Надсилання та отримання дебажних значень
Часто під час розробки програмного забезпечення необхідно виводити окремі важливі числа. Ось де відбувається використання загальних пакетів NAMED_VALUE_FLOAT, DEBUG та DEBUG_VECT у MAVLink.
Відображення між Повідомленнями відлагодження MAVLink та Темами uORB
Повідомлення для налагодження MAVLink перекладаються в/з тем uORB. Для того щоб надіслати або отримати відлагоджувальне повідомлення MAVLink, вам потрібно відповідно опублікувати або підписатися на відповідну тему. Ось таблиці, яка узагальнює відповідність між повідомленнями відладки MAVLink та темами uORB:
| Повідомлення MAVLink | Тема uORB |
|---|---|
| NAMED_VALUE_FLOAT | debug_key_value |
| DEBUG | debug_value |
| DEBUG_VECT | debug_vect |
Посібник: Надсилання Стрічок / Плаваючих пар
Цей посібник показує, як надіслати повідомлення MAVLink NAMED_VALUE_FLOAT, використовуючи пов'язану тему uORB debug_key_value.
Код для цього посібника доступний тут:
- Код відлагоджування
- Увімкніть додаток-посібник, переконавшись, що додаток для відлагодження MAVLink (CONFIG_EXAMPLES_PX4_MAVLINK_DEBUG) знаходиться в конфігурації вашої плати та встановлений на 'y'.
Все необхідне для налаштування відлагодження публікації - це цей фрагмент коду. Спочатку додайте файл заголовка:
C
#include <uORB/uORB.h>
#include <uORB/topics/debug_key_value.h>
#include <string.h>Потім рекламуйте тему значення налагодження (одна реклама для різних опублікованих назв достатня). Поставте це перед вашим головним циклом:
C
/* advertise debug value */
struct debug_key_value_s dbg;
strncpy(dbg.key, "velx", sizeof(dbg.key));
dbg.value = 0.0f;
orb_advert_t pub_dbg = orb_advertise(ORB_ID(debug_key_value), &dbg);І навіть надсилання у головному циклі є ще простішим:
C
dbg.value = position[0];
orb_publish(ORB_ID(debug_key_value), pub_dbg, &dbg);WARNING
Декілька відлагоджувальних повідомлень повинні мати достатньо часу між їх відповідними публікаціями, щоб Mavlink міг їх обробити. Це означає, що код повинен чекати між публікацією кількох відлагоджувальних повідомлень або чергувати повідомлення при кожному виклику функції.
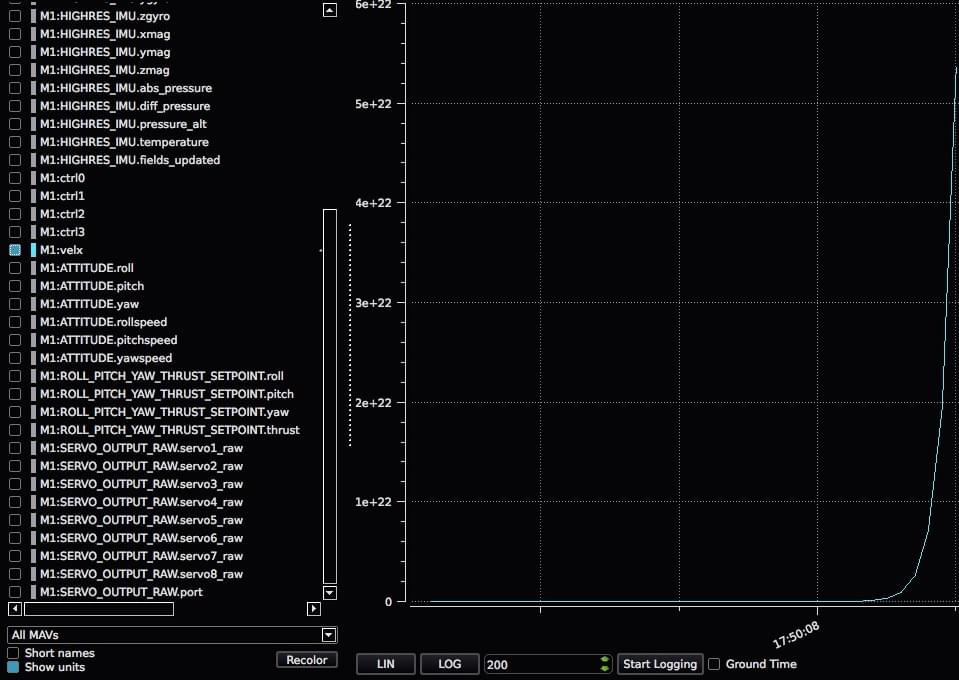
Результат у QGroundControl виглядає так на графіку в реальному часі:
Посібник: Отримання Стрічок / Плаваючих пар
Наведені нижче уривки коду показують, як отримати змінну відлагодження velx, яка була відправлена в попередньому посібнику.
Спочатку підпишіться на тему debug_key_value:
C
#include <poll.h>
#include <uORB/topics/debug_key_value.h>
int debug_sub_fd = orb_subscribe(ORB_ID(debug_key_value));
[...]Потім проведіть опитування на тему:
C
[...]
/* one could wait for multiple topics with this technique, just using one here */
px4_pollfd_struct_t fds[] = {
{ .fd = debug_sub_fd, .events = POLLIN },
};
while (true) {
/* wait for debug_key_value for 1000 ms (1 second) */
int poll_ret = px4_poll(fds, 1, 1000);
[...]Коли нове повідомлення доступне на темі debug_key_value, не забудьте фільтрувати його за атрибутом ключа, щоб відкинути повідомлення з ключем, відмінним від velx:
C
[...]
if (fds[0].revents & POLLIN) {
/* obtained data for the first file descriptor */
struct debug_key_value_s dbg;
/* copy data into local buffer */
orb_copy(ORB_ID(debug_key_value), debug_sub_fd, &dbg);
/* filter message based on its key attribute */
if (strcmp(_sub_debug_vect.get().key, "velx") == 0) {
PX4_INFO("velx:\t%8.4f", dbg.value);
}
}
}