Лідар LightWare SF1X/SF02/LW20
LightWare розробляє широкий спектр легких, загального призначення лазерних альтиметрів ("Lidar"), які підходять для установки на БПЛА. Ці інструменти корисні для застосувань, включаючи слідування за рельєфом, точне зависання у повітрі (наприклад, для фотографії), попередження про регуляторні висотні обмеження, антиколізійний датчик тощо.

Підтримувані плати
Наступні моделі підтримуються PX4 та можуть бути підключені до шини I2C або Serial (таблиці нижче показують, яку шину можна використовувати для кожної моделі).
Доступні
| Модель | Range (m) | Шина | Опис |
|---|---|---|---|
| SF11/C | 100 | Серійна або I2C шина | |
| LW20/C | 100 | Шина I2C | Водонепроникний (IP67) з сервоприводом для додатків з детекцією та уникненням перешкод |
Знято з виробництва
Наступні моделі більше не доступні від виробника.
| Модель | Діапазон | Шина |
|---|---|---|
| SF02 | 50 | Серія |
| SF10/A | 25 | Серійна або I2C шина |
| SF10/B | 50 | Серійна або I2C шина |
| SF10/C | 100m | Serial or I2C |
| LW20/B | 50 | I2C шина |
Налаштування I2C
Перевірте таблиці вище, щоб підтвердити, які моделі можна підключити до порту I2C.
Конфігурація Lidar
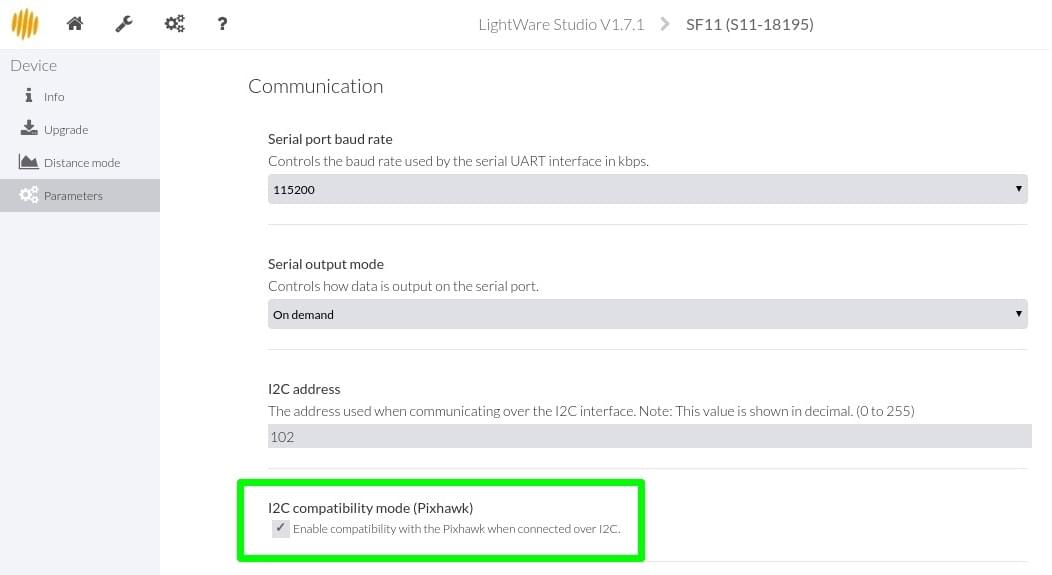
Цей апаратне забезпечення не поставляється з підтримкою сумісності з Pixhawk I2C за замовчуванням. Щоб увімкнути підтримку, вам потрібно завантажити LightWare Studio та перейти до Параметри > Зв'язок та встановити позначку Режим сумісності I2C (Pixhawk)
Апаратне забезпечення
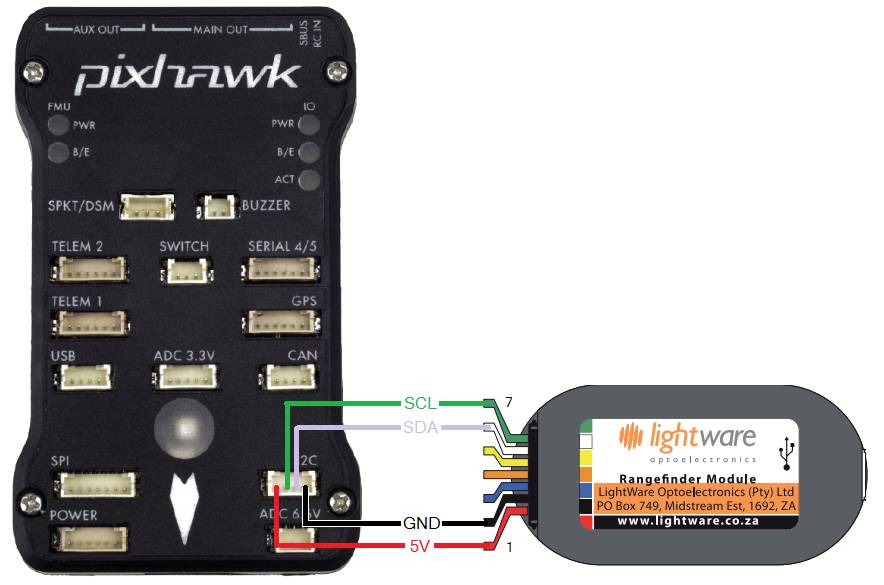
Підключіть Лідар до порту автопілота I2C, як показано нижче (у цьому випадку для Pixhawk 1).
:::note Деякі старі версії не можуть бути використані з PX4. Зокрема, вони можуть бути неправильно налаштовані на адресу I2C, рівну 0x55, що конфліктує з модулем rgbled. На системах Linux ви можете визначити адресу, використовуючи i2cdetect. Якщо адреса I2C дорівнює 0x66, сенсор може бути використаний з PX4. :::
Налаштування параметрів
Встановіть параметр SENS_EN_SF1XX для відповідності моделі дальноміра, а потім перезавантажте.
Серійне налаштування
Апаратне забезпечення
Лідар може бути підключений до будь-якого не використаного серійного порту (UART), наприклад: TELEM2, TELEM3, GPS2 тощо.
Налаштування параметрів
Налаштуйте послідовний порт, на якому буде працювати лідар, використовуючи SENS_SF0X_CFG. Немає потреби встановлювати швидкість передачі для порту, оскільки це налаштовано драйвером.
Якщо параметр конфігурації недоступний у QGroundControl, можливо, вам доведеться додати драйвер до мікропрограми.
Потім встановіть параметр SENS_EN_SF0X для відповідності моделі дальноміра та перезавантажте.