Датчики відстані (далекодобива)
Датчики відстані надають вимірювання відстані, які можуть бути використані для слідування за місцевістю, утримання на місці (тобто точне зависання для фотографії), покращення поведінки при посадці (умовна допомога в діапазоні), попередження про регуляторні висотні обмеження, запобігання зіткненням тощо.
Цей розділ містить перелік датчиків відстані, підтримуваних PX4 (посилання на більш докладну документацію), загальну конфігурацію, необхідну для всіх дальномерів, тестування та інформацію про класичну симуляцію Gazebo. Додаткову інформацію щодо налаштування та конфігурації надається в темах, посилених нижче (та в бічній панелі).



Підтримувані дальномери
ARK Flow
ARK Потік - це модуль сенсора відкритого коду Time-of-Flight (ToF) та оптичного потоку, який здатний вимірювати відстані від 8 см до 30 м. Він може бути підключений до контролера польоту через свій порт CAN1, що дозволяє підключати додаткові датчики через свій порт CAN2. Підтримує DroneCAN, працює з Прошивкою PX4 DroneCAN та упакований у крихітний форм-фактор.
Лідар Holybro ST VL53L1X
VL53L1X - це передовий лазерно-вимірювальний сенсор часу польоту (ToF), який покращує продуктову лінійку ST FlightSense™. Це найшвидший мініатюрний датчик ToF на ринку з точним вимірюванням до 4 м і швидкою частотою вимірювання до 50 Гц.
Він поставляється з роз'ємом JST GHR 4 pin, який сумісний з портом I2C на Pixhawk 4, Pixhawk 5X та іншими контролерами польоту, які відповідають Стандарту роз'ємів Pixhawk).
Lidar-Lite
Lidar-Lite - це компактний, високопродуктивний оптичний дальніметр для вимірювання відстані. Він має діапазон сенсора від (5см - 40м) і може бути підключений до портів PWM або I2C.
MaxBotix I2CXL-MaxSonar-EZ
Дальність MaxBotix I2CXL-MaxSonar-EZ має кілька досить короткодіючих датчиків відстані на основі сонару, які підходять для допомоги при зльоті/посадці та уникнення зіткнень. Ці можуть бути підключені за допомогою порту I2C.
Дальномери активовані за допомогою параметра SENS_EN_MB12XX.
Лідари Lightware
Лідар Lightware SFxx надає широкий спектр легких "лазерних альтиметрів", які підходять для багатьох додатків дронів.
PX4 підтримує: SF11/c та SF/LW20. PX4 також може бути використаний з наступними припиненими моделями: SF02, SF10/a, SF10/b, SF10/c.
PX4 також підтримує LightWare LiDAR SF45 Обертовий Лідар для застосувань у запобіганні зіткнень.
Дальніміри TeraRanger
TeraRanger надає ряд легких сенсорів вимірювання відстані на основі інфрачервоної технології часу польоту (ToF). Вони зазвичай швидші і мають більший діапазон, ніж ехолокатори, і менші та легші, ніж системи на основі лазера.
PX4 підтримує наступні моделі, підключені через шину I2C: TeraRanger One, TeraRanger Evo 60m та TeraRanger Evo 600Hz.
Стандартний радарний висотомір Ainstein US-D1
Стандартний радіолокатор висоти US-D1 від Ainstein - це компактний мікрохвильовий дальномер, який був оптимізований для використання на БПЛА. Він має діапазон виявлення близько 50м. Особливі переваги цього продукту полягають в тому, що він може ефективно працювати в усіх погодних умовах і на всіх типах місцевості (включаючи воду).
LeddarOne
LeddarOne - це невеликий модуль Lidar з вузьким, але розсіяним променем, який пропонує відмінний загальний діапазон виявлення та продуктивність в міцному, надійному та економічному пакеті. Він має діапазон відчуття від 1 см до 40 м і потребує підключення до шини UART/серійного порту.
TFmini
Лідар Benewake TFmini - це крихітний, недорогий та енергоефективний лідар з дальністю 12 м.
PSK-CM8JL65-CC5
Датчик відстані ІЧ вимірювання Lanbao PSK-CM8JL65-CC5 ToF є дуже малий (38 мм х 18 мм х 7 мм, <10 г) датчик відстані з діапазоном від 0,17 м до 8 м і роздільною здатністю у міліметрах. Він повинен бути підключений до шини UART/серійного порту.
