Holybro Durandal
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки обладнання або питань сумісності.
Durandal® є останньою оновленою версією успішної родини контролерів польоту від Holybro. Він був розроблений і розроблений Holybro.

На високому рівні, основними функціями є:
- Інтегроване керування температурою для датчиків.
- Потужний мікроконтролер STM32H7 працює на 480МГц. 2 МБ відеопам'яті і 1 МБ ОЗП.
- Нові датчики з підвищеною стабільністю температури.
- Внутрішня система ізоляції вібрації.
- На платі є два високопродуктивних, малошумних ІМП (інерціальних вимірювачів кутової швидкості), призначених для вимогливих застосувань стабілізації.
Підсумок ключових функцій, збірката покупка можна знайти нижче.
:::note Цей контролер польоту підтримується виробником. :::
Короткий опис
Технічні характеристики
- Головний FMU процесор: STM32H743
- 32 Bit Arm ®️ Cortex®️ -M7, 480 MHz, 2MB пам'яті, 1 МБ ОЗУ
- IO Processor: STM32F100
- 32 Bit Arm ®️ Cortex®️ -M3, 24MHz, 8KB SRAM
- Сенсори на платі
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI088 or ICM20602
- Mag: IST8310
- Барометр МS5611
- GPS: u-blox Neo-M8N GPS/ГЛОНАСС приймач; інтегрований магнетометр IST8310
Інтерфейси
- 8-13 PWM виходи сервоприводів (8 з IO, 5 з FMU)
- 6 спеціалізованих PWM/Capture входів на FMU
- Спеціалізований R/C вхід для Spektrum / DSM
- Спеціалізований R/C вхід для CPPM і S.Bus
- Спеціалізований S.Bus вихід і аналоговий / PWM RSSI
- 5 основних послідовних портів
- 3 з повним контролем потоку
- 1 з відокремленням 1.5A поточної межі
- 3 I2C порти
- 4 SPI buses
- 1 внутрішній bus датчика високої швидкості SPI з 4 обраними чіпами і 6 DRDY
- 1 внутрішній низько шумовий bus SPI виділений для XXX
- Барометр з 2-ма чіпами, не DRDY
- 1 внутрішній SPI bus, виділений для FRAM
- Підтримує контроль температури, розташований на модулі сенсорів
- 1 зовнішній bus SPI
- До 2 CANBuses для подвійного CAN
- Кожен CANBus має окреме керування тихим контролером або ESC RX-MUX
- Аналогові входи для напруги / струму з 2 акумуляторів
- 2 додаткових аналогових входи
Електричні дані
- Вивід енергомодуля 4.9~5.5 В
- Максимальна вхідна напруга: 6 В
- Максимальний струм у значенні: 120 A
- Живлення USB: 4.75~5.25 В
- Вхід сервоприводу: 0~36 В
Механічні дані
- Розміри: 80x45x20.5мм
- Вага: 68.8g
Інші Характеристики
- Температура роботи: ~40~85C
- Температура зберігання: -40~85C
- CE
- FCC
- Сумісний із RoHS (без свинцю)
Більше інформації читайте в: Durandal Technical Data Sheet.
Де купити
Замовляйте з Holybro.
З'єднання
Місця розташування портів/з'єднань показані тут (і нижче у розділі виводів).
