Режим місії (Мультикоптер)
")
Режим місії змушує транспортний засіб виконувати передбачений автономний план місії (план польоту), який був завантажений до керуючого пристрою польоту. Зазвичай місія створюється та завантажується за допомогою програми для керування наземною станцією (GCS), такої як QGroundControl (QGC).
INFO
- Для цього режиму потрібна глобальна оцінка 3D-позиції (за допомогою GPS або виведеної з локальної позиції).
- Транспортний засіб повинен бути озброєний перед тим, як цей режим може бути активований.
- Цей режим є автоматичним - для керування транспортним засобом не потрібне втручання користувача.
- Перемикачі керування RC можуть бути використані для зміни режимів польоту на будь-якому транспортному засобі.
- Рух палиць дистанційного керування буде за замовчуванням змінювати транспортний засіб на режим позиції, якщо не виникне критична аварія батареї. Це справжнє для багтороторів і ВПС у режимі КУ.
Опис
Місії зазвичай створюються в земній контрольній станції (наприклад, QGroundControl) та завантажуються перед запуском. Вони також можуть бути створені за допомогою розробника API або завантажені під час польоту.
Індивідуальні команди місії обробляються таким чином, який є відповідним для характеристик багтороторного польоту (наприклад, обертання виконується у вигляді залишання на місці).
INFO
Місії завантажуються на SD-карту, яку потрібно вставити перед запуском автопілота.
На високому рівні всі типи транспортних засобів ведуть себе однаково, коли ввімкнено режим МІСІЯ:
Якщо місія не збережена, або якщо PX4 завершив виконання всіх команд місії, або якщо місія не є можливою:
- Якщо літає транспортний засіб, він буде утримувати.
- Якщо посадять транспортний засіб, він буде "чекати".
Якщо місія збережена, а PX4 летить, вона виконає місію / план польоту з поточного кроку.
- Пункт
TAKEOFFтрактується як звичайна точка місії.
- Пункт
Якщо місія збережена і PX4 приземлився:
- PX4 виконає місію/план польоту.
- Якщо місія не має пункту
TAKEOFF, то PX4 підніме транспортний засіб на мінімальну висоту перед виконанням решти польотного плану з поточного кроку.
Якщо жодне завдання не збережено, або якщо PX4 завершив виконання всіх команд місії:
- Якщо літає транспортний засіб, він буде утримувати.
- Якщо посадять транспортний засіб, він буде "чекати".
Ви можете вручну змінити поточну команду місії, вибравши її в QGroundControl.
INFO
Якщо у вас є команда Перейти до елементу в місії, переміщення до іншого елементу не скине лічильник циклу. Однією з наслідків є те, що якщо ви зміните поточну команду місії на 1, це не призведе до "повного перезапуску" місії.
:::
Місія скине тільки тоді, коли транспортний засіб буде роззброєний або коли буде завантажена нова місія.
TIP
Щоб автоматично роззброїти транспортний засіб після посадки, у QGroundControl перейдіть до Налаштування Транспортного Засобу > Безпека, перейдіть до Налаштувань Режиму Посадки та позначте прапорець Роззброювати після. Введіть час очікування після посадки перед відброюванням транспортного засобу.
:::
Місії можна призупинити, переключившись з режиму місії на будь-який інший режим (наприклад, режим утримання або режим позиціонування), і продовжити, переключившись назад в режим місії. Якщо транспортний засіб не захоплював зображення, коли він був призупинений, під час відновлення він рухатиметься зі своєї поточної позиції до тієї ж точки шляху, до якої він спочатку рухався. Якщо транспортний засіб захоплював зображення (має елементи спуску камери), він замість цього рухатиметься зі своєї поточної позиції до останньої точки шляху, якою він проїхав (перед зупинкою), а потім пройде свій шлях з тією самою швидкістю та з такою самою поведінкою спуску камери. Це забезпечує, що планований шлях зафіксований під час місій з опитування/камери. Місію можна завантажити, коли транспортний засіб зупинений, у такому випадку поточний активний елемент місії встановлюється на 1.
