Holybro Pixhawk 6X-RT
WARNING
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Pixhawk 6X-RT® є останнім оновленням успішної серії політних контролерів Pixhawk®, розроблених та виготовлених у співпраці між Holybro®, командою NXP's mobile robotics та командою PX4 на основі відкритого дизайну NXP.
Він базується на Pixhawk® Autopilot FMUv6X Standard, Autopilot Bus Standard, та Connector Standard.
Оснащений високопродуктивним процесором NXP i.mx RT1176 dual core, модульним дизайном, потрійним резервуванням, платою IMU з контролем температури, ізольованими доменами сенсорів, що забезпечує неймовірну продуктивність, надійність та гнучкість.


TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Введення
Всередині Pixhawk® 6X-RT ви можете знайти NXP i.mx RT1176, поєднаний з сенсорною технологією від Bosch®, InvenSense®, що надає вам гнучкість і надійність для керування будь-яким автономним апаратом, придатним як для академічних, так і для комерційних застосувань.
Двоядерний MCU в Pixhawk® 6X-RT i.mx RT1176 Crossover містить ядро Arm® Cortex®-M7 до 1GHz і ядро Arm® Cortex®-M4 до 400MHz, має 2MB SRAM та зовнішню XIP Flash обсягом 64MB. Автопілот PX4 використовує переваги збільшеної потужності та оперативної пам’яті. Завдяки збільшеній потужності обробки розробники можуть бути більш продуктивними та ефективними у своїй роботі з розробкою, що дозволяє використовувати складні алгоритми та моделі.
Відкритий стандарт FMUv6X включає високоефективні, низькошумні IMU на платі, розроблені для кращої стабілізації. IMU з потрійним резервуванням та барометр з подвійним резервуванням на окремих шинах. Коли PX4 виявляє відмову датчика, система плавно перемикатися на інший, щоб забезпечити надійність керування польотом.
Незалежний LDO живить кожен набір сенсорів з незалежним керуванням живленням. Система ізоляції вібрації для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних вимірювань, що дозволяє апаратам досягти кращих загальних польотних характеристик.
Зовнішня шина датчиків (SPI5) має дві лінії вибору чипів та сигнали готовності даних для додаткових датчиків та корисного навантаження з інтерфейсом SPI, а також з інтегрованим Microchip Ethernet PHY, високошвидкісний обмін даними з комп'ютерами місії через ethernet тепер можливий.
Pixhawk®️sco6X-RT ідеально підходить для розробників корпоративних дослідницьких лабораторій, стартапів, академічних потреб (досліджень, професорів, студентів) та комерційного застосування.
Ключові пункти дизайну
- Високопродуктивний NXP i.MX RT1170 1GHz Crossover MCU з ядрами Arm® Cortex®
- Апаратний захисний елемент NXP EdgeLock SE051 є розширенням надійного EdgeLock SE050 Plug & Trust сімейства захисних елементів, підтримує оновлення аплетів на місці та забезпечує перевірену безпеку, сертифіковану відповідно до CC EAL 6+, з AVA_VAN.5 до рівня ОС, для надійного захисту від останніх сценаріїв атак. Наприклад, для безпечного зберігання ідентифікатора оператора або сертифікатів.
- Модульний політний контролер: розділені IMU, FMU та базова система, з'єднані за допомогою роз'ємів Pixhawk® Autopilot Bus на 100 контактів та 50 контактів.
