PWM Сервопривод
Цей розділ пояснює, як підключити та налаштувати захоплювач, який керується виходом ШШП контролера польоту (серводією).

Підтримувані захвати
Наступні сервоприводи, підключені за допомогою ШІМ, були протестовані з PX4:
Підключення маніпулятора з керуванням ШІМ
Кабель ШІМ складається з трьох ліній: живлення, земля та сигнал. Типовий роз'єм показаний на зображенні нижче:
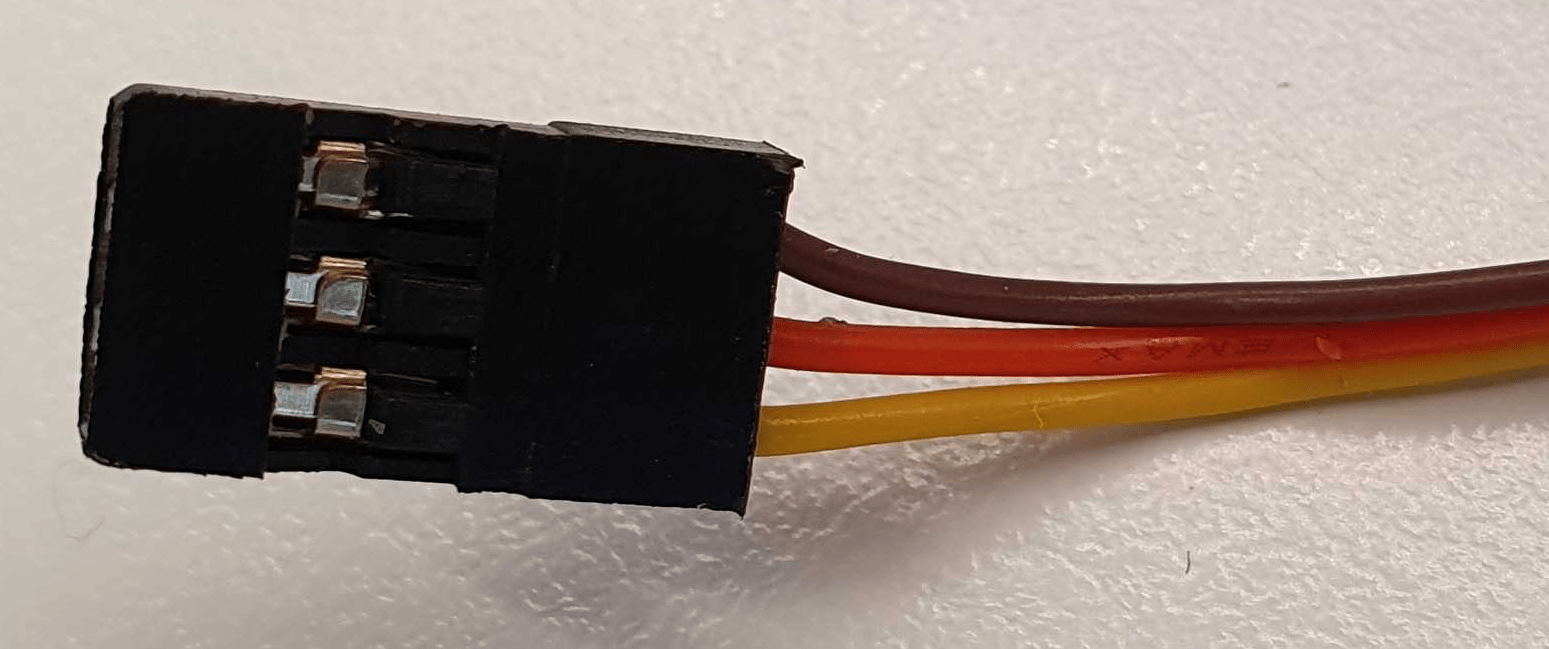
На зображенні вище кольори проводів мають наступні значення:
| Колір проводу | Ціль |
|---|---|
| Brown | Ground |
| Red | Power |
| Yellow | Сигнал PWM |
Вам потрібно буде підключити їх до відповідного входу PWM контролера польоту.
Перевірка сумісності
Перед підключенням кабелю перевірте наступні вимоги:
- Рівень напруги сигнальної лінії: Перевірте технічні характеристики механізму захвату, щоб знайти рівень напруги сигнальної лінії. І переконайтеся, що це сумісно з рівнем напруги контактів вашого контролера польоту.