INFO
Коли місію призупинено під час спрацювання камери на транспортному засобі, PX4 встановлює поточний активний пункт місії на попередню точку маршруту, так що при відновленні місії транспортний засіб буде повторювати свій останній етап місії. Крім того, PX4 зберігає останні застосовані пункти місії для налаштування швидкості та спуску камери (з вже покритого плану місії) та знову застосовує ці налаштування при відновленні місії.
WARNING
Переконайтеся, що палиця регулювання газу не дорівнює нулю перед переключенням в будь-який режим RC (інакше транспортний засіб розбився). Ми рекомендуємо вам вирівнювати ручки керування перед переходом до будь-якого іншого режиму.
Для отримання додаткової інформації про планування місії дивіться:
- Планування місії
- План Перегляду (Посібник користувача QGroundControl)
Перевірка можливості виконання місії
PX4 виконує деякі базові перевірки на розумність, щоб визначити, чи є місія можливою під час завантаження, і коли транспортний засіб вперше зброєний. Якщо будь-яка з перевірок не пройде успішно, користувач отримує повідомлення, і почати місію неможливо.
Підмножина найважливіших перевірок перерахована нижче:
- Перший пункт місії занадто далеко від транспортного засобу (MIS_DIST_1WP)
- Будь-який елемент місії конфліктує з планом або безпечним геозахистом
Налаштування підтримки QGroundControl
QGroundControl надає додаткову підтримку обробки місій на рівні GCS (на додачу до того, що надає контролер польоту).
Для отримання додаткової інформації дивіться:
Параметри місії
Поведінка місій залежить від ряду параметрів, більшість з яких задокументовані в Довідник параметрів > Місія. Дуже маленька підмножина наведені нижче.
Загальні параметри:
| Параметр | Опис |
|---|---|
| NAV_RCL_ACT | Режим аварійного відновлення зв'язку RC (що робить транспортний засіб, якщо втрачає зв'язок RC) - наприклад, увійти в режим утримання, режим повернення, завершити тощо. |
| COM_RC_OVERRIDE | Контролює переміщення джойстика на мультикоптері (або конвертоплані у режимі MC) повертає керування пілоту в Режим положення. Це можна окремо увімкнути для автоматичних режимів та для режиму поза бортом, і в автоматичних режимах воно включено за замовчуванням. |
| COM_RC_STICK_OV | Кількість рухів стиків, яка викликає перехід у режим Положення (якщо COM_RC_OVERRIDE увімкнено). |
Параметри, пов'язані з перевірками можливостей місії:
| Параметр | Опис |
|---|---|
| MIS_DIST_1WP | Місія не буде розпочата, якщо поточна точка шляху віддаленіша від домашньої позиції, ніж це значення. Вимкнено, якщо значення дорівнює 0 або менше. |
| FW_LND_ANG | Максимальний кут нахилу для посадки. |
| MIS_TKO_LAND_REQ | Конфігурація вимоги для зльоту/посадки місії. FW та VTOL обидва мають його задано на 2 за замовчуванням, що означає, що місія повинна містити посадку. |
Команди місій
PX4 "приймає" наступні команди місії MAVLink у режимі Місії (з деякими попередженнями, які наведені після списку). Якщо не вказано інше, реалізація відповідає визначенню у специфікації MAVLink.
Предмети місії:
- MAV_CMD_NAV_WAYPOINT
- Param3 (проліт) ігнорується. Flythrough завжди ввімкнено, якщо param 1 (time_inside) > 0.
