні розділи пояснюють, як налаштувати тип повернення, мінімальну висоту повернення та поведінку під час посадки/прибуття.
Типи повернень (RTL_TYPE)
PX4 надає чотири альтернативні підходи для пошуку безперешкодного шляху до безпечного пункту призначення та/або посадки, які встановлюються за допомогою параметра RTL_TYPE.
На високому рівні є:
- Повернення до дому/точки ралі (
RTL_TYPE=0): Підняття на безпечну висоту та повернення за прямим шляхом до найближчої точки ралі або дому. - Повернення за місією до точки посадки/точки ралі (
RTL_TYPE=1): Підняття на безпечну висоту, прямий політ до найближчої точки призначення окрім дому: точки ралі або початку посадки за місією. Якщо не визначено пунктів посадки або збору місії, поверніться додому прямим шляхом. - Повернення за маршрутом місії (
RTL_TYPE=2): Використання маршруту місії та швидке продовження до посадки за місією (якщо визначено). Якщо місія приземлення не визначена, швидко повертайте місію додому. Якщо не визначено місію, повернення відбувається безпосередньо до дому (точки ралі ігноруються). - Повернення до найближчого безпечного місця призначення (
RTL_TYPE=3): Підняття на безпечну висоту та повернення за прямим шляхом до найближчого місця призначення: дому, початку маршруту посадки за місією або точки ралі. Якщо пунктом призначення є схема приземлення, дотримуйтеся цієї схеми, щоб приземлитися.
Більш детальні пояснення щодо кожного з типів наведено в наступних розділах.
Тип повернення додому/точка збору (RTL_TYPE=0)
Це типовий тип повернення для мультикоптера (див. тему для отримання більш детальної інформації).
У цьому типі повернення транспортний засіб:
- Піднімається на безпечну мінімальну висоту повернення (над будь-якими очікуваними перешкодами).
- Летить прямою траєкторією до вихідної позиції або точки збору (залежно від того, що ближче)
- Після прибуття опускається до «висоти спуску» та чекає встановленого часу. Цей час можна використати для розгортання шасі для посадки.
- Сідає або чекає (це залежить від параметрів посадки), За замовчуванням БПЛА або ВТОЛ у режимі БПЛА приземлятиметься, а повітряне судно з фіксованим крилом обертатиметься на висоті спуску. ВТОЛ у режимі FW вирівнює свою орієнтацію на точку призначення, переходить у режим МБ і потім приземлюється.
:::note Якщо не визначено точки ралі, це те ж саме, що і Повернення до старту (RTL)/Повернення додому (RTH). :::
Тип посадки/повернення точки збору (RTL_TYPE=1)
Це типовий тип повернення для літака з фіксованим крилом або VTOL (див. теми для отримання додаткової інформації).
У цьому типі повернення транспортний засіб:
- Піднімається на безпечну мінімальну висоту повернення (вище будь-яких очікуваних перешкод), якщо потрібно. Транспортний засіб підтримує свою початкову висоту, якщо вона вище, ніж мінімальна висота повернення.
- Летить за прямим постійним шляхом на точку ралі або на початок шаблону посадки місії (найближчого). Якщо місця посадки або збору не визначені, транспортний засіб повертається додому прямим шляхом.
- Якщо призначення - це шаблон посадки місії, воно буде слідувати за шаблоном для посадки.
- Якщо місце призначення - це точка ралі або дім, воно приземлиться або зачекає на висоті спуску (в залежності від параметрів посадки). За замовчуванням багатороторні квадрокоптери або вертикально-взлітно-посадкові літаки в режимі багатороторника приземлюються, а фіксованокрилі літаки обертаються на висоті спуску. VTOL у режимі FW вирівнює свій курс до точки призначення, переходить в режим MC, а потім приземлюється.
