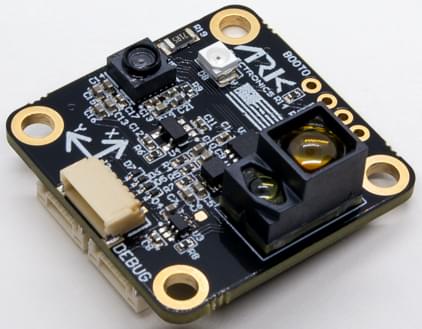
ARK Flow
ARK Flow - це відкритий код DroneCAN optical flow, сенсор відстані та IMU модуль.
Де купити
Замовте цей модуль з:
- ARK Electronics (US)
Характеристики обладнання
- Схема з відкритим кодом та BOM
- Сенсори
- PixArt PAW3902 датчик оптичного потоку
- Відстеження в умовах надзвичайно слабкого світла > 9 лк
- Широкий робочий діапазон від 80 мм до 30 м
- До 7.4 рад/с
- 40mW ІЧ-світлодіод, вбудований на плату для покращення роботи в умовах слабкого освітлення
- Broadcom AFBR-S50LV85D Time-of-Flight Distance Sensor
- Інтегроване джерело світла лазера 850 нм
- Поле зору (FoV) 12,4° x 6,2° з 32 пікселями
- Типовий діапазон відстані до 30м
- Робота в умовах 200 тис. люксів світла навколишнього середовища
- Добре працює на всіх поверхнях
- Трансмітер пучка 2° x 2° для підсвічування між 1 та 3 пікселями
- Bosch BMI088 6-Axis IMU або Invensense ICM-42688-P 6-Axis IMU
- PixArt PAW3902 датчик оптичного потоку
- STM32F412CEU6 MCU
- Два роз'єми стандарту CAN для Pixhawk (4 Pin JST GH)
- Роз'єм для відлагодження стандарту Pixhawk (6 контактів JST SH)
- Вбудований резистор CAN з можливістю програмованого переключання
- Малий форм-фактор
- 3см x 3см x 1.4см
- LED індикатори
- USA Built
Налаштування обладнання
Підключення
ARK Flow підключений до шини CAN за допомогою стандартного кабелю JST GH з чотирма контактами Pixhawk. Для отримання додаткової інформації, зверніться до інструкцій з проводки CAN.
Встановлення
Рекомендоване положення монтажу полягає в тому, щоб роз'єми на платі вказували у напрямку задньої частини дрону, як показано на наступній картинці.
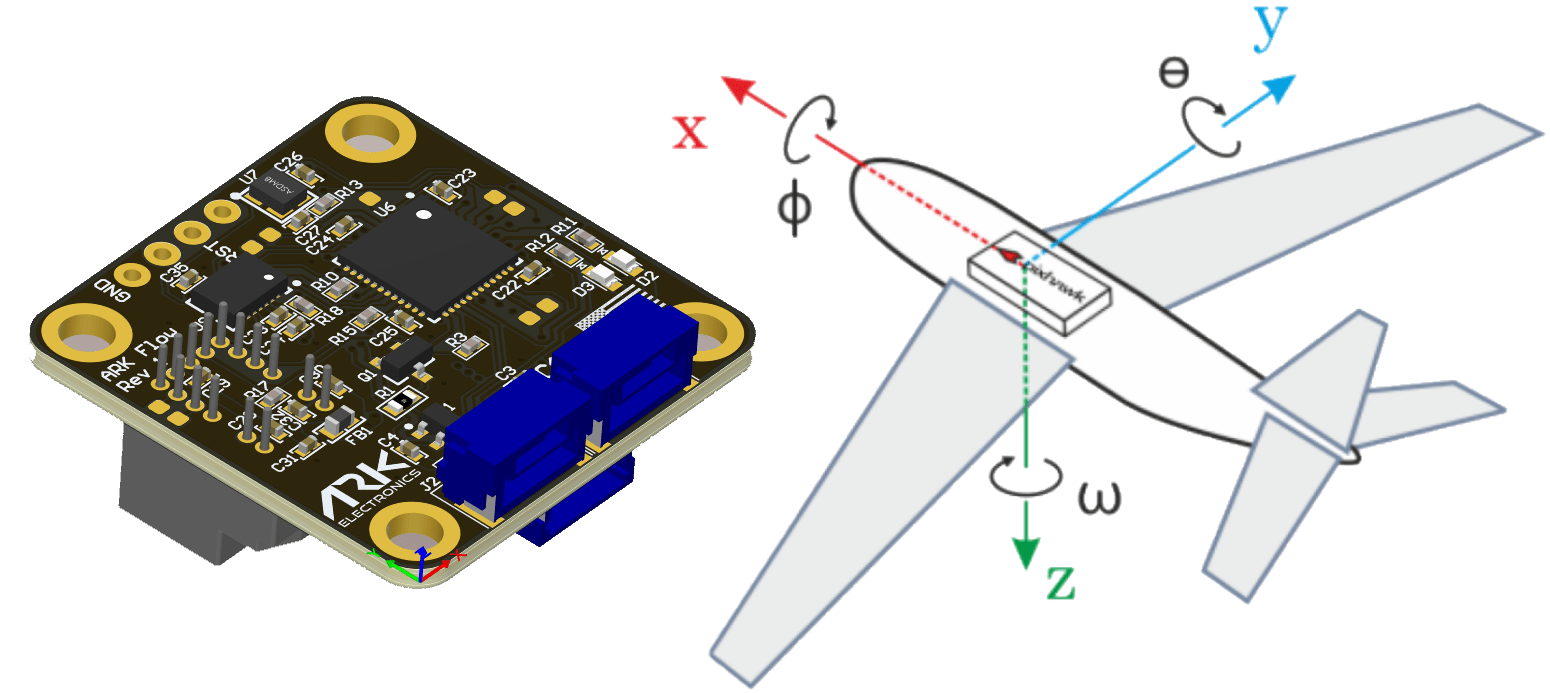
Це відповідає значенню за замовчуванням (0) параметра SENS_FLOW_ROT. Змініть параметр належним чином, якщо використовується інша орієнтація.