- MAV_CMD_NAV_LOITER_UNLIM
- MAV_CMD_NAV_LOITER_TIME
- MAV_CMD_NAV_LAND
- MAV_CMD_NAV_TAKEOFF
- MAV_CMD_NAV_LOITER_TO_ALT
- MAV_CMD_DO_JUMP
- MAV_CMD_NAV_ROI
- MAV_CMD_DO_SET_ROI
- MAV_CMD_DO_SET_ROI_LOCATION
- MAV_CMD_DO_SET_ROI_WPNEXT_OFFSET
- MAV_CMD_DO_SET_ROI_NONE
- MAV_CMD_DO_CHANGE_SPEED
- MAV_CMD_DO_SET_HOME
- MAV_CMD_DO_SET_SERVO
- MAV_CMD_DO_LAND_START
- MAV_CMD_DO_TRIGGER_CONTROL
- MAV_CMD_DO_DIGICAM_CONTROL
- MAV_CMD_DO_MOUNT_CONFIGURE
- MAV_CMD_DO_MOUNT_CONTROL
- MAV_CMD_IMAGE_START_CAPTURE
- MAV_CMD_IMAGE_STOP_CAPTURE
- MAV_CMD_VIDEO_START_CAPTURE
- MAV_CMD_VIDEO_STOP_CAPTURE
- MAV_CMD_DO_SET_CAM_TRIGG_DIST
- MAV_CMD_DO_SET_CAM_TRIGG_INTERVAL
- MAV_CMD_SET_CAMERA_MODE
- MAV_CMD_NAV_DELAY
- MAV_CMD_NAV_RETURN_TO_LAUNCH
- MAV_CMD_DO_CONTROL_VIDEO
- MAV_CMD_DO_GIMBAL_MANAGER_PITCHYAW
- MAV_CMD_DO_GIMBAL_MANAGER_CONFIGURE
- MAV_CMD_OBLIQUE_SURVEY
- MAV_CMD_DO_SET_CAMERA_ZOOM
- MAV_CMD_DO_SET_CAMERA_FOCUS
- MAV_CMD_NAV_VTOL_TAKEOFF
MAV_CMD_NAV_VTOL_TAKEOFF.param2(заголовок переходу) ігнорується. Замість цього напрямок до наступної маршрутної точки використовується для переходу.
Визначення GeoFence
- MAV_CMD_NAV_FENCE_RETURN_POINT
- MAV_CMD_NAV_FENCE_POLYGON_VERTEX_INCLUSION
- MAV_CMD_NAV_FENCE_POLYGON_VERTEX_EXCLUSION
- MAV_CMD_NAV_FENCE_CIRCLE_INCLUSION
- MAV_CMD_NAV_FENCE_CIRCLE_EXCLUSION
Точки збору
INFO
Будь ласка, додайте звіт про проблему або PR, якщо ви знайшли відсутнє / некоректне повідомлення. :::info:
- PX4 аналізує вищезазначені повідомлення, але на них не обов'язково реагує. Наприклад, деякі повідомлення є специфічними для типу транспортного засобу.
- PX4 не підтримує локальні координати для команд місій (наприклад, MAV_FRAME_LOCAL_NED).
- Не всі повідомлення/команди доступні через QGroundControl.
- Список може стати застарілим, оскільки додаються повідомлення. Ви можете перевірити поточний набір, оглянувши код. Підтримка -
MavlinkMissionManager::parse_mavlink_mission_itemу /src/modules/mavlink/mavlink_mission.cpp.
Закруглені повороти: Траєкторія міжточкового маршруту
PX4 очікує пряму лінію від попередньої точки маршруту до поточної цілі (він не планує будь-якого іншого шляху між точками маршруту - якщо вам потрібен такий, ви можете симулювати це додаванням додаткових точок маршруту).