:::note Для фіксованих крил зазвичай також встановлюється параметр MIS_TKO_LAND_REQ який вимагає патерн посадки за місією. :::
Тип повернення маршруту завдання (RTL_TYPE=2)
Цей тип повернення використовує місію (якщо вона визначена) для надання безпечного шляху повернення та шаблон посадки місії (якщо визначено) для забезпечення посадкової поведінки. Якщо є місія, але немає посадкового шаблону, місія летить у зворотному напрямку. Точки ралі, якщо вони є, ігноруються.
:::note Поведінка є досить складною, оскільки вона залежить від режиму польоту та наявності визначеної місії та посадкової місії. :::
Місія з посадковим шаблоном:
- Режим місії: Місія продовжується у "режимі прискореного перемотування" (переходи, затримки та будь-які інші команди, що не стосуються позиції, ігноруються, точки затримки та інші позиційні точки перетворюються на прості точки) і потім здійснює посадку.
- Автоматичний режим, окрім режиму місії:
- Підніміться до безпечної мінімальної висоти повернення вище будь-яких очікуваних перешкод.
- Летіть безпосередньо до найближчої точки маршруту (для FW - не посадкової точки) і знижуйтеся до висоти точки маршруту.
- Продовжуйте місію в режимі швидкої відтворення з цієї точки маршруту.
- Ручний режим:
- Підняття на безпечну мінімальну висоту повернення вище будь-яких очікуваних перешкод.
- Прямий польот до позиції послідовності посадки та спуск до висоти позначеної точки
- Приземлення з використанням місійного шаблону посадки
Місія з посадковим шаблоном:
- Режим місії:
- Місія виконується "швидко назад" (у зворотному напрямку) починаючи з попередньої точки маршруту
- Переходи, затримки та будь-які інші команди, що не стосуються позиції, ігноруються. Точки залишку та інші позиційні точки перетворюються на прості точки маршруту.
- Транспортні засоби VTOL переходять у режим FW (за потреби) перед тим, як летіти місію задом наперед.
- При досягненні пункту маршруту 1 транспортний засіб піднімається на мінімальну висоту повернення і летить до домашньої позиції (де він приземлюється або очікує).
- Місія виконується "швидко назад" (у зворотному напрямку) починаючи з попередньої точки маршруту
- Режим автопілота, відмінний від режиму місії:
- Летіти безпосередньо до найближчої точки маршруту (для фіксованого крила не є пунктом посадки) і спуститися на висоту цієї точки.
- Продовжуйте місію у зворотному напрямку, точно так само, як буде активовано режим Повернення у режимі місії (див. вище)
- Ручні режими: Політайте безпосередньо до домашньої локації та приземляйтесь.
Якщо місія не визначена, PX4 буде летіти безпосередньо до домашньої локації та приземлиться (точки ралі ігноруються).
Якщо місія змінюється під час режиму повернення, тоді поведінка повторно оцінюється на основі нової місії за тими ж правилами, що й вище (наприклад, якщо нова місія не має послідовності приземлення, а ви в місії, місія змінюється).
Тип повернення додому/точка збору (RTL_TYPE=3)
У цьому типі повернення транспортний засіб:
- Піднімається на безпечну мінімальну висоту повернення (вище будь-яких очікуваних перешкод).
- Летить прямо до найближчої точки призначення: домашньої локації, шаблону посадки місії або точки ралі.
- Якщо місце призначення - це шаблон посадки місії, транспортний засіб буде дотримуватися шаблону для посадки.
- Якщо місце призначення - це домашнє місце або точка ралі, транспортний засіб спускається на висоту спуску (RTL_DESCEND_ALT) і потім посаджується або чекає. За замовчуванням, квадрокоптер або ВТЛ у режимі квадрокоптера приземлиться, а літак кружлятиме на висоті спуску. Вертикальний злітно-посадковий апарат VTOL у режимі FW вирівнює свій курс до пункту призначення, переходить у режим MC, а потім приземляється.
Мінімальна висота повернення
Для більшості типів повернення транспортний засіб підніматиметься до мінімальної безпечної висоти перед поверненням (якщо вже не перебуває вище цієї висоти), щоб уникнути перешкод між ним і місцем призначення.
