ThePeach FCC-K1
WARNING
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи питань відповідності вимогам.
ThePeach FCC-K1 - це просунутий автопілот, розроблений і виготовлений в ThePeach.
Вона базується на Pixhawk-проекті FMUv3 з відкритим апаратним забезпеченням і працює під управлінням PX4 на Nuttx OS.
Характеристики
Основний процесор: STM32F427VIT6
- 32-бітний ARM Cortex-M4, 168 МГц 256 КБ ОЗП 2 МБ флеш-пам'яті
IO процесор: STM32F100C8T6
- ARM Cortex-M3, 32 бітний ARM Cortex-M3, 24 МГц, 8КБ SRAM
Бортові сенсори
- Акселератор/гіроскоп: ICM-20602
- Акселератор/гіроскоп/Магнітометр: MPU-9250
- Барометр: MS5611
Інтерфейси
- 8+5 PWM виходів (8 з IO, 5 з FMU)
- Spektrum DSM / DSM2 / DSM-X Satellite сумісний вхід
- Futaba S.BUS сумісний вхід та вихід
- Вхід сигналу PPM sum
- Аналоговий / PWM вхід RSSI
- Вихід сервоприводу S.Bus
- Запобіжний вимикач / LED
- 4x Порти UART: TELEM1, TELEM2, GPS, SERIAL4
- 2x I2C порти
- 1x CAN шина
- 1x ADC
- Аналогові входи для напруги / струму з 1 батареї
Деталі механічної частини
- Розміри: 40.2 x 61.1 x 24.8 mm
- Вага: 65г
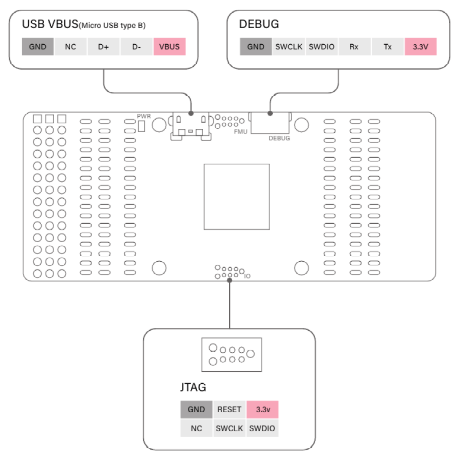
З’єднання
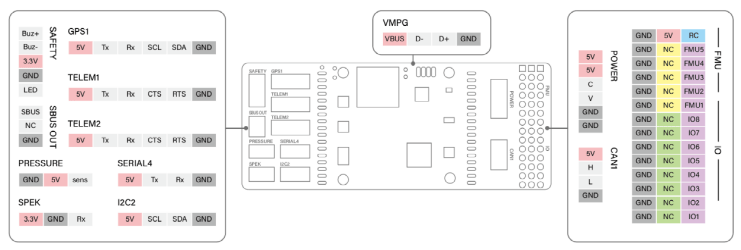
Зіставлення послідовних портів
| UART | Девайс | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | Відладка процесора вводу-виводу |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | Консоль відлагодження |
| UART8 | /dev/ttyS6 | TELEM4 |
Номінальна напруга
Peach FCC-K1 може мати подвійне резервування живлення, якщо до нього під'єднано два джерела живлення. Шини живлення: POWER та USB.
INFO
Вихідні шини живлення FMU PWM OUT і I/O PWM OUT не живлять плату контролера польоту (і не отримують від неї живлення). Ви повинні подати живлення на один з роз'ємів POWER або USB, інакше плата буде знеструмлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER вхід (5В до 5.5В)
- USB вхід (4.75В до 5.25В)
Абсолютна максимальна напруга
За таких умов всі джерела живлення спричиняють постійні пошкодження контролеру польоту.
- POWER вхід (більше 5.5В)
- USB вхід (більше 5.5В)
Збірка прошивки
Щоб зібрати PX4 для цього контролера:
jsx
make thepeach_k1_defaultДе купити
Замовляйте у ThePeach