Диспетчер польотів CUAV Nora
PX4 не виробляє цей (або будь-який) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності.
Контролер польоту Nora® - це високопродуктивний автопілот. Це ідеальний вибір для промислових дронів і великомасштабних важких дронів. В основному постачається комерційним виробникам.
Нора - це варіант CUAV X7. Він використовує інтегровану материнську плату (м'яку і тверду), що зменшує кількість внутрішніх роз'ємів польотного контролера, підвищує надійність і розміщує всі інтерфейси збоку (роблячи проводку більш лаконічною).
Цей польотний контролер підтримується виробником.
Особливості
- Внутрішнє поглинання ударів
- Інтегрований процес зменшує відмову, спричинену пошкодженням інтерфейсу.
- Підтримка USB_HS, швидше завантаження журналів (PX4 ще не підтримується)
- Підтримка більшої кількості виходів dshot
- Підтримка нагріву IMU, покращення роботи датчика
- Виділений порт для акумулятора CAN
- 3 комплекти датчиків IMU
- Автомобільний компас RM3100
- Високопродуктивний процесор
TIP
Виробник CUAV Docs є канонічним посиланням для Nora. Вони повинні використовуватися за перевагою, оскільки вони містять найбільш повну та актуальну інформацію.
Короткий опис
Головний FMU процесор: STM32H743
Бортові сенсори:
- Акселерометр/Гіроскоп: ICM-20689
- Прискорювач/гіроскоп: ICM-20649
- Акселерометр/Гіроскоп: BMI088
- Магнітометр: RM3100
- Барометр: MS5611*2
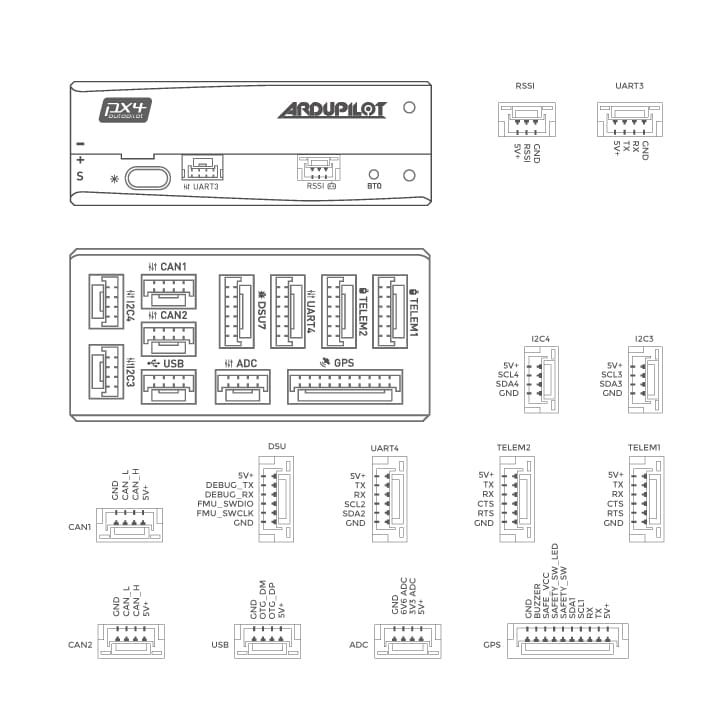
Інтерфейси:
- 14 ШІМ-виходів (12 підтримує Dshot)
- Підтримка декількох входів RC (SBU / CPPM / DSM)
- Аналоговий / PWM вхід RSSI
- 2 GPS порти (GPS і UART4 порти)
- 4 шини i2c (два виділені порти i2c)