Верх
Перед
Тил
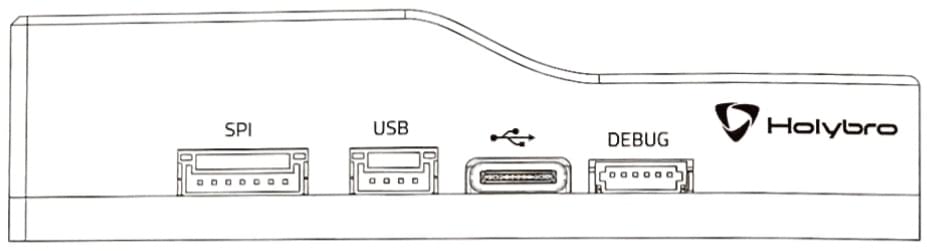
Праворуч
Ліворуч
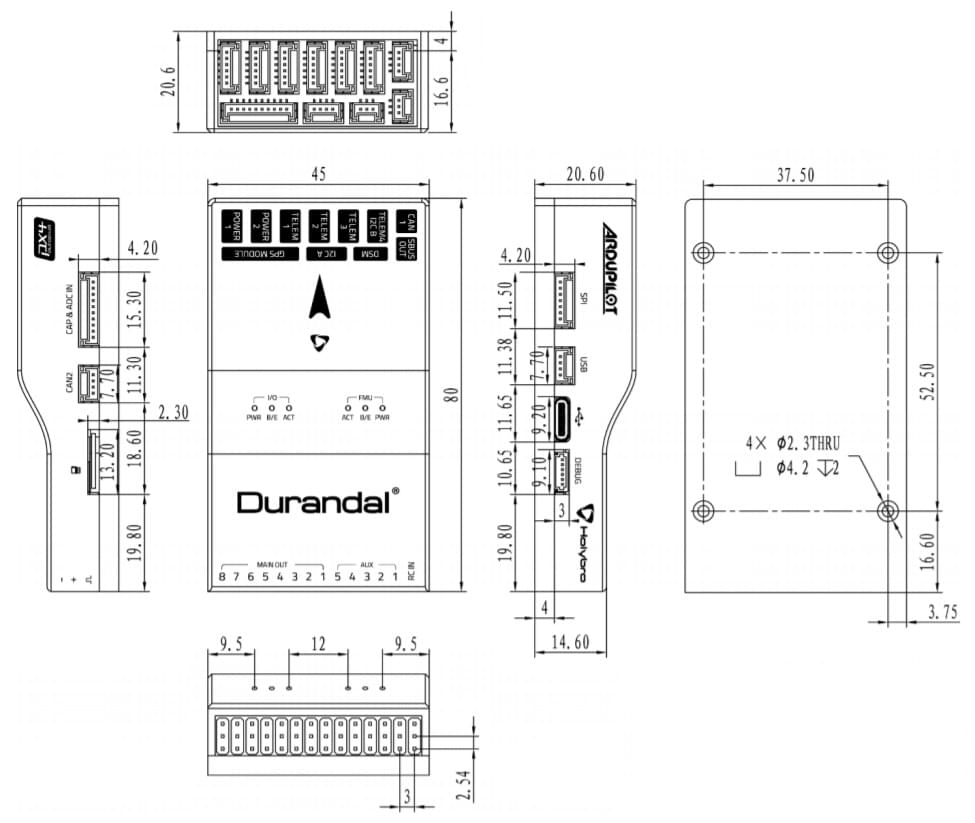
Розміри
Усі розміри в міліметрах.
Зборка/інсталяція
Durandal Wiring Quick Start надає інструкції щодо збирання необхідних/важливих периферійних пристроїв, таких як GPS, плата управління живленням тощо.
Створення прошивки
TIP
Більшості користувачів не потрібно свторювати цю прошивку! Вона запрограмована та автоматично встановлюється програмою QGroundControl, коли підключено відповідне обладнання.
Щоб зібрати PX4 для цієї цілі:
make holybro_durandal-v1_defaultЗіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS1 |
| USART2 | /dev/ttyS1 | TELEM1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | TELEM4/GPS2 |
| USART6 | /dev/ttyS4 | TELEM3 |
| UART7 | /dev/ttyS5 | Debug Console |
| UART8 | /dev/ttyS6 | PX4IO |
Дебаг Порт
Системна консоль PX4 та інтерфейс SWD працюють на Дебаг порті.
Виводи та роз'єми відповідають інтерфейсу Pixhawk Debug Mini, визначеному в Стандарті роз'ємів Pixhawk.
Для підключення та налагодження дивіться посилання вище.
:::note Немає дебаг порту для плати I/O. :::
Периферія
Підтримувані платформи / Планери
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus.
Повний набір підтримуваних конфігурацій можна переглянути в розділі Довідник про планери.
Схема розташування виводів
Нижче наведені виводи Durandal. Їх також можна завантажити звідси.
