Конфігурація завершення польоту
Дія аварійного зупинення польоту може бути викликана автономною захисною дією (наприклад, втрата зв'язку з радіокеруванням, порушення геозони тощо на будь-якому типі транспортного засобу або у будь-якому режимі польоту), або виявником відмов.
Аварійне припинення польоту також може бути викликане з наземної станції або компаньйонного комп'ютера за допомогою команди MAVLink MAV_CMD_DO_FLIGHTTERMINATION. Це відправляється, наприклад, коли ви викликаєте методи MAVSDK Action plugin terminate() або terminate_async().
Коли активується аварійне припинення польоту, PX4 одночасно вимикає всі контролери та встановлює всі виходи PWM у значення аварійного режиму.
Залежно від підключених пристроїв, вихідні значення аварійного режиму PWM можуть бути використані для:
- Розгорніть парашут.
- Витягнути втягуючі стійки шасі.
- Перемістіть гімбал, підключений до PWM, в безпечне положення (або втягніть його), щоб захистити камеру.
- Запустіть надувний пристрій, наприклад подушку безпеки.
- Запустити тривогу.
Немає можливості відновлення після аварійного припинення польоту. Після виклику аварійного припинення польоту вам слід якнайшвидше відключити батарею. Перед тим, як знову використовувати транспортний засіб, вам доведеться перезавантажити/вимкнути живлення.
TIP
PX4 не знає, які пристрої безпеки приєднані - він просто застосовує заздалегідь визначений набір значень ШІМ до своїх виходів.
TIP
Значення аварійної безпеки застосовуються до всіх виходів під час завершення. Немає способу налаштувати незалежне тригерування моторів або конкретних пристроїв безпеки на основі часу (або іншого критерію).
Це не незалежна Система аварійного припинення польоту. Якщо втрачається живлення або автопілот повністю відмовляє, аварійні пристрої не будуть активовані.
Конфігурація апаратного забезпечення
Будь-який пристрій безпеки (наприклад, парашут), який може бути активований зміною значення PWM, може бути використаний та підключений до будь-якого вільного порту PWM (як MAIN, так і AUX).
INFO
Якщо ви використовуєте плату серії Pixhawk, вам доведеться окремо живити рейку сервопривода (наприклад, з 5V BEC, який часто також доступний з вашого регулятора обертів).
Конфігурація програмного забезпечення
Тема Безпека пояснює, як встановити аварійне припинення польоту як дію в разі аварії, що має бути виконана для певної перевірки аварійного стану.
Виявник відмов також (опційно) може бути налаштований на активацію аварійного припинення польоту, якщо транспортний засіб перекидається (перевищує певний кут нахилу) або якщо виявлена відмова зовнішньою автоматичною системою спрацьовування (ATS):
- Увімкніть виявник відмов під час польоту, встановивши CBRK_FLIGHTTERM=0.
- Безпека > Виявник відмов > Спрацювання нахилу пояснює, як налаштувати межі нахилу, які спрацьовують Аварійне припинення польоту. :::note Під час зльоту, занадто великі кути крену або тангажу спричинять блокування (вимкнення двигунів, але без активації парашута), а не аварійне припинення польоту. Це завжди активовано, незалежно від значення
CBRK_FLIGHTTERM. ::: - Безпека > Зовнішня автоматична система спрацьовування (ATS) пояснює, як налаштувати зовнішню систему спрацьовування.
Для кожного основного виходу, до якого підключений пристрій безпеки, де "n" - номер порту PWM, встановіть:
- PWM_MAIN_DISn до значення "OFF" PWM пристрою.
- PWM_MAIN_FAILn до значення PWM пристрою "ON".
Для кожного AUX виходу, до якого підключений пристрій безпеки, де "n" - номер порту PWM, встановіть:
- PWM_AUX_DIS1 до значення PWM пристрою "OFF".
- PWM_AUX_FAILn до значення PWM пристрою "ON".
Нарешті, встановіть значення PWM для портів PWM_AUX_FAILn та PWM_MAIN_FAILn для будь-яких двигунів.
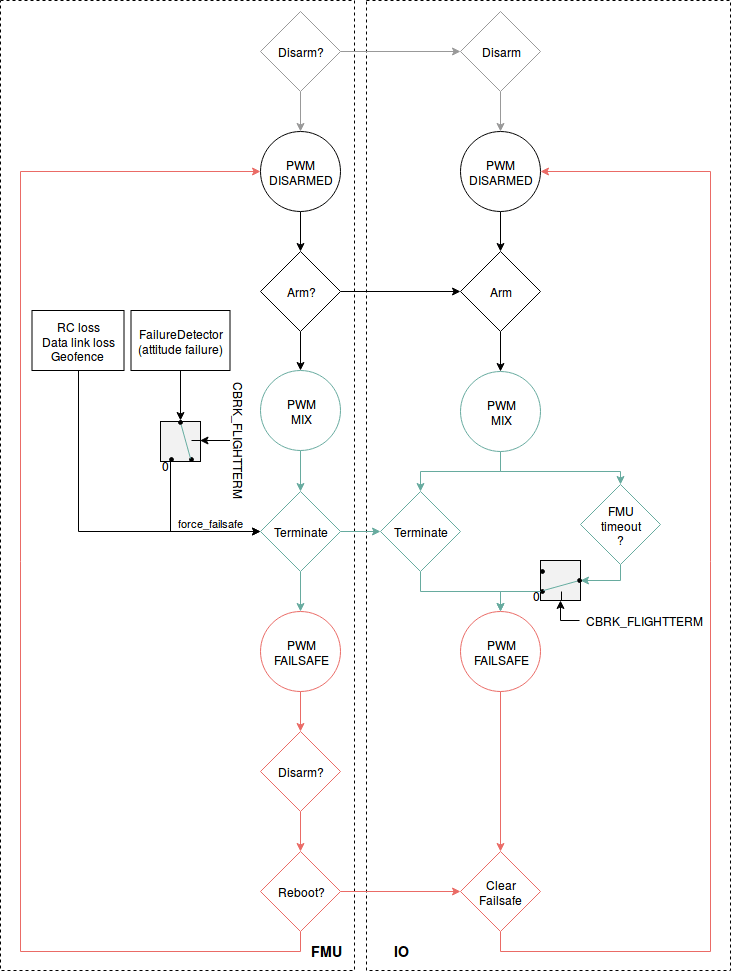
Схема логіки
Діаграма нижче показує логічний порядок дій щодо припинення польоту.