- 2 порти CAN шини
- 2 порти живлення (Power A - загальний інтерфейс адаптера, Power C - інтерфейс акумулятора DroneCAN)
- 2 входи АЦП
- 1 USB порт
Система живлення:
- Живлення: 4.3~5.4В
- Вхід USB: 4.75~5.25В
- Вхід сервоприводу: 0~36V
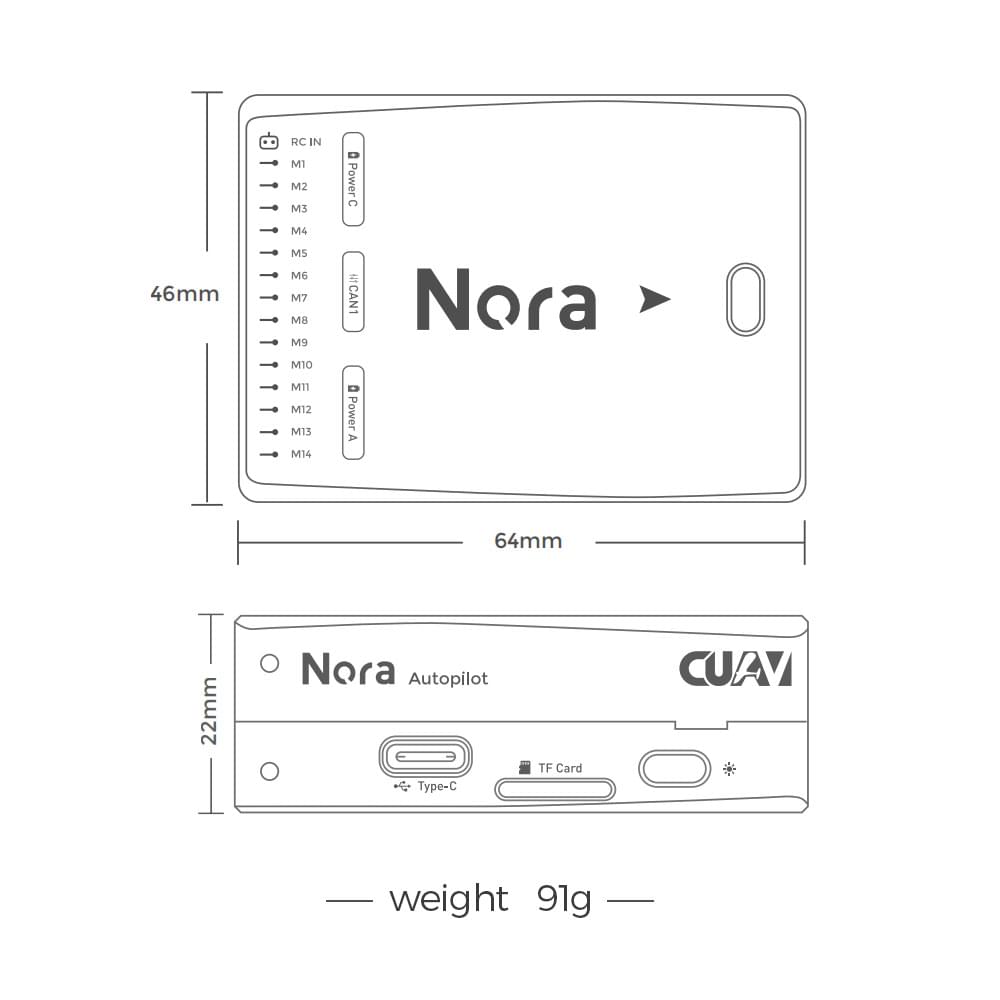
Вага та розміри:
- Вага: 101 g
Інші характеристики:
- Робоча температура: -20 ~ 80°c (виміряне значення)
- Три імуси
- Підтримка компенсації температури
- Внутрішнє поглинання ударів
INFO
Коли він працює під управлінням прошивки PX4, працюють лише 8 ШІМ-виходів. Решта 6 ШІМ-портів все ще адаптуються (тому на момент написання статті вони не сумісні з VOLT).
Де придбати
З'єднання (Проводка)
Короткий посібник з підключення CUAV nora
Розмір та роз'єми
WARNING
Порт RCIN призначено лише для живлення rc-приймача і його не можна підключати до жодного джерела живлення/навантаження.
Номінальна напруга
Nora AutoPilot* може мати потрійне резервування джерела живлення, якщо до нього підключено три джерела живлення. Дві шини живлення: POWERA, POWERC і USB.
Вихідні шини живлення PWM OUT (від 0В до 36В) не живлять плату контролера польоту (і не живляться від неї). Ви повинні подати живлення на один з виводів POWERA, POWERC або USB, інакше плата буде знеструмлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWERA та POWERC входи (від 4,3 В до 5,4 В)
- USB вхід (4.75V до 5.25V)
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make cuav_nora_defaultЗахист від перенапруги
Nora має захист від перенапруги на периферійних пристроях з напругою 5 Вольт і 5 Вольт високої потужності, який обмежує струм до 2,5 А. Nora має захист від короткого замикання.