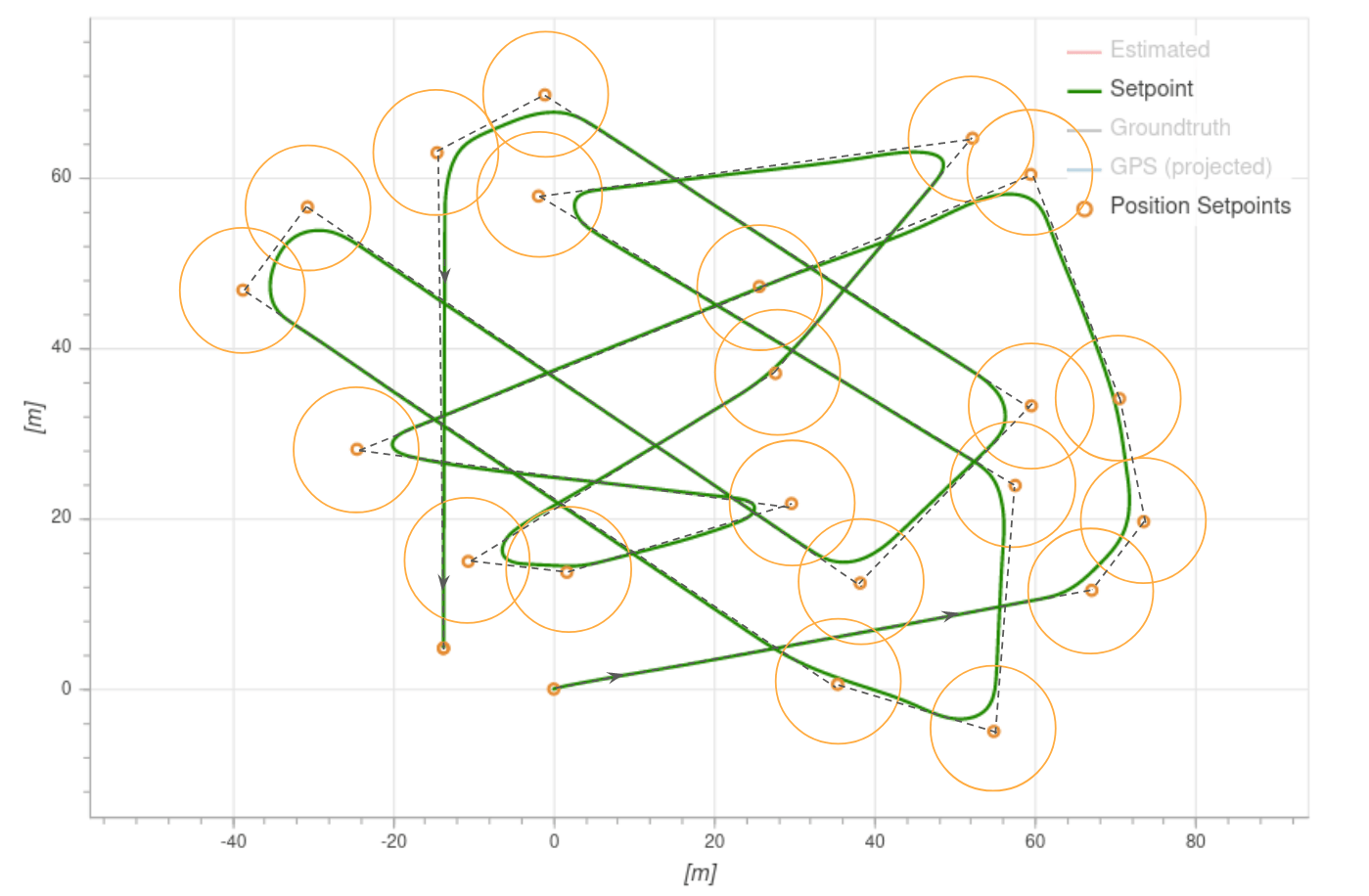
Технічні засоби керування MC будуть змінювати швидкість при наближенні або виходженні з точки відповідно до налаштувань обмеження ривків. Транспортний засіб буде рухатися по плавній закругленій кривій до наступної точки шляху (якщо вона визначена) визначеної радіусом прийняття (NAV_ACC_RAD). Діаграма нижче показує види шляхів, які ви можете очікувати.
Транспортні засоби переключаються на наступну точку шляху, як тільки вони потрапляють в радіус прийняття (NAV_ACC_RAD).
Місія зльоту
Заплануйте місію зльоту мультикоптера, додавши елемент місії TAKEOFF на карту (це відповідає MAV_CMD_NAV_TAKEOFF команді MAVLink).
Під час виконання цієї місії транспортний засіб підніметься вертикально до мінімальної висоти взяття на озброєння, визначеної в параметрі MIS_TAKEOFF_ALT, а потім рушить у напрямку 3D-позиції, визначеної у елементі місії.
Якщо місія без виконання завдань стартує, транспортний засіб підійде на мінімальну висоту взльоту, а потім перейде до першого елементу місії Waypoint.
Якщо транспортний засіб вже знаходиться в повітрі під час початку місії, місія зльоту розглядається як звичайний точка шляху.