Орбіта (Мультикоптер)

")
Мод керованого польоту Orbit дозволяє вам керувати багтротором (або VTOL у режимі багтротора) у кілі навколо певного місця, автоматично розвертаючись так, щоб завжди бути спрямованим на центр.
INFO
- Режим автоматичний - для керування автомобілем не потрібно втручання користувача.
- Режим потребує принаймні дійсної локальної оцінки позиції (не потребує глобальної позиції).
- Літаючі транспортні засоби не можуть переключатися на цей режим без глобального положення.
- Літаючі транспортні засоби перейдуть в режим аварійної безпеки, якщо втратять оцінку положення.
- Режим перешкоджає зброюванню (транспортний засіб повинен бути зброєний при переході на цей режим).
- Режим вимагає, щоб швидкість вітру та час польоту були в межах допустимих значень (вказано через параметри).
- Цей режим в даний час підтримується лише на багатокоптерних (або VTOL у режимі MC).
- Рух палиці RC може контролювати підйом/спуск та швидкість та напрямок оберту.
- Режим може бути викликаний за допомогою команди MAVLink MAV_CMD_DO_ORBIT.
Загальний огляд

QGroundControl (або інші сумісні GCS або MAVLink API) потрібно для увімкнення режиму, а також для встановлення центральної позиції, початкового радіусу та висоти орбіти. Після активації транспортний засіб полетить якнайшвидше до найближчої точки на запланованій траєкторії кола і виконає повільний (1 м/с) ходовий оберт навколо запланованого кола за годинниковою стрілкою, обертаючись до центру.
Інструкції з того, як почати орбіту, можна знайти тут: FlyView > Orbit Location (посібник QGroundControl).
INFO
Використання керування RC є необов'язковим. Якщо відсутній керування RC, орбіта буде продовжуватися, як описано вище. RC керування не може бути використане для запуску режиму (якщо ви перемикаєтеся на режим через RC, він буде просто працювати у мирі).
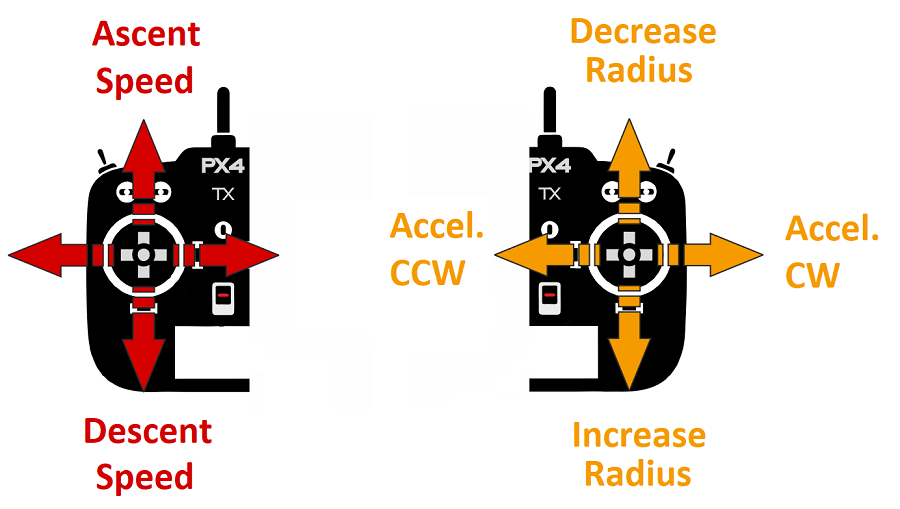
RC керування може бути використане для зміни висоти орбіти, радіусу, швидкості та напрямку обертання:
- Лівий джойстик:
- вгору/вниз: контролює швидкість підйому/спуску, як у режимі Положення. Коли в центрі мертвої зони, висота заблокована.
- ліворуч/праворуч: без ефекту.
- Лівий джойстик:
- ліворуч/праворуч: контролює прискорення орбіти у годинниковому/противогодинниковому напрямку. Коли центрується, поточна швидкість заблокована.
- Максимальна швидкість становить 10 м/с і подальше обмеження з метою збереження центростремального прискорення нижче 2 м/с².
- вгору/вниз: контролює радіус орбіти (менший/більший). Коли центрується, поточний радіус заблокований.
- Мінімальний радіус - 1м. Максимальний радіус становить 100 м.
- ліворуч/праворуч: контролює прискорення орбіти у годинниковому/противогодинниковому напрямку. Коли центрується, поточна швидкість заблокована.
Діаграма нижче візуально показує поведінку режиму (для передавача режиму 2).
Режим можна припинити, переключившись на будь-який інший режим польоту (використовуючи RC або QGC).
Параметри/Обмеження
Немає жодних параметрів, специфічних для режиму орбіти.
Наступні обмеження зафіксовані у вихідному коді:
- Початкове / типове обертання 1 м/с у годинному напрямку.
- Максимальне прискорення обмежено до 2 м/с^2, з пріоритетом на збереження командованої траєкторії кола, а не командованої швидкості на землі (тобто транспортний засіб сповільнюватиметься, щоб досягти правильного кола, якщо прискорення перевищує 2 м/с^2).
- Максимальний радіус - 100м.
Повідомлення MAVLink (розробники)
Режим орбіти використовує наступні команди MAVLink:
- MAV_CMD_DO_ORBIT - Розпочати орбіту з вказаною центральною точкою, радіусом, напрямком, висотою, швидкістю та напрямком yaw (транспортний засіб за замовчуванням повертається до центру орбіти).
- СТАН ВИКОНАННЯ ОРБІТИ - Статус орбіти, випущений під час оберту для оновлення GCS поточних параметрів орбіти (ці параметри можуть бути змінені контролером RC).