Світи Gazebo Classic
Цей розділ надає зображення/інформацію про світи Gazebo Classic, що підтримуються PX4.
Світ empty.world відтворюється за замовчуванням, хоча це може бути заміщено світом відповідним до моделі. Розробники також можуть вручну вказати світ для завантаження: Gazebo Classic > Завантаження певного світу.
Вихідний код світів, що підтримуються можна знайти на GitHub тут: PX4/PX4-SITL_gazebo-classic/tree/main/worlds.
Порожній (за замовчуванням)
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/empty.world
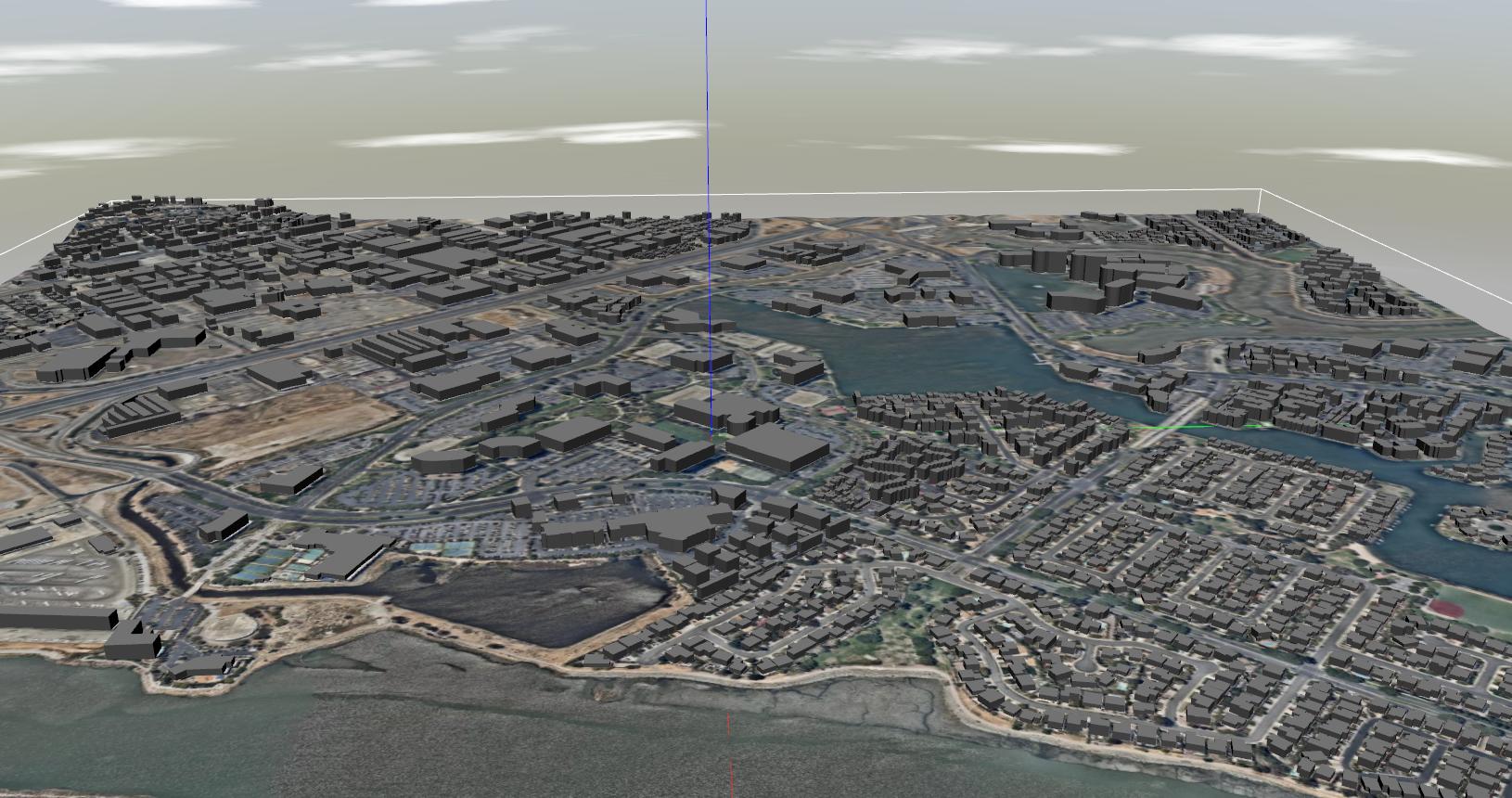
Baylands
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/baylands.world
Аеропорт KSQL
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/ksql_airport.world
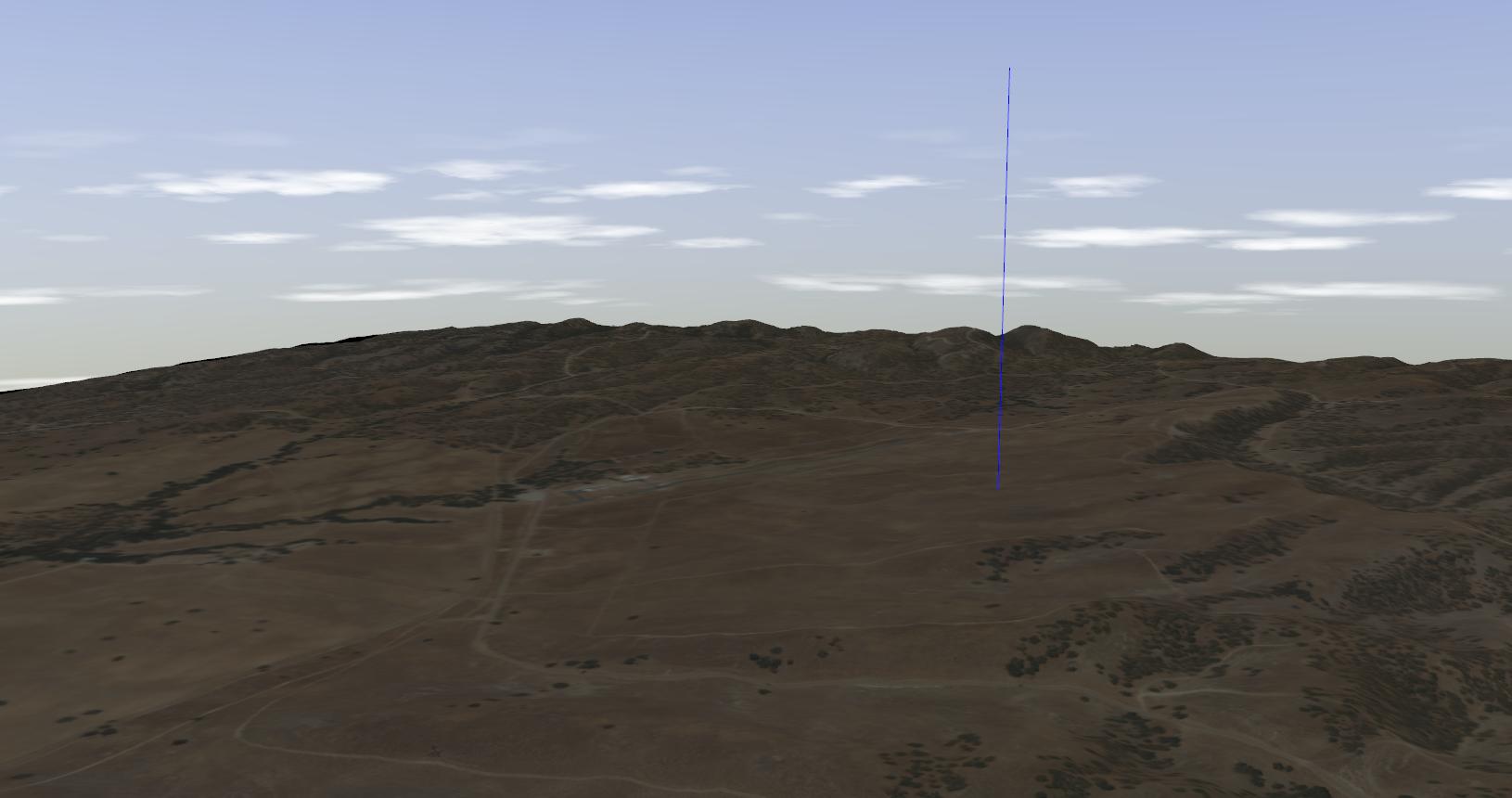
Літовище McMillan
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/mcmillan_airfield.world