:::note Виняток становить виконання повернення за маршрутом місії з меж місії. У цьому випадку транспортний засіб слідує точкам маршруту місії, які ми припускаємо, що сплановані таким чином, щоб уникнути будь-яких перешкод. :::
Повернення на висоту для літака або ВТОЛ-транспортного засобу в режимі фіксованого крила налаштовується за допомогою параметра RTL_RETURN_ALT (не використовує код, описаний у наступному пункті).
Повернення на висоту для багатокоптерів або ВТОЛ-транспортних засобів у режимі MC налаштовується за допомогою параметрів RTL_RETURN_ALT та RTL_CONE_ANG, які визначають пів-конус, центрований навколо пункту призначення (домашнього місця або безпечної точки).
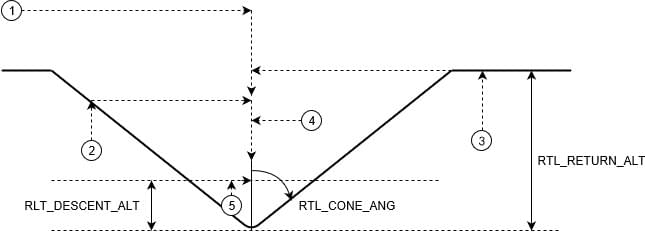
Якщо транспорт є:
- Вище RTL_RETURN_ALT (1) він повернеться на своїй поточній висоті.
- Нижче конуса він повернеться туди, де він перетинається з конусом (2) або RTL_DESCEND_ALT (яка б вища).
- Поза конусом (3) спочатку підніметься до досягнення RTL_RETURN_ALT.
- У межах конуса:
- Вище RTL_DESCEND_ALT (4) він повернеться на свою поточну висоту.
- Нижче RTL_DESCEND_ALT (5) спочатку він підніметься до
RTL_DESCEND_ALT.
Примітка:
- Якщо кут RTL_CONE_ANG дорівнює 0 градусам, то "конуса" немає:
- транспортний засіб повертається на висоту
RTL_RETURN_ALT(або вище).
- транспортний засіб повертається на висоту
- Якщо RTL_CONE_ANG дорівнює 90 градусам, транспортний засіб повертатиметься на велику висоту, ніж
RTL_DESCEND_ALT, та на поточну висоту. - Транспортний засіб завжди підніметься принаймні на висоту RTL_DESCEND_ALT для повернення.
Посадка в пункті призначення
Крім випадків, коли виконується шаблон посадки місії як частина режиму повернення, транспортний засіб прибуде до пункту призначення і швидко опуститься до висоти RTL_DESCEND_ALT, де він буде кружляти протягом RTL_LAND_DELAY, перед посадкою. Якщо RTL_LAND_DELAY=-1, він буде багато часу кружляти.
Конфігурація за замовчуванням для посадки залежить від типу транспортного засобу:
- Багтороторні літальні апарати налаштовані на коротку паузу в горизонтальному положенні, розкладаючи стійки посадкової шасі за потреби, а потім сідають.
- Літальні апарати з фіксованим крилом використовують режим повернення з шаблоном посадки місії, оскільки це дозволяє автоматизовану посадку. Якщо не використовується посадка за допомогою місії, конфігурація за замовчуванням полягає в нескінченному обертанні, щоб користувач міг взяти керування власноруч і виконати посадку.
- VTOLи в режимі MC літають і сідають точно так само, як багтороторний вертоліт.
- VTOLи в режимі FW рухаються до точки посадки, переходять у режим MC, а потім сідають на місце призначення.
Схема посадки місії
Шаблон посадки місії - це шаблон посадки, визначений як частина плану місії. Це включає в себе MAV_CMD_DO_LAND_START, одне або кілька позиційних точок маршруту та MAV_CMD_NAV_LAND (або MAV_CMD_NAV_VTOL_LAND для VTOL-транспортного засобу).
