Швидке підключення Holybro Pixhawk 5x
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Цей швидкий старт показує, як живити польовий контролер Pixhawk® 5X та підключити його найважливіші периферійні пристрої.

Набір Pixhawk 5 стандартний
Огляд схеми підключення
На зображенні нижче показано, як підключити найважливіші датчики та периферійні пристрої.
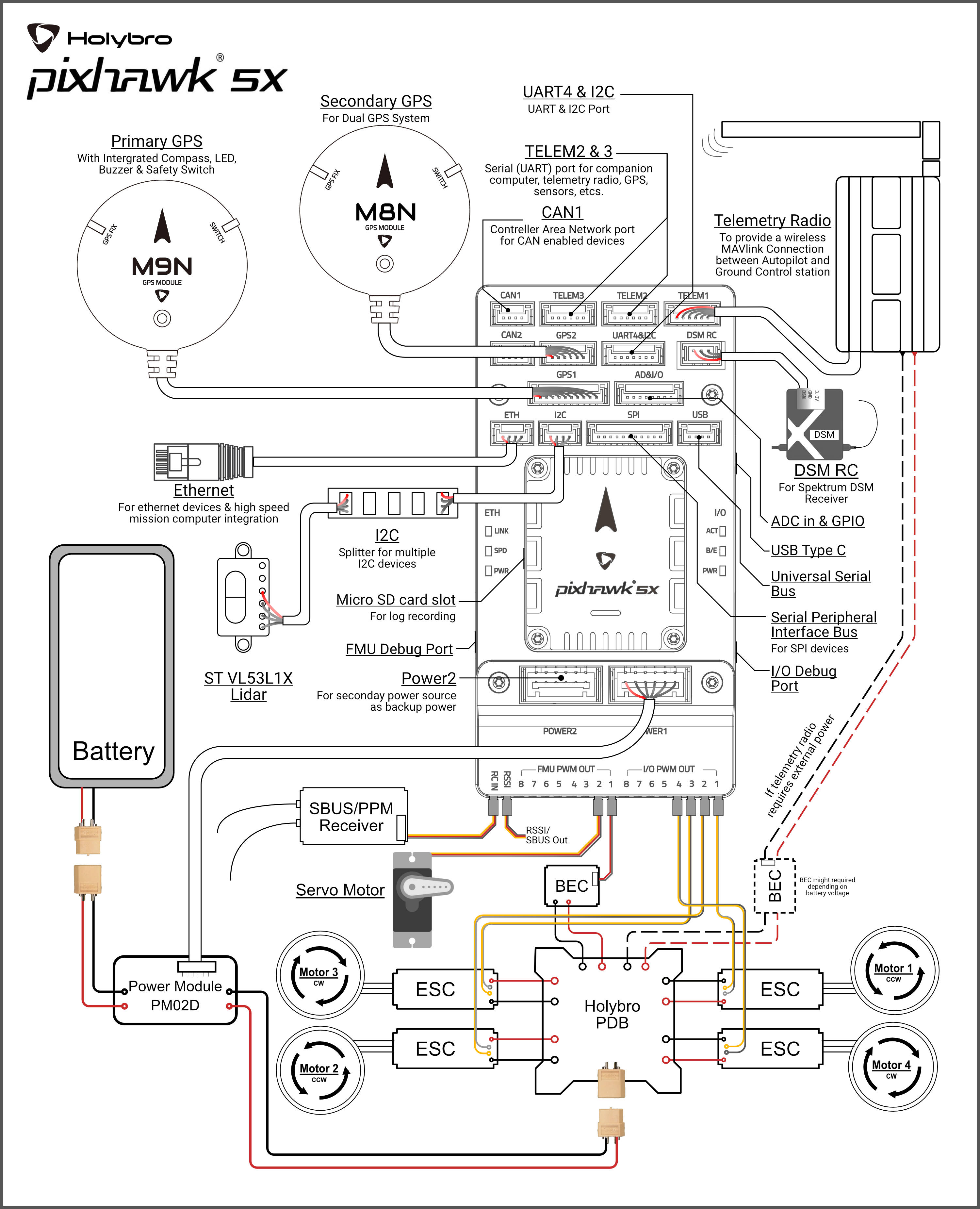
TIP
Додаткову інформацію про доступні порти можна знайти тут: Pixhawk 5X > Connections.
Монтаж та орієнтація контролера
Pixhawk 5X можна змонтувати на раму за допомогою двосторонньої стрічки, включеної в комплект. Він повинен бути розташований якомога ближче до центру ваги вашого транспортного засобу, орієнтований верхньою стороною вгору зі стрілкою, що вказує вперед транспортного засобу.

Якщо контролер не може бути змонтований у рекомендованому/стандартному положенні (наприклад, через обмеження місця), вам потрібно буде налаштувати програмне забезпечення автопілота з орієнтацією, яку ви фактично використовували: Орієнтація контролера польоту.
GPS + компас + зумер + захисний вимикач + світлодіод
Набір Pixhawk5X Standard Set можна придбати з GPS M8N або M9N (10-контактний роз'єм), який слід підключити до порту GPS1. Ці модулі GNSS мають вбудований компас, безпечний перемикач, дзвіночок та світлодіод.