Авіоніка Анонімний UAVCAN Лазерний Альтиметр Інтерфейс
Інтерфейс лазерного альтиметра Avionics Anonymous UAVCAN дозволяє підключати кілька поширених дальномерів (наприклад, Lightware SF11/c, SF30/D тощо) до шини CAN через DroneCAN, інтерфейс, що є надійнішим, ніж I2C.
Конфігурація/Налаштування
Дальні вимірювачі зазвичай підключаються до порту або послідовного (PWM), або I2C (залежно від драйвера пристрою), і активуються на порту шляхом встановлення певного параметра.
Апаратне та програмне забезпечення, яке специфічне для кожного датчика відстані, описано в їхніх окремих темах.
Загальна конфігурація, яка є спільною для всіх відстанційних датчиків, охоплюючи як фізичне налаштування, так і використання, наведена нижче.
Загальна конфігурація
Загальна конфігурація дальномера вказується за допомогою параметрів EKF2_RNG_*. Ці включають (не вичерпно):
- EKF2_RNG_POS_X, EKF2_RNG_POS_Y, EKF2_RNG_POS_Z - зміщення дальномера від центру ваги транспортного засобу в напрямках X, Y, Z.
- EKF2_RNG_PITCH - Значення 0 градусів (типове) відповідає тому, що дальномер точно вирівняний з вертикальною віссю літального апарата (тобто прямо вниз), тоді як 90 градусів показує, що дальномер спрямований вперед. Проста тригонометрія використовується для обчислення відстані до землі, якщо використовується ненульовий кут нахилу.
- EKF2_RNG_DELAY - приблизна затримка даних, що надходять до оцінювача від датчика.
- EKF2_RNG_SFE - Масштабування шуму, залежного від дальномера.
- EKF2_RNG_NOISE - Шум вимірювання для об'єднання дальномера
Тестування
Найлегший спосіб перевірити дальномер - змінювати діапазон і порівнювати зі значеннями, виявленими PX4. Нижче наведено деякі підходи до отримання виміряного діапазону.
Інспектор MAVLink QGroundControl
Інспектор MAVLink QGroundControl дозволяє переглядати повідомлення, відправлені з апарату, включаючи інформацію DISTANCE_SENSOR від дальномера. Основна відмінність між інструментами полягає в тому, що інструмент Аналізувати може побудувати значення на графіку.