Посадкові маршрути, визначені в місіях, - це найбезпечніший спосіб автоматично посадити літак з фіксованими крилами на PX4. З цієї причини повітряні судна фіксованого крила налаштовані на використання Посадку/повернення на пункт ралі/вильоту місії за замовчуванням.
Параметри
Параметри RTL наведено в Довідці параметрів > Режим повернення (і підсумовано нижче).
| Параметр | Опис |
|---|---|
| RTL_TYPE | Механізм повернення (шлях і місце призначення). 0: Повернення до точки ралі або додому (яка ближче) за прямим маршрутом. 1: Повернення до точки ралі або початкової точки місії посадки (яка ближче) за прямим маршрутом. Якщо не визначено ні місійної посадки, ні точок ралі, повертайтеся додому через прямий шлях. Якщо місія включає посадковий маршрут, слідуємо маршруту для посадки. 2: Використовуйте шлях місії, щоб швидко перейти до посадки, якщо визначений посадковий маршрут, в іншому випадку швидко повертайтеся додому. Ігноруємо точки ралі. Летіти прямо додому, якщо не визначено жодного плану місії. 3: Повертатися прямим шляхом до найближчої точки призначення: дому, початку шаблону посадки місії або безпечної точки. Якщо місце призначення - це шаблон посадки місії, дотримуйтеся шаблону для посадки. |
| RTL_RETURN_ALT | Return altitude в метрах (за замовчуванням: 60 м), коли RTL_CONE_ANG дорівнює 0. Якщо вже вище цієї величини, транспортний засіб повернеться на поточну висоту. |
| RTL_DESCEND_ALT | Мінімальна висота повернення і висота, на якій повітряне судно сповільнює або зупиняє своє початкове зниження з вищої висоти повернення (за замовчуванням: 30 м) |
| RTL_LAND_DELAY | Час очікування на висоті RTL_DESCEND_ALT перед посадкою (за замовчуванням: 0.5 с) - за замовчуванням цей період короткий, щоб транспортний засіб просто сповільнився, а потім враз відразу приземлився. Якщо встановлено значення -1, система буде кружляти на висоті RTL_DESCEND_ALT замість посадки. Затримка надається для того, щоб ви могли налаштувати час для розгортання шасі для посадки (автоматично спрацьовує). |
| RTL_MIN_DIST | Мінімальна горизонтальна відстань від домашньої позиції, щоб викликати підйом на висоту повернення, вказану "конусом". Якщо транспортний засіб горизонтально ближче, ніж ця відстань до дому, він повернеться на свою поточну висоту або RTL_DESCEND_ALT (вище з двох) замість того, щоб спочатку підніматися на RTL_RETURN_ALT. |
| RTL_CONE_ANG | Половина кута конуса, який визначає висоту повернення ВСП до домашньої позиції (RTL). Значення (у градусах): 0, 25, 45, 65, 80, 90. Зауважте, що 0 означає "без конуса" (завжди повертатися на RTL_RETURN_ALT або вище), тоді як 90 вказує на те, що транспортний засіб повинен повертатися на поточну висоту або RTL_DESCEND_ALT (яка вища). |
| COM_RC_OVERRIDE | Контролює, чи рух палиць на багтрековому літальному апараті (або VTOL у режимі MC) викликає зміну режиму на Режим позиціонування (крім випадку, коли транспортний засіб вирішує критичне аварійне вимкнення батареї). Це можна окремо увімкнути для автоматичних режимів та для режиму поза бортом, і в автоматичних режимах воно включено за замовчуванням. |
| COM_RC_STICK_OV | Кількість рухів стиків, яка викликає перехід у режим Положення (якщо COM_RC_OVERRIDE увімкнено). |
| RTL_LOITER_RAD | [Тільки фіксований крило] Радіус круга обертання (у значенні RTL_LAND_DELAY). |
| MIS_TKO_LAND_REQ | Вкажіть, чи потрібна місія для посадки або злітної траєкторії необхідна. Загалом, фіксованокрилі транспортні засоби встановлюють це для вимагання патерну посадки, але ВТОЛ цього не роблять. |