Датчик може бути встановлений де завгодно на рамці, але ви повинні вказати позицію фокусної точки відносно центру мас транспортного засобу під час налаштування PX4.
Налаштування прошивки
ARK Flow працює з PX4 DroneCAN Firmware. Таким чином, він підтримує оновлення прошивки через шину CAN та dynamic node allocation.
Плати ARK Flow поставляються з останнім вбудованим програмним забезпеченням, але якщо ви хочете побудувати й прошити останнє програмне забезпечення самостійно, див. PX4 DroneCAN Firmware > Building the Firmware.
- Ціль прошивки:
ark_can-flow_default - Ціль завантажувача:
ark_can-flow_canbootloader
Налаштування польотного контролера
::: інформація Ark Flow не завантажиться, якщо SD-карти немає у контролері польоту під час ввімкнення. :::
Увімкнення DroneCAN
Для використання плати ARK Flow підключіть її до шини CAN Pixhawk та увімкніть драйвер UAVCAN, встановивши параметр UAVCAN_ENABLE на 2 для динамічного призначення вузла (або 3, якщо використовуєте DroneCAN ESCs).
Кроки наступні:
- У QGroundControl встановіть параметр UAVCAN_ENABLE на
2або3та перезавантажте (див. Finding/Updating Parameters). - Підключіть ARK Flow CAN до шини CAN Pixhawk.
Після активації модуль буде виявлено при завантаженні. Дані потоку повинні надходити з частотою 10 Гц.
Конфігурацію DroneCAN в PX4 пояснено більш детально в DroneCAN > Enabling DroneCAN.
Конфігурація PX4
Потрібно встановити параметри оптичного потоку EKF для активації вимірювань оптичного потоку для розрахунку швидкості, встановити необхідні параметри DroneCAN та визначити зміщення, якщо датчик не знаходиться в центрі літального апарата.
Встановіть наступні параметри в QGroundControl:
- Увімкніть синтез оптичного потоку, встановивши EKF2_OF_CTRL.
- Щоб опціонально вимкнути підтримку GPS, встановіть EKF2_GPS_CTRL на
0. - Увімкніть UAVCAN_SUB_FLOW.
- Увімкніть UAVCAN_SUB_RNG.
- Встановіть EKF2_RNG_A_HMAX на
10. - Встановіть EKF2_RNG_QLTY_T на
0.2. - Встановіть UAVCAN_RNG_MIN на
0.08. - Встановіть UAVCAN_RNG_MAX на
30. - Встановіть SENS_FLOW_MINHGT на
0.08. - Встановіть SENS_FLOW_MAXHGT на
25. - Встановіть SENS_FLOW_MAXR на
7.4, щоб відповідав максимальній кутовій швидкості потоку PAW3902. - Параметри EKF2_OF_POS_X, EKF2_OF_POS_Y та EKF2_OF_POS_Z можуть бути встановлені для врахування зміщення Ark Flow від центру мас транспортного засобу.
Конфігурування потоку Ark
На ARK Flow можливо вам доведеться налаштувати наступні параметри:
| Параметр | Опис |
|---|---|
| CANNODE_TERM | Вбудована завершення шини CAN. |
Значення LED індикаторів
Ви побачите як червоні, так і сині світлодіоди на ARK Flow коли він прошивається, і постійний синій світлодіод, якщо він працює належним чином.
Якщо ви бачите червоний світлодіод, це означає, що виникла помилка, і вам слід перевірити наступне:
- Переконайтеся, що у польотному контролері встановлено SD-картку.
- Переконайтеся, що Ark Flow має встановлене
ark_can-flow_canbootloaderперед тим, як прошиватиark_can-flow_default. - Видаліть бінарні файли з кореневих та ufw директорій SD-карти та спробуйте зібрати та знову прошити.
Відео
PX4 утримує позицію за допомогою датчика потоку ARK для оцінки швидкості (у Режим позиції).