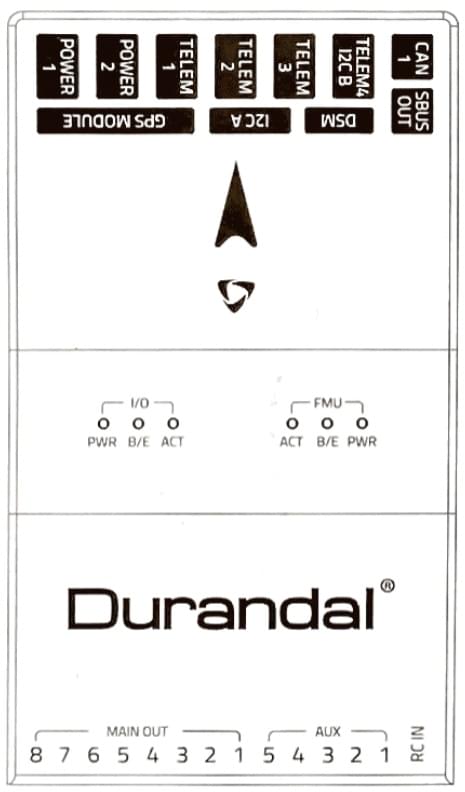
Верхні виводи
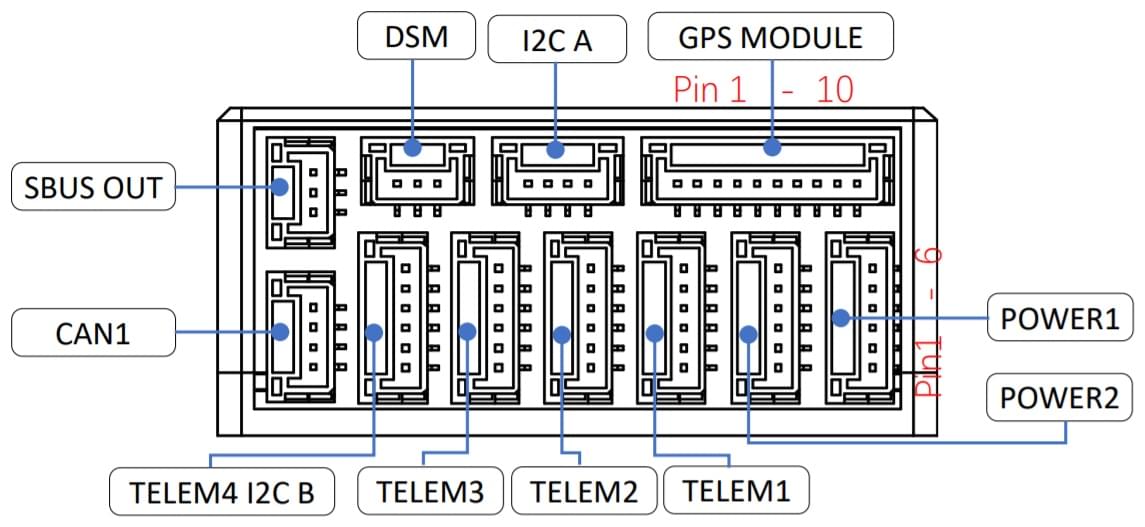
Передні виводи
SUBS вихідний порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | - | - |
| 2 (жовтий) | SBUS_OUT/RSSI_IN | +3.3В |
| 3 (чорний) | GND | GND |
DSM RC порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VDD_3V3 | +3.3В |
| 2 (жовтий) | DSM_IN | +3.3В |
| 3 (чорний) | GND | GND |
I2C A порти
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | SCL4 | +3.3В |
| 3 (чорний) | SDA4 | +3.3В |
| 4 (чорний) | GND | GND |
CAN1 порт
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | CAN H | +3.3В |
| 3 (чорний) | CAN L | +3.3В |
| 4 (чорний) | GND | GND |
Порт GPS
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | Tx (вивід) | +3.3В |
| 3 (чорний) | Rx (вхід) | +3.3В |
| 4 (чорний) | SCL1 | +3.3В |
| 5 (чорний) | SDA1 | +3.3В |
| 6 (чорний) | SAFETY_SWITCH | +3.3В |
| 7 (чорний) | SAFETY_SWITCH_LED | +3.3В |
| 8 (чорний) | VDD_3V3 | +3.3В |
| 9 (чорний) | BUZZER | +5В |
| 10 (чорний) | GND | GND |
TELEM4 I2CB порти
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | Tx (вивід) | +3.3В |
| 3 (чорний) | Rx (вхід) | - |
| 4 (чорний) | SCL2 | - |
| 5 (чорний) | SDA2 | +3.3В |
| 6 (чорний) | GND | GND |
TELEM3, TELEM2, TELEM1 порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | TX (вивід) | +3.3В |
| 3 (чорний) | RX (вхід) | +3.3В |
| 4 (чорний) | CTS (вхід) | +3.3В |
| 5 (чорний) | RTS (вивід) | +3.3В |
| 6 (чорний) | GND | GND |
Порт живлення
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | VCC | +5В |
| 3 (чорний) | CURRENT | +3.3В |
| 4 (чорний) | VOLTAGE | +3.3В |
| 5 (чорний) | GND | GND |
| 6 (чорний) | GND | GND |
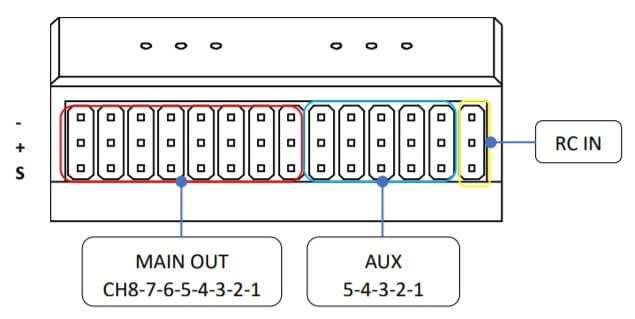
Задні розпіновки
ОСНОВНИЙ вихід
| Pin | Сигнал | Вольтаж | + | - |
|---|---|---|---|---|
| 1 | IO_CH1 | +3.3В | VDD_SERVO | GND |
| 2 | IO_CH2 | +3.3В | VDD_SERVO | GND |
| 3 | IO_CH3 | +3.3В | VDD_SERVO | GND |