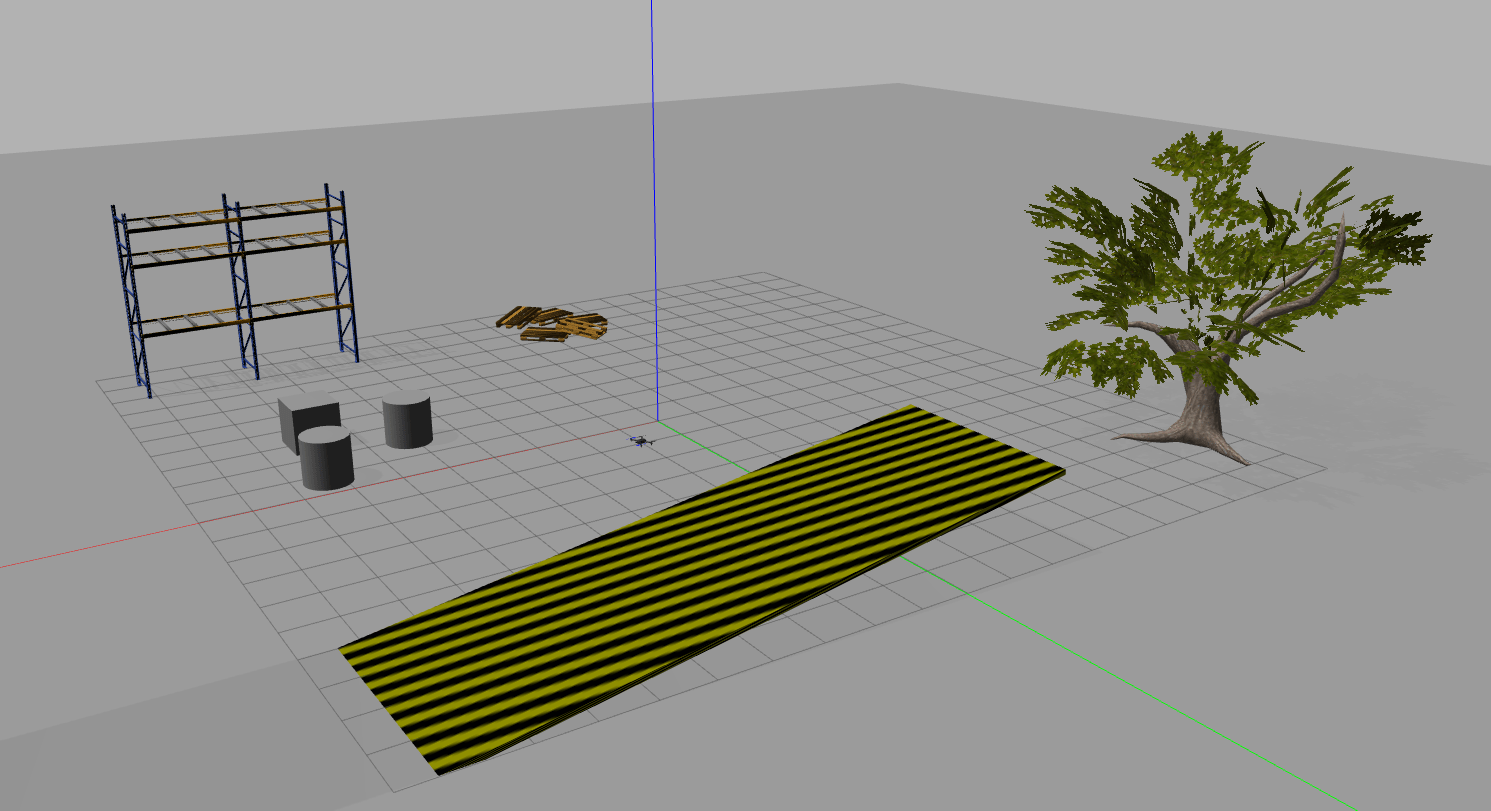
Безпечна посадка
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/safe_landing.world
Гоночна траса Sonoma
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/sonoma_raceway.world 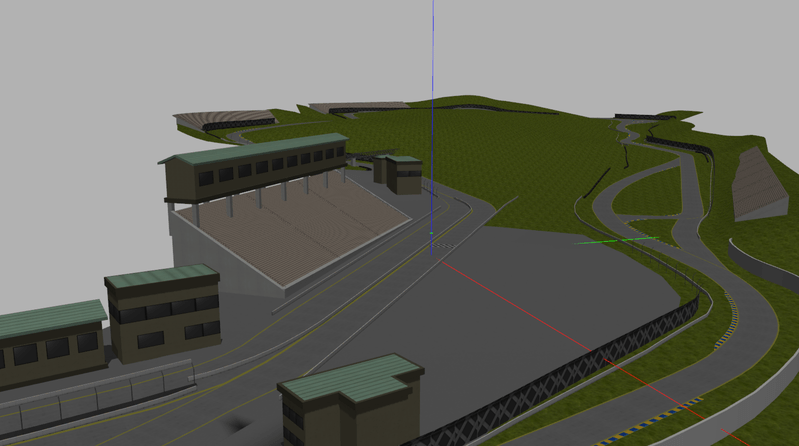
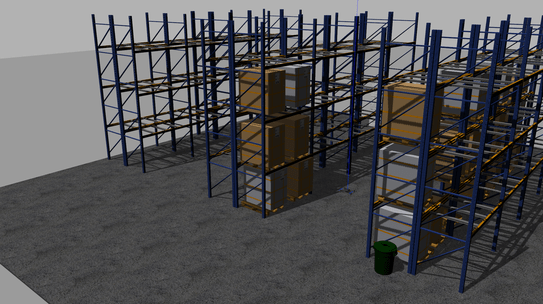
Склад
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/warehouse.world