- Вимоги до живлення захвата: Перевірте технічний опис механізму, щоб дізнатися вимоги до напруги живлення лінії. Залежно від цього, захоплювач може бути підключений безпосередньо до модуля живлення або підключений до лінії 5V. Також можна використовувати спеціалізований регулятор напруги для виведення будь-якої іншої необхідної напруги.
Конфігурація PX4
Інструкції з налаштування можна знайти в: Gripper > PX4 Configuration документації.
Зокрема, зверніть увагу, що серводатчик повинен бути відображений на вивід, як показано нижче.
Відображення активатора
PWM сервоприводи, та інші периферійні пристрої, які підключені безпосередньо до виходів PWM, повинні бути відображені на конкретні виходи під час Конфігурації приводів.
Це виконується шляхом призначення функції Gripper для вихідного порту, де підйомник підключений. Наприклад, на зображенні нижче призначається Gripper для виходу PWM AUX5.
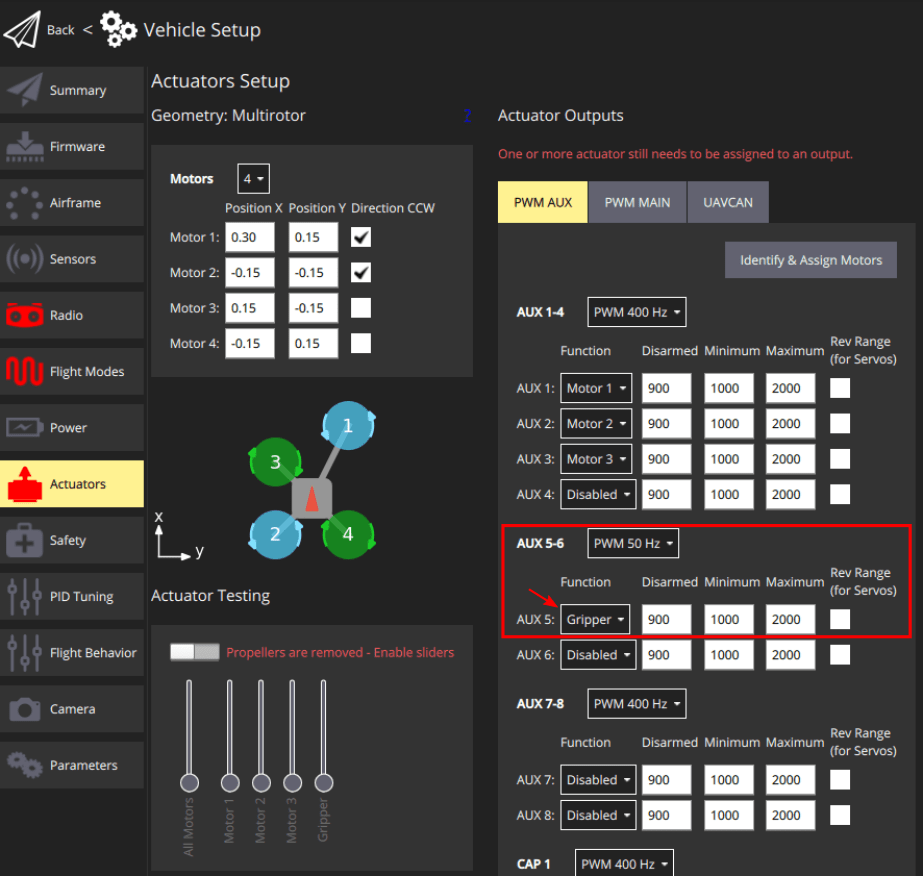
Вам також потрібно встановити правильну частоту ШІМ для вихідного порту захоплювача (для комерційних сервоприводів / захоплювачів це зазвичай 50 Гц).
INFO
Неправильна настройка частоти може пошкодити захват.
Повзунки в розділі Тестування приводів екрану конфігурації можуть бути використані для перевірки того, що відповідний вивід рухається, коли ви переміщуєте повзунок. Мінімальні та максимальні значення ШІМ повинні бути встановлені так, щоб сервопривід був повністю закритий у відключеному положенні і повністю відкритий в максимальному положенні слайдера.