| 4 | IO_CH4 | +3.3В | VDD_SERVO | GND |
| 5 | IO_CH5 | +3.3В | VDD_SERVO | GND |
| 6 | IO_CH6 | +3.3В | VDD_SERVO | GND |
| 7 | IO_CH7 | +3.3В | VDD_SERVO | GND |
| 8 | IO_CH8 | +3.3В | VDD_SERVO | GND |
Вихід AUX
| Pin | Сигнал | Вольтаж | + | - |
|---|---|---|---|---|
| 1 | FMU_CH1 | +3.3В | VDD_SERVO | GND |
| 2 | FMU_CH2 | +3.3В | VDD_SERVO | GND |
| 3 | FMU_CH3 | +3.3В | VDD_SERVO | GND |
| 4 | FMU_CH4 | +3.3В | VDD_SERVO | GND |
| 5 | FMU_CH5 | +3.3В | VDD_SERVO | GND |
Вхід Радіосигналу
| Pin | Сигнал | Вольтаж |
|---|---|---|
| S | SBUS_IN/PPM_IN | +3.3В |
| + | VCC | +5В |
| - | GND | GND |
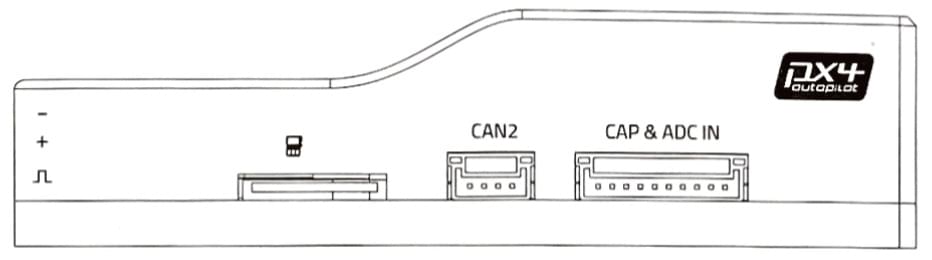
Правостороння розпіновка
CAN2 порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | CAN H | +3.3В |
| 3 (чорний) | CAN L | +3.3В |
| 4 (чорний) | GND | GND |
CAP & ADC IN порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | FMU_CAP6 | +3.3В |
| 3 (чорний) | FMU_CAP5 | +3.3В |
| 4 (чорний) | FMU_CAP4 | +3.3В |
| 5 (чорний) | FMU_CAP3 | +3.3В |
| 6 (чорний) | FMU_CAP2 | +3.3В |
| 7 (чорний) | FMU_CAP1 | +3.3В |
| 8 (чорний) | ADC1_SPARE_1 | +3.3В ++ |
| 9 (чорний) | ADC1_SPARE_2 | +6,6В ++ |
| 10 (чорний) | GND | GND |
WARNING
Сенсори, підключені до виводів 8 та 9, не повинні надсилати сигнал, що перевищує вказану напругу.
Лівостороння розпіновка
DEBUG порт
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (червоний) | VT | +3.3В |
| 2 (чорний) | TX | +3.3В |
| 3 (чорний) | RX | +3.3В |
| 4 (чорний) | SWDIO | +3.3В |
| 5 (чорний) | SWCLK | +3.3В |
| 6 (чорний) | GND | GND |
SPI порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VCC | +5В |
| 2 (чорний) | SCK | +3.3В |
| 3 (чорний) | MISO | +3.3В |
| 4 (чорний) | MOSI | +3.3В |
| 5 (чорний) | CS1 | +3.3В |
| 6 (чорний) | CS2 | +3.3В |
| 7 (чорний) | GND | GND |
USB порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (червоний) | VBUS | +5В |
| 2 (чорний) | DM | +3.3В |
| 3 (чорний) | DP | +3.3В |
| 4 (чорний) | GND | GND |