Holybro Pixhawk 4 Mini (Знято з виробництва)
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення або відповідності вимогам.
Автопілот Pixhawk® 4 Mini розроблений для інженерів та любителів, які прагнуть використовувати потужність Pixhawk 4, але працюють з меншими дронами. Pixhawk 4 Mini використовує FMU процесор та ресурси пам'яті Pixhawk 4, але виключає інтерфейси, які зазвичай не використовуються. Це дозволяє Pixhawk 4 Mini бути достатньо малим, щоб поміститися у 250mm гоночний дрон.
Pixhawk 4 Mini був спроєктований та розроблений у співпраці між Holybro® та Auterion®. Він заснований на стандарті дизайну Pixhawk FMUv5 та оптимізований для роботи на програмному забезпеченні управління польотом PX4.

TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Короткий опис
- Основний FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- Бортові сенсори:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055 або ICM20602
- Magnetometer: IST8310
- Barometer: MS5611
- GPS: u-blox Neo-M8N GPS/GLONASS приймач; інтегрований магнетометр IST8310
- Інтерфейси:
- 8 PWM виводів
- 4 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- 3 загальних послідовних портів
- 2 I2C порти
- 3 SPI шини
- 1 CAN шина для CAN ESC
- Аналогові входи для напруги / струму з батареї
- 2 додаткових аналогових входи
- Система живлення:
- Вхід Power Brick: 4.75~5.5V
- Вхід USB Power: 4.75~5.25V
- Вхід Servo Rail: 0~24V
- Максимальне вимірювання струму: 120A
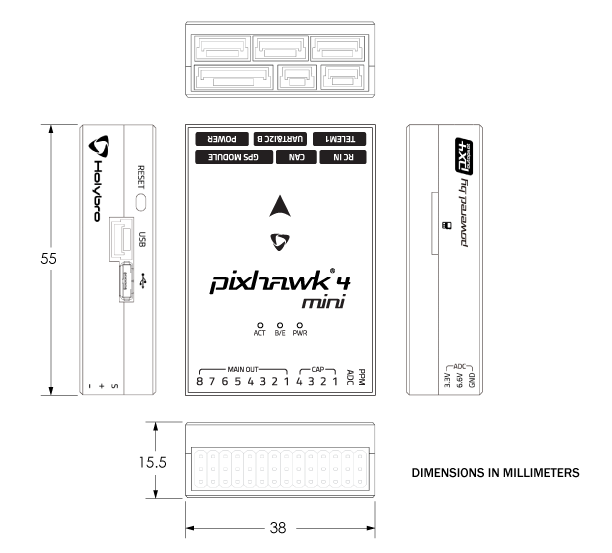
- Вага та розміри:
- Вага: 37.2g
- Розміри: 38x55x15.5mm
- Інші характеристики:
- Робоча температура: -40 ~ 85°c
Додаткову інформацію можна знайти у Технічному описі Pixhawk 4 Mini.
Де придбати
Замовляйте на Holybro.
Інтерфейси
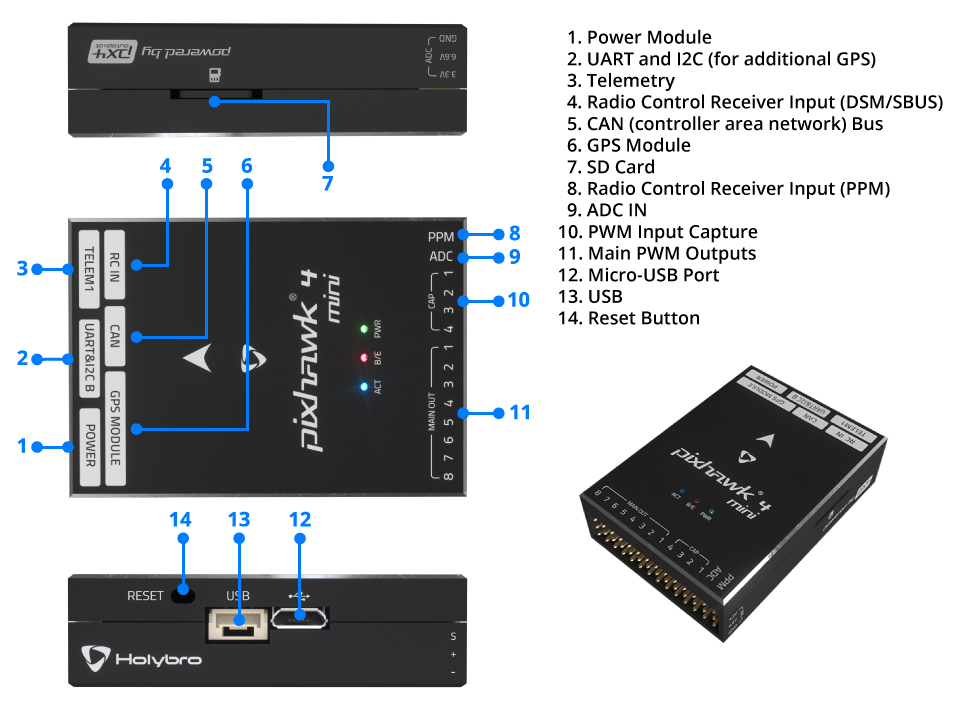
WARNING
Порти RC IN та PPM призначені лише для RC приймачів. Вони працюють на електроживленні! НІКОЛИ не підключайте до них жодних сервоприводів, джерел живлення або батарей (або до будь-якого підключеного приймача).