Додатковий GPS M8N або M9N (6-контактний роз'єм) можна придбати окремо і підключити до порту GPS2.
GPS/Компас слід монтувати на раму якомога подалі від інших електронних пристроїв, з напрямком вперед транспортного засобу (відокремлення компаса від інших електронних пристроїв зменшить втручання).

Вбудований безпечний вимикач в GPS-модулі увімкнений за замовчуванням (коли включений, PX4 не дозволить вам готувати до польоту). Щоб вимкнути безпеку, натисніть і утримуйте безпечний вимикач протягом 1 секунди. Ви можете натиснути безпечний вимикач знову, щоб увімкнути безпеку та відключити транспортний засіб (це може бути корисно, якщо, з якихось причин, ви не можете вимкнути транспортний засіб за допомогою вашого пульта дистанційного керування або наземної станції).
Power
Підключіть вихід модуля живлення PM02D Power Module (PM-плата), який поставляється зі стандартним набором, до одного з роз'ємів POWER Pixhawk 5X за допомогою 6-жильного кабелю. Порти PM02D та Power на Pixhawk 5X використовують 6 circuit 2.00mm Pitch CLIK-Mate Wire-to-Board PCB Receptacle & Housing.
Модуль живлення PM02D підтримує акумулятор 2~6S, вхід до плати повинен бути підключений до вашого LiPo акумулятора. Зверніть увагу, що плата PM не постачає живлення на контакти + та - FMU PWM OUT та I/O PWM OUT.
Якщо використовується літак або рухомий об'єкт, вихідна рейка FMU PWM-OUT повинна бути окремо живлена для керування сервоприводами для рульових пристроїв, елеронами тощо. Це можна зробити, під'єднавши 8-контактний живильний (+) рейл FMU PWM-OUT до стабілізатора напруги (наприклад, ESC з обладнаною BEC або автономною BEC на 5 В або акумулятором LiPo 2S).
INFO
Напруга шини живлення повинна бути відповідною для використаного сервоприводу!
| PIN & Connector | Функція |
|---|---|
| I/O PWM Out | Підключіть сигнальні та земельні проводи двигуна тут. |
| FMU PWM Out | Підключіть сигнальні, позитивні та GND-проводи сервоприводу сюди. |
MAIN виходи у прошивці PX4 призначені для порту I/O PWM OUT на Pixhawk 5X, тоді як виходи AUX призначені для порту FMU PWM OUT на Pixhawk 5X. Наприклад, MAIN1 відповідає виводу IO_CH1 I/O PWM OUT, а AUX1 відповідає виводу FMU_CH1 FMU PWM OUT.
Схема роз'ємів Pixhawk 5X для підключення живлення показана нижче. Роз'єми живлення приймають цифровий сигнал I2C від модуля живлення PM02D для даних про напругу та силу струму. Лінії VCC повинні пропонувати принаймні 3A безперервного струму і за замовчуванням повинні мати напругу 5,2 В. Нижчий напруга 5V все ще прийнятний, але не рекомендується.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1(red) | VCC | +5V |
| 2(black) | VCC | +5V |
| 3(black) | SCL | +3.3V |
| 4(black) | SDA | +3.3V |
| 5(black) | GND | GND |
| 6(black) | GND | GND |
Радіоуправління
Для того щоб керувати транспортним засобом вручну, потрібна система радіоуправління (RC) (PX4 не потребує системи радіоуправління для автономних режимів польоту).
Вам потрібно вибрати сумісний передавач/приймач і зв'язати їх таким чином, щоб вони взаємодіяли (ознайомтеся з інструкціями, що додаються до вашого конкретного передавача/приймача).
- Приймачі Spektrum/DSM підключаються до входу DSM/SBUS RC.
- Приймачі PPM або SBUS підключаються до вхідного порту RC IN.
PPM та PWM приймачі, які мають окремий дріт для кожного каналу, повинні підключатися до порту RC IN через PPM перетворювач на зразок цього (PPM-Sum приймачі використовують єдиний сигнальний дріт для всіх каналів).
Для отримання додаткової інформації про вибір системи радіо, сумісність приймачів та зв'язування вашої пари передавача/приймача дивіться: Remote Control Transmitters & Receivers.
Телеметрійне радіо (Опціонально)
Телеметричні радіостанції можуть використовуватися для зв'язку та управління транспортним засобом у польоті з наземної станції (наприклад, ви можете направляти БПЛА до певної позиції або завантажувати нове завдання).
Радіостанцію, розташовану на транспортному засобі, слід підключити до порту TELEM1, як показано нижче (якщо підключено до цього порту, додаткова конфігурація не потрібна). Інша радіостанція підключається до вашого комп'ютера або мобільного пристрою наземної станції (зазвичай за допомогою USB).
Радіостанції також доступні для придбання на веб-сайті Holybro .