WARNING
На роз'єми, позначені як контакт 1, можна подавати до 2,5 А (хоча вони розраховані лише на 1 А).
Відладочний порт
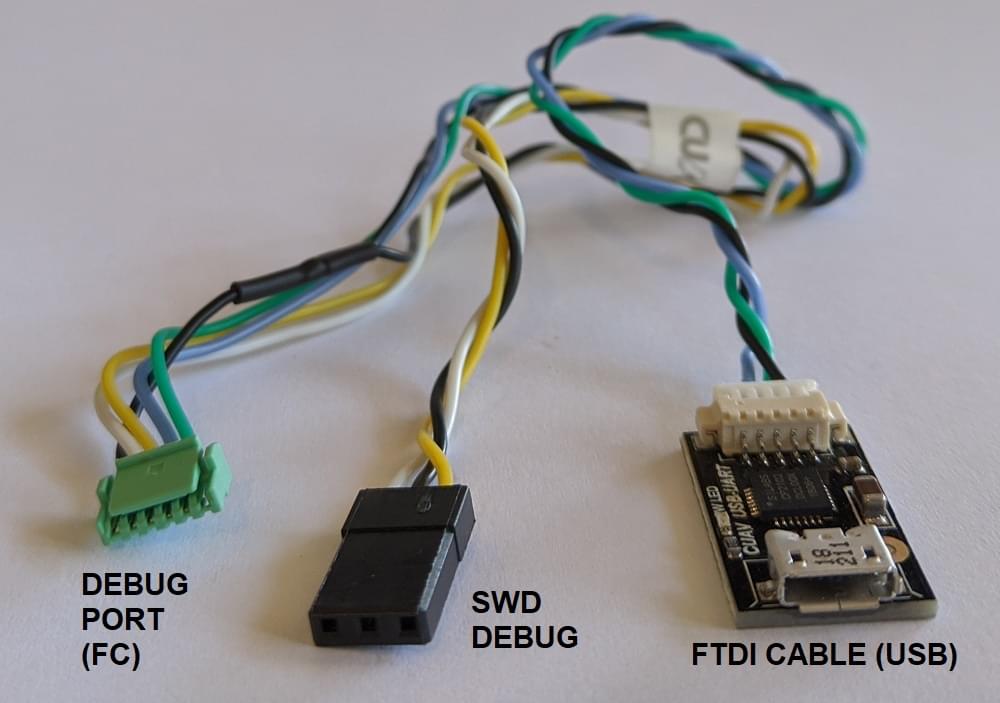
Консоль послідовного доступу до системи та інтерфейс SWD працюють через порт DSU7. Просто підключіть кабель FTDI до роз'єму DSU7 (у списку продуктів є кабель CUAV FTDI).
Системна консоль PX4 та інтерфейс SWD працюють через порт FMU Debug (DSU7).
Відладочний порт (DSU7) використовує роз'єм JST BM06B і має наступну розводку:
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | 5V+ | +5В |
| 2 (blk) | DEBUG TX (OUT) | +3.3В |
| 3 (blk) | DEBUG RX (IN) | +3.3В |
| 4 (blk) | FMU_SWDIO | +3.3В |
| 5 (blk) | FMU_SWCLK | +3.3В |
| 6 (blk) | GND | GND |
CUAV надає спеціальний відладочний кабель, який можна підключити до порту DSU7. Він розділяє кабель FTDI для підключення PX4 System Console до USB-порту комп'ютера і виводи SWD, які використовуються для налагодження SWD/JTAG. Відладочний кабель, що входить до комплекту, не підключається до контакту (1) порту SWD Vref.
WARNING
Вивід Vref SWD (1) використовує 5В як Vref, але процесор працює при напрузі 3,3В!
Деякі JTAG-адаптери (SEGGER J-Link) використовують напругу Vref для встановлення напруги на лініях SWD. Для прямого підключення до Segger Jlink ми рекомендуємо використовувати 3,3 вольта з контакту 4 роз'єму з позначкою DSM/SBUS/RSSI для забезпечення Vtref на JTAG (тобто для забезпечення 3,3 В і NOT 5 В).
Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний набір підтримуваних конфігурацій можна переглянути в Довіднику авіаційних платформ.