:::note Повідомлення, які надсилаються, залежать від конфігурації транспортного засобу. Ви отримаєте повідомлення лише, якщо підключений транспортний засіб має встановлений дальніомір і публікує значення сенсора DISTANCE_SENSOR. :::
Для перегляду виводу дальномера:
Відкрийте меню Q > Вибір Інструменту > Інструменти Аналізу:
Виберіть повідомлення
DISTANCE_SENSOR, а потім встановіть прапорець графіку протиcurrent_distance. Інструмент потім побудує результат: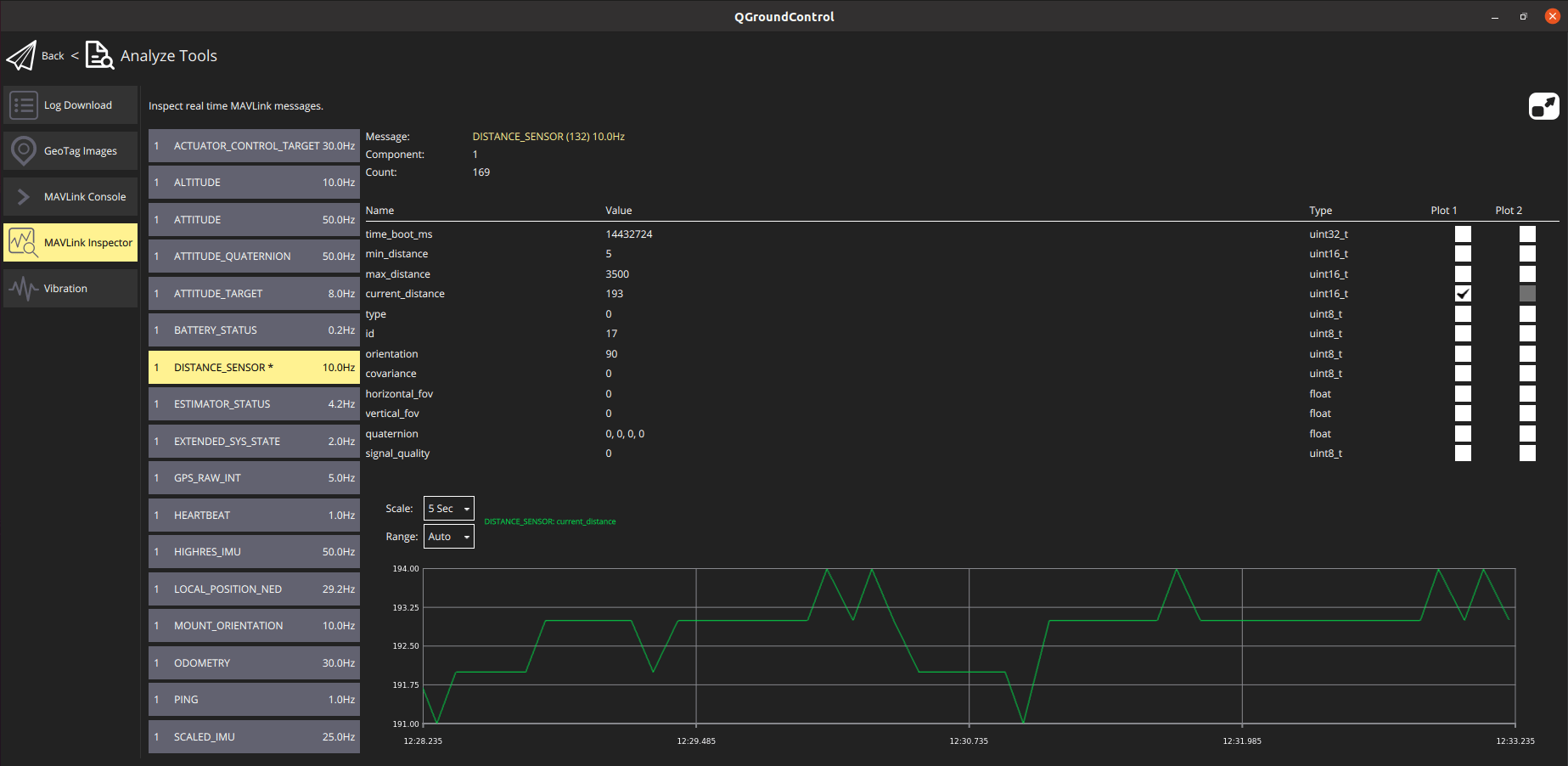
Консоль QGroundControl MAVLink
Ви також можете використовувати QGroundControl MAVLink Console, щоб спостерігати за темою uORB distance_sensor:
sh
listener distance_sensor 5:::note Консоль QGroundControl MAVLink працює при підключенні до Pixhawk або інших цілей NuttX, але не до Симулятора. На симуляторі ви можете виконувати команди безпосередньо в терміналі. :::
Для отримання додаткової інформації див.: Розробка > Налагодження/Журналювання> Налагодження датчика/Теми за допомогою команди слухача.
Класичний симулятор Gazebo
Лідар та сонарні дальномери можуть бути використані в симуляторі Gazebo Classic. Для цього вам потрібно запустити симулятор, використовуючи модель автомобіля, яка включає дальномір.
Модель оптичного потоку ірису включає лідарний дальномер:
sh
make px4_sitl gazebo-classic_iris_opt_flowТайфун_h480 включає в себе зондовий дальномер:
sh
make px4_sitl gazebo-classic_typhoon_h480Якщо вам потрібно використовувати інше транспортний засіб, ви можете включити модель у файл конфігурації. Ви можете побачити, як у відповідних файлах конфігурації Iris та Typhoon:
- xml
<include> <uri>model://lidar</uri> <pose>-0.12 0 0 0 3.1415 0</pose> </include> <joint name="lidar_joint" type="revolute"> <child>lidar::link</child> <parent>iris::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint> - xml
<include> <uri>model://sonar</uri> </include> <joint name="sonar_joint" type="revolute"> <child>sonar_model::link</child> <parent>typhoon_h480::base_link</parent> <axis> <xyz>0 0 1</xyz> <limit> <upper>0</upper> <lower>0</lower> </limit> </axis> </joint>