SD-карта (Опціонально)
Картки SD настійно рекомендується, оскільки вони потрібні для запису та аналізу даних польоту, для виконання місій та для використання апаратного засобу UAVCAN-bus. Вставте картку (включену в комплект Pixhawk 5X) в Pixhawk 5X, як показано нижче.

TIP
Для отримання додаткової інформації див. Основні концепції > SD-карти (знімна пам'ять).
Двигуни
Мотори/сервоприводи підключені до портів I/O PWM OUT (MAIN) та FMU PWM OUT (AUX) в порядку, вказаному для вашого апарату в Довіднику планерів.
INFO
Цей info містить зіставлення портів виводу до моторів/сервоприводів для всіх підтримуваних повітряних та наземних шасі (якщо ваше шасі не вказане в довіднику, то використовуйте "загальний" планер відповідного типу).
WARNING
Відображення не є однорідним для всіх конструкцій (наприклад, ви не можете покладатися на те, що ручка газу буде на тому ж вихідному порту для всіх повітряних конструкцій). Переконайтеся, що ви використовуєте правильне відображення для вашого транспортного засобу.
Інші пристрої
Підключення та конфігурація додаткових/менш поширених компонентів описано в темах для окремих периферійних пристроїв.
Схема розташування виводів
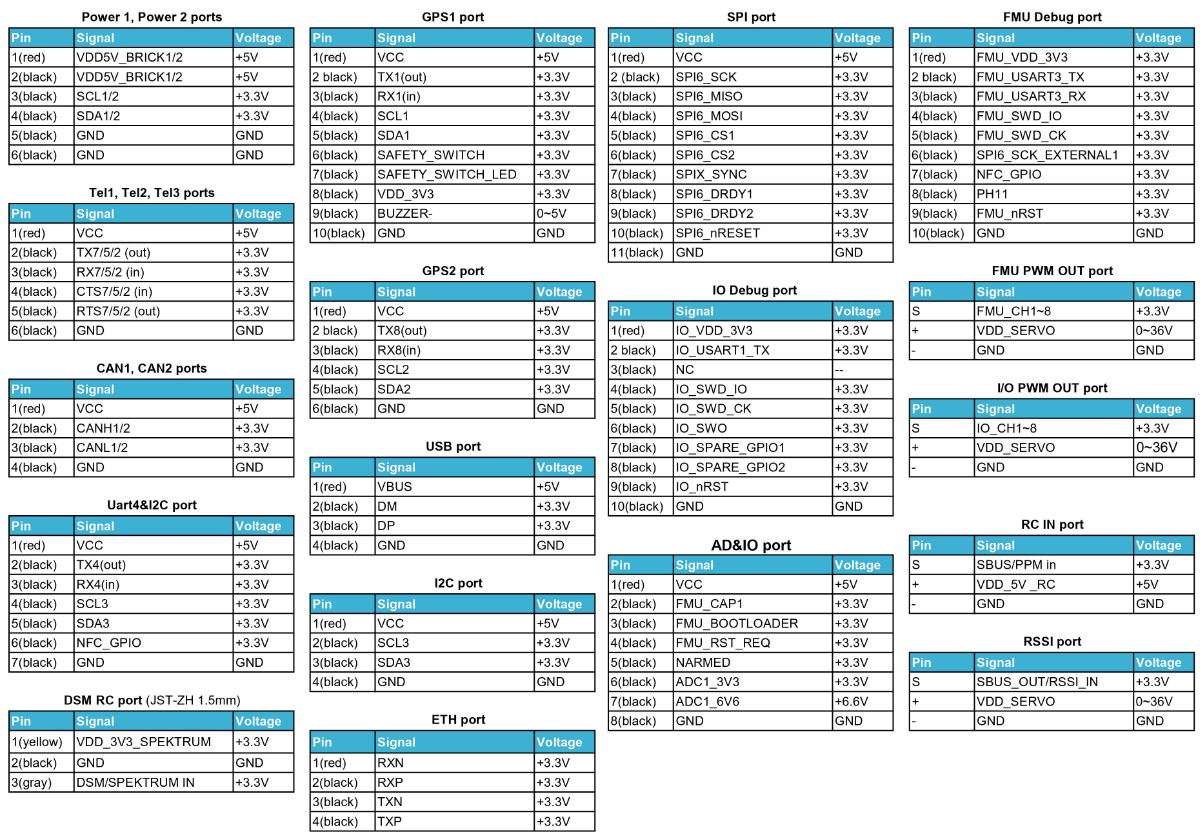
Ви також можете завантажити схему розташування виводів Pixhawk 5X тут або тут.
Конфігурація
Загальну інформацію про конфігурацію описано в: Конфігурація автопілота.
Особливу конфігурацію QuadPlane описано тут: Конфігурація QuadPlane VTOL
Детальна інформація
- Pixhawk 5X (Сторінка огляду документа PX4)
- Огляд & специфікація Pixhawk 5X (Holybro)
- Розводка Pixhawk 5X (Holybro)
- Схема роз'ємів для посилання на FMUv5X.
- Стандарт автопілота Pixhawk FMUv5X.
- Стандарт шин автопілота Pixhawk.
- Стандарт роз'ємів Pixhawk.