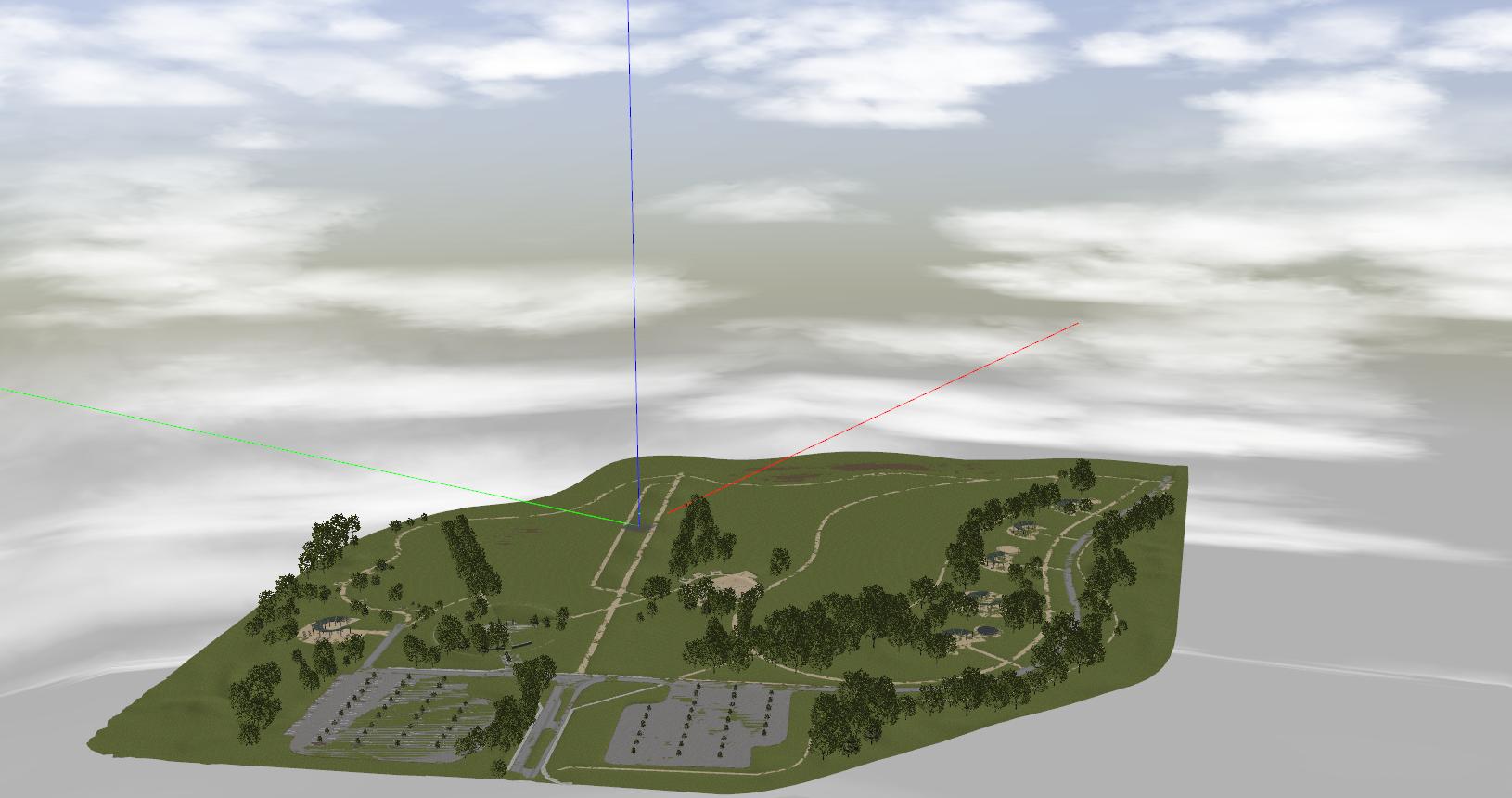
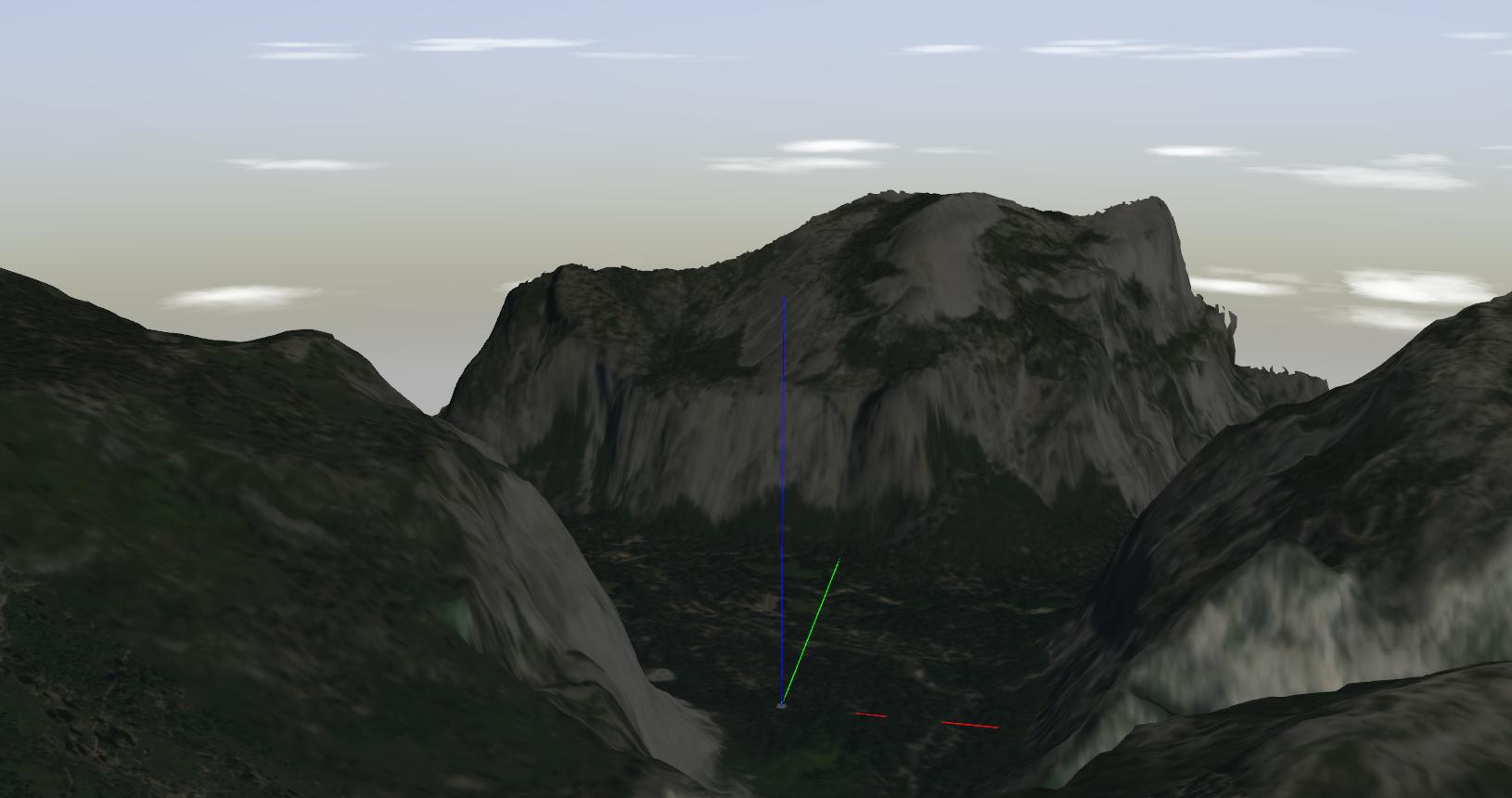
Yosemite
PX4/PX4-SITL_gazebo-classic/tree/main/worlds/yosemite.world
Світи певний моделей
Деякі моделі засобів покладаються на фізику/плагіни певного світу. Інструментарій PX4 автоматично відтворить світ, який має те ж ім'я що і модель засобу якщо він присутній (замість empty.world за замовчуванням):
Світи певних моделей:
- boat.world: включає поверхню для симуляції плавучості човна.
- uuv_hippocampus.world: порожній світ, що використовується для симуляції підводного середовища для підводного засобу HippoCampus.
- typhoon_h480.world: Використовується моделлю засобу Typhoon H480 (Гексакоптер) та включає відео віджет, щоб увімкнути/вимкнути трансляцію відео. Цей світ включає плагін gazebo для симуляції камери.
- iris_irlock.world: включає ІЧ маяк для тестування точної посадки.