Апаратне забезпечення MindPX
PX4 не виробляє цей (чи будь-який інший) автопілот. Зверніться до виробника щодо підтримки обладнання або питань сумісності.
Серія AirMind® MindPX - це нове покоління автопілотів, що відгалужується від Pixhawk®.

Ці контролери польоту підтримуються виробником.
Короткий опис
Основна документація щодо апаратного забезпечення знаходиться тут.
MindPX - це нова система автопілотів, що створена з Pixhawk®, переглянута в схематиці та структурі, і вони були ще більше розширені новими можливостями, щоб безпілотний пристрій був "розумнішим" та простшим у користуванні.
MindPX збільшує загальну кількість каналів виведення PWM до 16 (8 основних виводів + 8 допоміжних виводів). Це означає, що MindPX може підтримувати більш складні конфігурації VTOL і кращий контроль. Це особливо важливо для тих контролерів польоту на основі FMU-V4, оскільки MindPX реалізує основний та додатковий вивід в одному FMU.
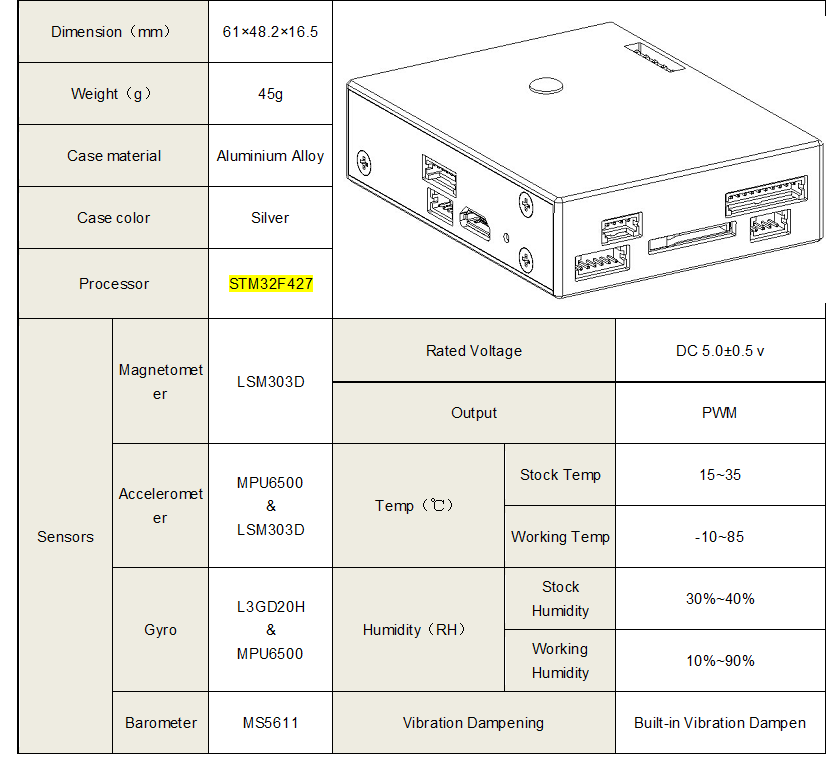
Головний системний чіп: STM32F427
- Процесор: 32bits, 168 MHz ARM Cortex® M4 з FPU
- RAM: 256 KB SRAM
- 2MB Flash
- ST Micro LSM303D 14 бітний акселерометр/магнітометр
- MEAS MS5611 барометр
- Інтегровані датчики 6-осевого сенсора InvenSense® MPU6500
Виділені функції:
- Корпус із обробленого CNC алюмінієвого сплаву, легкий і міцний
- Вбудована ізольована резервна IMU
- Загалом 16 каналів виведення PWM (8 основних + 8 додаткових)
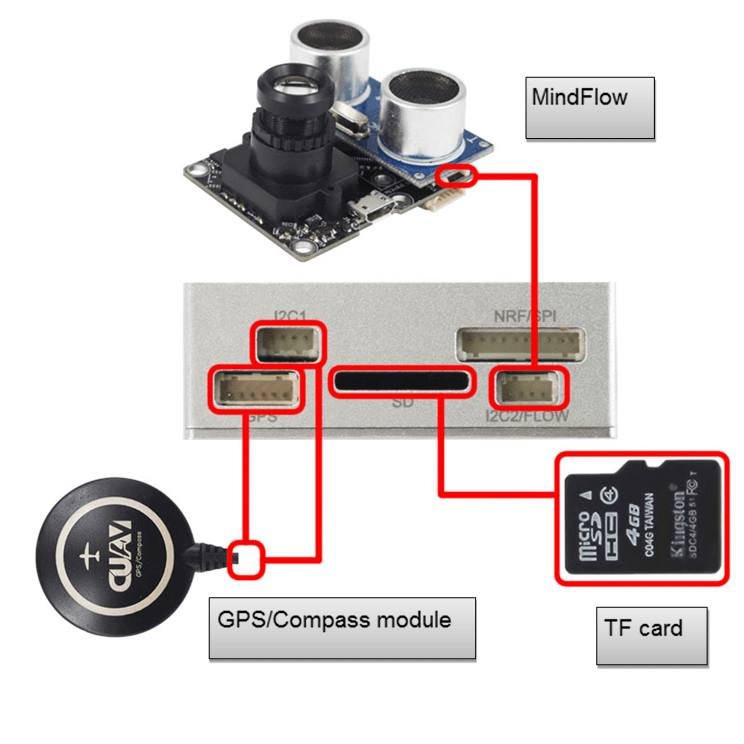
- 1 додатковий порт I2C для підключення потоку.