- Резервність: 3x датчики IMU та 2x датчики барометра на окремих шинах
- Потрійне резервування доменів: повністю ізольовані сенсорні домени з окремими шинами та окремим керуванням живленням
- Нова система ізоляції вібрацій для фільтрації високочастотних вібрацій та зменшення шуму для забезпечення точних вимірювань
- Інтерфейс Ethernet для високошвидкісної інтеграції комп'ютера місії
- IMU контролюються за допомогою нагрівальних резисторів на борту, що дозволяє досягти оптимальної робочої температури IMU
Процесори та датчики
- FMU процесор: NXP i.MX RT1176
- 32 Bit Arm® Cortex®-M7, 1GHz
- 32 Bit Arm® Cortex®-M4, 400MHz вторинне ядро
- 64MB зовнішньої флеш пам'яті
- 2MB RAM
- Апаратний захисний елемент NXP EdgeLock SE051
- Сертифіковано згідно з вимогами IEC62443-4-2
- 46 kB користувацької пам'яті з опціями персоналізації до 104 kB
- Сертифіковане рішення Groundbreaking CC EAL6+ для IoT
- AES та 3DES шифрування і дешифрування
- IO процесор: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- Бортові сенсори
- Accel/Gyro: ICM-20649 або BMI088
- Accel/Gyro: ICM-42688-P
- Accel/Gyro: ICM-42670-P
- Mag: BMM150
- Barometer: 2x BMP388
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 6V
- Вхід USB Power: 4.75~5.25V
- Вхід Servo Rail: 0~36V
- Номінальний струм:
TELEM1обмежувач вихідного струму: 1.5A- Комбінований обмежувач вихідного струму всіх інших портів: 1.5A
Механічні дані
- Розміри
- Модуль політного контролера: 38.8 x 31.8 x 14.6mm
- Стандартна базова плата: 52.4 x 103.4 x 16.7mm
- Міні базова плата: 43.4 x 72.8 x 14.2 mm
- Вага
- Модуль політного контролера: 23g
- Стандартна базова плата: 51g
- Міні базова плата: 26.5g
Інтерфейси
16- PWM серво виводів
R/C вхід для Spektrum / DSM
Виділений R/C вхід для PPM та S.Bus вхід
Спеціалізований аналоговий / PWM вхід RSSI та вивід S.Bus
4 загальних послідовних порти
- 3 з повним контролем потоку
- 1 з окремим обмеженням струму 1.5A (Telem1)
- 1 з I2C та додатковою лінією GPIO для зовнішнього NFC зчитувача
2 порти GPS
- 1 повний GPS плюс порт запобіжного перемикача
- 1 базовий порт GPS
1 I2C порт
1 порт Ethernet
- Transformerless Applications
- 100Mbps
1 шина SPI
- 2 лінії вибору чіпу
- 2 лінії готових даних
- 1 лінія SPI SYNC
- 1 лінія SPI reset
2 CAN шини для CAN периферії
- CAN шина має individual silent controls або ESC RX-MUX control
2 порти вводу живлення з SMBus
- 1 AD та IO порт
- 2 додаткових аналогових входи
- 1 PWM/Capture вхід
- 2 виділені відладочні та GPIO лінії
Інші характеристики:
- Температура роботи та зберігання: -40 ~ 85°c
Де придбати
Замовляйте на Holybro.
Збірка / налаштування
