Holybro Pixhawk 4
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення або відповідності вимогам.
Pixhawk 4® це просунутий автопілот, розроблений та виготовлений у співпраці між Holybro® та командою PX4. Він оптимізований для роботи з PX4 v1.7 та пізніших версій, і підходить для академічних та комерційних розробників.
Він базується на відкритому апаратному дизайні Pixhawk-project FMUv5 та виконує PX4 на операційній системі NuttX.

![]()
TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Короткий опис
- Основний FMU Processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO процесор: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- Бортові сенсори:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055 або ICM20602
- Magnetometer: IST8310
- Barometer: MS5611
- GPS: u-blox Neo-M8N GPS/GLONASS приймач; інтегрований магнетометр IST8310
- Інтерфейси:
- 8-16 PWM виводів (8 з IO, 8 з FMU)
- 3 виділених PWM/Capture входи на FMU
- Виділений R/C вхід для CPPM
- Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- Виділений S.Bus серво вивід
- 5 загальних послідовних портів
- 3 I2C порти
- 4 SPI шини
- До 2 CAN шин для подвійного CAN з послідовним ESC
- Аналогові входи для напруги / струму з 2 акумуляторів
- Система живлення:
- Вивід модуля живлення: 4.9~5.5V
- Живлення USB входу: 4.75~5.25V
- Вхід сервоприводу: 0~36V
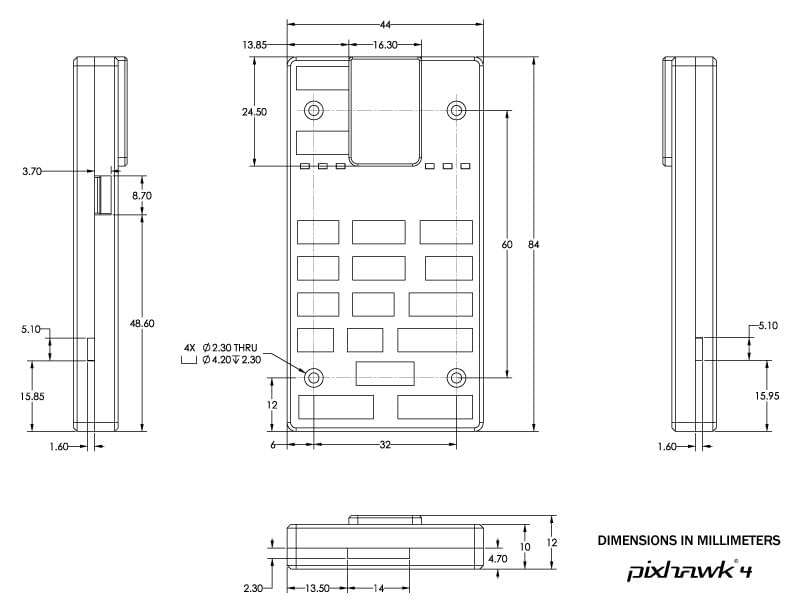
- Вага та розміри:
- Вага: 15.8g
- Розміри: 44x84x12мм
- Інші Характеристики:
- Температура роботи: -40 ~ 85°c
Додаткову інформацію можна знайти в Технічному довіднику Pixhawk 4.
Де купити
Замовляйте на Holybro.
З’єднання

WARNING
Порти DSM/SBUS RC та PPM RC призначені лише для RC приймачів. Вони працюють на електроживленні! НІКОЛИ не підключайте до нього жодних сервоприводів, джерел живлення або батарей (або до будь-якого підключеного приймача).
Схема розташування виводів
Завантажте схему розташування виводів Pixhawk 4 звідси.
Призначення контактів роз'ємів відбувається зліва направо (тобто Pin 1 - це найлівіший контакт). Виняток становить порт(и) відладки (pin 1 є найправішим, як показано нижче).
Налаштування послідовного порту
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | TELEM4 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Розміри
Номінальна напруга
Pixhawk 4 може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини живлення: POWER1, POWER2 та USB.
Вихідні потужності FMU PWM OUT та I/O PWM OUT (0V до 36V) не живлять плату політного контролера (і не живляться ним). Ви повинні подавати живлення на один з POWER1, POWER2 або USB, інакше плата буде знеживлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 та POWER2 входи (4.9V до 5.5V)
- Вхід USB (4.75V до 5.25V)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 та POWER2 входи (робочий діапазон 4.1V до 5.7V, 0V до 10V без пошкоджень)
- USB вхід (операційний діапазон 4.1V до 5.7V, 0V до 6V без пошкоджень)
- Вхід серводвигуна: контакт VDD_SERVO FMU PWM OUT та I/O PWM OUT (0V до 42V без пошкоджень)
Збірка / налаштування
Швидкий старт з підключення Pixhawk 4 надає інструкції щодо збірки необхідних/важливих периферійних пристроїв, включаючи GPS, плату управління живленням тощо.
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v5_defaultВідладочний порт
Системна консоль PX4 та SWD interface працюють на порту FMU Debug, тоді як отримати доступ до I/O console та SWD interface можна через порт I/O Debug. Для доступу до цих портів користувач має зняти корпус Pixhawk 4.
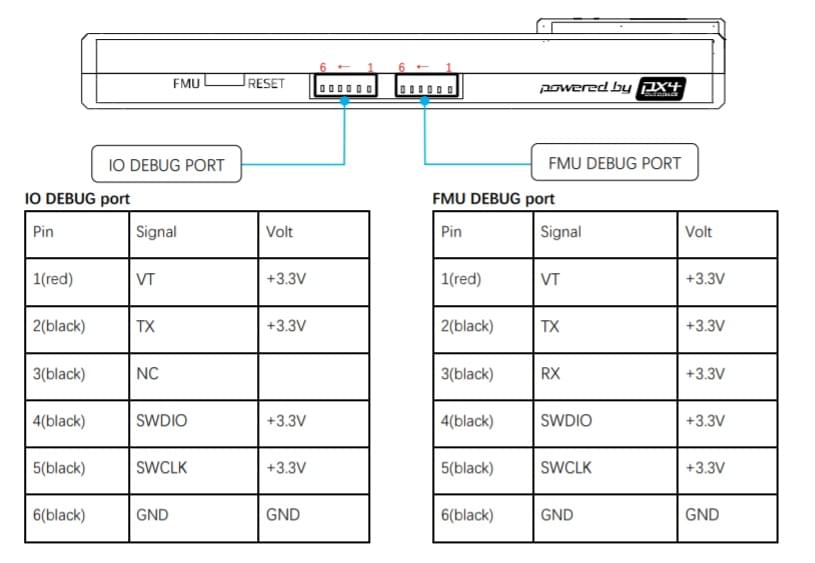
Розводка використовує стандартний Pixhawk debug connector pinout. Для отримання інформації про з'єднання дивіться:
Периферія
Підтримувані платформи / шасі
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний перелік підтримуваних конфігурацій можна переглянути в розділі Довідник планерів.