- 1 додатковий USB-порт для підключення компаньйон-комп'ютера (вбудований конвертер UART-to-USB)
- Відкритий порт для налагодження
Швидкий Старт
Встановлення
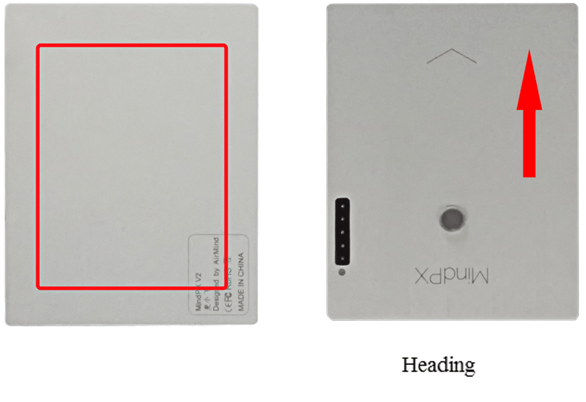
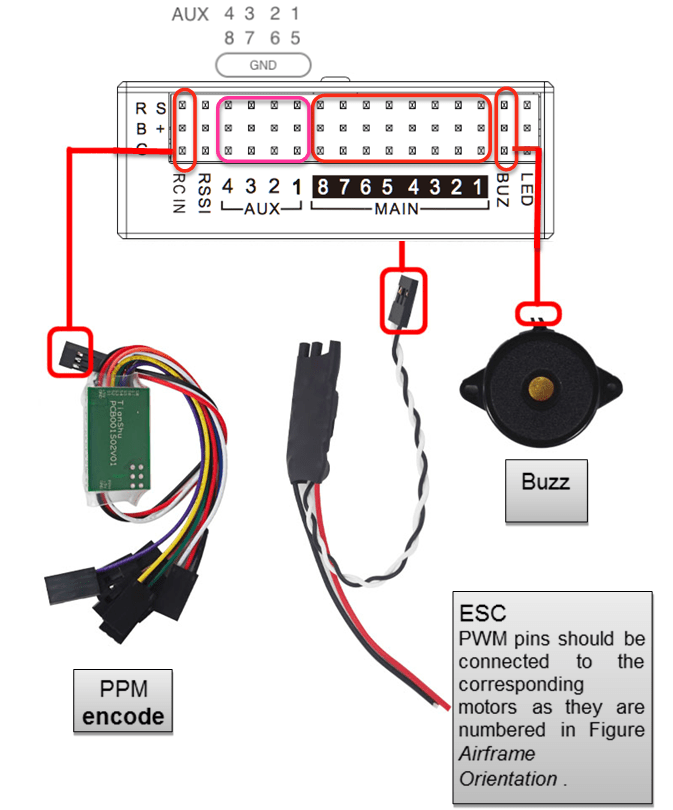
Схема підключення
Піни
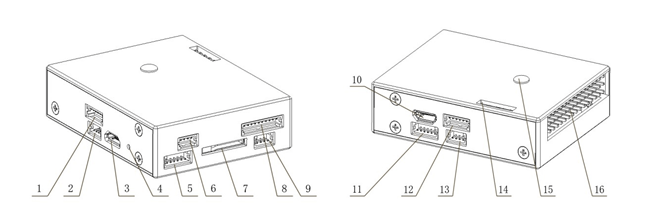
| Номер. | Опис | Номер | Опис |
|---|---|---|---|
| 1 | Живлення | 9 | I2C2 (MindFLow) |
| 2 | Відлагодження (оновлення завантажувача) | 10 | USB2 (Serial 2 to USB) |
| 3 | USB1 (оновлення прошивки) | 11 | UART4,5 |
| 4 | Reset | 12 | UART1 (Телеметрія) |
| 5 | UART3 (GPS) | 13 | CAN |
| 6 | I2C1(Зовнішній компас) | 14 | ADC |
| 7 | Слот для TF-карти | 15 | Триколорне світло |
| 8 | NRF/SPI(Дистанційне Управління) | 16 | Looper |
Приймач радіо
MindPX підтримує широкий спектр радіоприймачів (починаючи з версії V2.6), включаючи: PPM/SBUS/DSM/DSM2/DSMX. MindPX також підтримує бі-дирекційну телеметрію FrSky® D та S.Port.
Для детальної схеми Pin, будь ласка, зверніться до Керівництва користувача.
Створення прошивки
TIP
Більшості користувачів не потрібно створювати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цього контролера:
make airmind_mindpx-v2_defaultПідключення ПК компаньйона
MindPX має USB-TO-UART Bridge IC на платі. Кабель micro-USB до USB type A використовується для підключення. Підключіть micro-USB кінець до порту 'OBC' MindPX та USB type A кінець до комп'ютера-компаньйона.
Максимальна швидкість BAUD така ж, як у родини px4, яка становить до 921600.
Посібник користувача
Посібник користувача доступний тут.
Де придбати
MindRacer доступний на AirMind Store в Інтернеті. Ви також можете знайти MindRacer на Amazon® або на eBay®.
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | RC |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | ? |
| UART7 | /dev/ttyS5 | Консоль відлагодження |
| UART8 | /dev/ttyS6 | ? |
Підтримка
Будь ласка, зайдіть на http://www.mindpx.org для отримання додаткової інформації. Або ви можете надіслати email на support@mindpx.net для будь-яких запитів або допомоги.