Швидкий старт з підключення Pixhawk 6X надає інструкції щодо збірки необхідних/важливих периферійних пристроїв, включаючи GPS, модуль живлення тощо.
З'єднання
Зразок схеми з'єднань
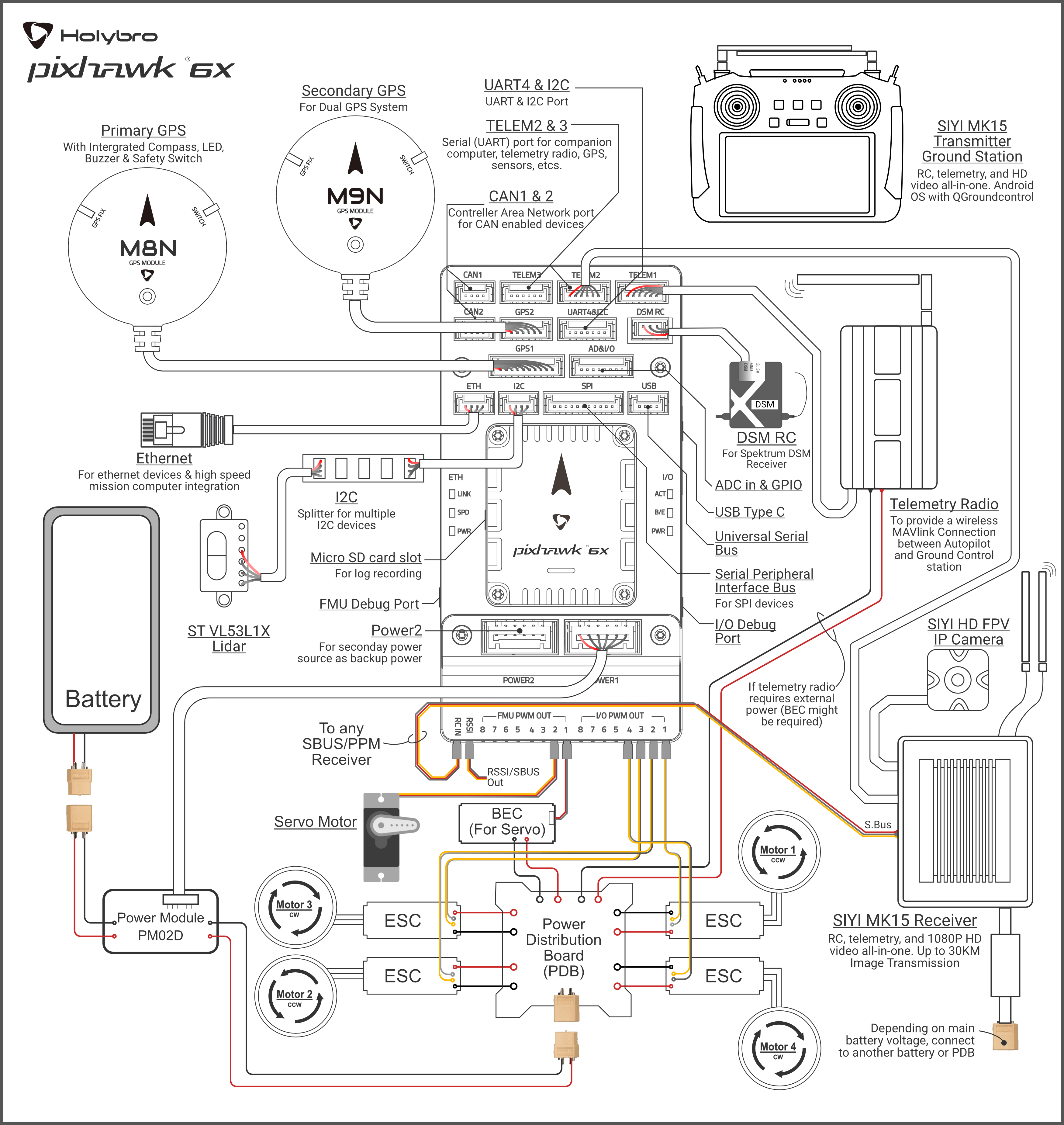
Розводка
Примітки:
- Контакт захоплення камери (
PI0) це контакт 2 на порту AD&IO, позначений вище якFMU_CAP1.
Зіставлення послідовних портів
| UART | Device | Port |
|---|---|---|
| UART1 | /dev/ttyS0 | Debug |
| UART3 | /dev/ttyS1 | GPS |
| UART4 | /dev/ttyS2 | TELEM1 |
| UART5 | /dev/ttyS3 | GPS2 |
| UART6 | /dev/ttyS4 | PX4IO |
| UART8 | /dev/ttyS5 | TELEM2 |
| UART10 | /dev/ttyS6 | TELEM3 |
| UART11 | /dev/ttyS7 | External |
Розміри
Номінальна напруга
Pixhawk 6X-RT може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини живлення: POWER1, POWER2 і USB. Порти POWER1 та POWER2 на Pixhawk 6X використовують 6 circuit 2.00mm Pitch CLIK-Mate Wire-to-Board PCB Receptacle.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 та POWER2 входи (4.9V до 5.5V)
- USB вхід (4.75V до 5.25V)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної енергії (не буде працювати), але залишиться неушкодженою.
- POWER1 і POWER2 входи (робочий діапазон від 4.1V до 5.7V, від 0V до 10V без пошкоджень)
- USB вхід (операційний діапазон від 4.1V до 5.7V, від 0V до 6V без пошкоджень)
- Серво вхід: пін VDD_SERVO FMU PWM OUT та I/O PWM OUT (від 0V до 42V без пошкоджень)
Моніторинг напруги
Цифровий I2C моніторинг акумулятора увімкнено за замовчуванням (див. Швидкий старт > Живлення).
INFO
Аналоговий моніторинг батареї через ADC не підтримується на цій платі, але може підтримуватися в варіантах цього політного контролера з іншою базовою платою.
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цього контролера:
make px4_fmu-v6xrt_defaultВідладочний порт
Системна консоль PX4 та інтерфейс SWD працюють на порту FMU Debug.
Розпиновка та конектор відповідають інтерфейсу Pixhawk Debug Full, визначеному в інтерфейсі Pixhawk Connector Standard (конектор JST SM10B).
| Пін | Сигнал | Вольт |
|---|---|---|
| 1 (червоний) | Vtref | +3.3V |
| 2 (чорний) | Console TX (OUT) | +3.3V |
| 3 (чорний) | Console RX (IN) | +3.3V |
| 4 (чорний) | SWDIO | +3.3V |
| 5 (чорний) | SWCLK | +3.3V |
| 6 (чорний) | SWO | +3.3V |
| 7 (чорний) | NFC GPIO | +3.3V |
| 8 (чорний) | PH11 | +3.3V |
| 9 (чорний) | nRST | +3.3V |
| 10 (чорний) | GND | GND |
Інформацію про використання цього порту див:
- SWD Debug Port
- Системна консоль PX4 (Зауважте, що консоль FMU зіставляється з USART3).
Периферія
Підтримувані платформи / шасі
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний перелік підтримуваних конфігурацій можна переглянути в розділі Довідник планерів.