Розводка
Завантажте схему розводки Pixhawk 4 Mini звідси.
Розміри
Номінальна напруга
Pixhawk 4 Mini може мати резервне живлення — якщо надаються два джерела живлення. Шини живлення: POWER та USB.
Вихідна потужність MAIN OUT не живить плату політного контролера (і не живиться нею). Ви повинні подати живлення або на POWER або на USB, інакше плата буде знеживлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER (4.75V до 5.5V)
- USB вхід (4.75V до 5.25V)
Абсолютна максимальна напруга
За таких умов система залишиться неушкодженою.
- POWER вхід (0V до 6V без пошкоджень)
- USB вхід (0V до 6V без пошкоджень)
- Вхід серводвигуна: контакт VDD_SERVO MAIN OUT (0V до 24V без пошкоджень)
Збірка / налаштування
Pixhawk 4 Mini Швидкий старт з підключення надає інструкції щодо збирання необхідних/важливих периферійних пристроїв, таких як GPS, плата управління живленням тощо.
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v5_defaultВідладочний порт
Системна консоль PX4 та SWD interface працюють на порту FMU Debug. Для доступу до цих портів користувач має зняти корпус Pixhawk 4 Mini.
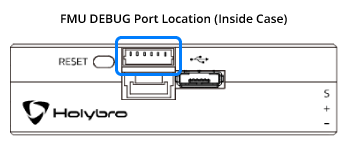
Порт має стандартну послідовну схему розводки й може бути підключений до стандартного кабелю FTDI (3.3V, до 5V) або до Dronecode probe. Розводка використовує стандартну розводку Pixhawk debug connector. Будь ласка, зверніться до сторінки підключення щодо деталей того, як під'єднатися до цього порту.
Зіставлення послідовних портів
| UART | Device | Опис параметра QGC | Мітка порту на FC |
|---|---|---|---|
| UART1 | /dev/ttyS0 | GPS1 | GPS Module |
| USART2 | /dev/ttyS1 | TELEM1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 | N/A |
| UART4 | /dev/ttyS3 | TELEM/SERIAL4 | UART/l2C B |
| USART6 | /dev/ttyS4 | N/A | RC IN |
| UART7 | /dev/ttyS5 | N/A | Debug |
| UART8 | /dev/ttyS6 | N/A | Not connected (no PX4IO) |
Периферія
Підтримувані платформи
Мотори та сервоприводи підключені до портів MAIN OUT в порядку, вказаному для вашого апарату в Довіднику планерів. Цей довідник містить зіставлення портів виводу до моторів/сервоприводів для всіх підтримуваних повітряних та наземних шасі (якщо ваше шасі не вказане в довіднику, то використовуйте "загальний" планер відповідного типу).
WARNING
Pixhawk 4 Mini не має AUX портів. Плата не може використовуватися з шасі, яким необхідно більше ніж 8 портів або які використовують AUX порти для моторів або керування. Вона може бути використана для планерів, які використовують AUX для другорядних периферійних пристроїв (наприклад, "feed-through of RC AUX1 channel").