Контролер польоту CubePilot Cube Yellow
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки обладнання або питань сумісності.
Контролер польоту Cube Yellow - це гнучкий автопілот, призначений в першу чергу для виробників комерційних систем.

Контролер призначений для використання зі специфічною для домену несучою платою, щоб зменшити кількість дротів, підвищити надійність і спростити збірку. Наприклад, несуча плата для комерційного інспекційного автомобіля може містити з'єднання для комп'ютера-компаньйона, тоді як несуча плата для гонщика може містити ESC для рами апарату.
Cube має віброізоляцію на двох IMU, з третім фіксованим IMU в якості еталонного/резервного.
TIP
Документація виробника Cube Docs містить детальну інформацію, включаючи огляд Різниця між Cube Colours.
Основні характеристики
- 32bit STM32F777VI (32-бітний ARM Cortex M7, 400 MHz, Flash 2МБ, RAM 512 КБ).
- 32-бітний відмовостійкий співпроцесор STM32F103
- 14 ШІМ / серво виходів (8 з відмовостійкими і ручним керуванням, 6 допоміжних, сумісних з великими потужностями)
- Широкі можливості підключення додаткових периферійних пристроїв (UART, I2C, CAN)
- Інтегрована система резервного копіювання для відновлення в польоті та ручного керування з виділеним процесором та автономним джерелом живлення (для літаків з фіксованим крилом)
- Резервна система інтегрує систему мікшування, забезпечуючи узгоджені режими автопілота та ручного заміщення ( для літаків з фіксованим крилом)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - багатоколірний світлодіод
- Потужний багатотональний п'єзозвуковий індикатор
- карта microSD для високошвидкісної фіксації даних протягом тривалого періоду часу
Де купити
Монтаж
Специфікації
- Процесор:
- STM32F777VI (32-бітний ARM Cortex M7)
- 400 МГц
- 512 KB MB RAM
- 2 MB Flash
- Відмовостійкий співпроцесор:
- STM32F100 (32біт ARM Cortex-M3)
- 24 МГц
- 8 KB SRAM
- Датчики: (всі підключені через SPI)
- Акселерометр: (3) ICM20948, ICM20649, ICM20602
- Гіроскоп: (3) ICM20948, ICM20649, ICM20602
- Компас: (1) ICM20948
- Барометричний датчик тиску: (2) MS5611
- Умови експлуатації:
- Робоча температура: від -10C до 55C
- Степень захисту IP/Водонепроникність: Не водонепроникний
- Вхідна напруга серворейки: 3,3В / 5В
- Вхід USB-порту:
- Напруга: 4В - 5.7В
- Номінальний струм: 250 мА
- POWER:
- Вхідна напруга: 4.1В - 5.7В
- Номінальний вхідний струм: 2,5 А
- Номінальна вхідна/вихідна потужність: 14 Вт
- Розміри:
- Cube: 38.25 мм x 38.25 мм x 22.3 мм
- Carrier: 94,5 мм x 44,3 мм x 17,3 мм
- Інтерфейси
- Порти вводу-виводу: 14 ШІМ-виходів сервоприводів (8 від IO, 6 від FMU)
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN (один з внутрішнім 3.3V трансивером, один на конекторі розширювача)
- Входи ПДУ (пульт дистанційного управління):
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible вхід
- Futaba S.BUS® вхід і вихід
- Вхід сигналу PPM-SUM
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3В АЦП вхід
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
Розпіновки та схеми
Схеми плат та іншу документацію можна знайти тут: Проект Cube.
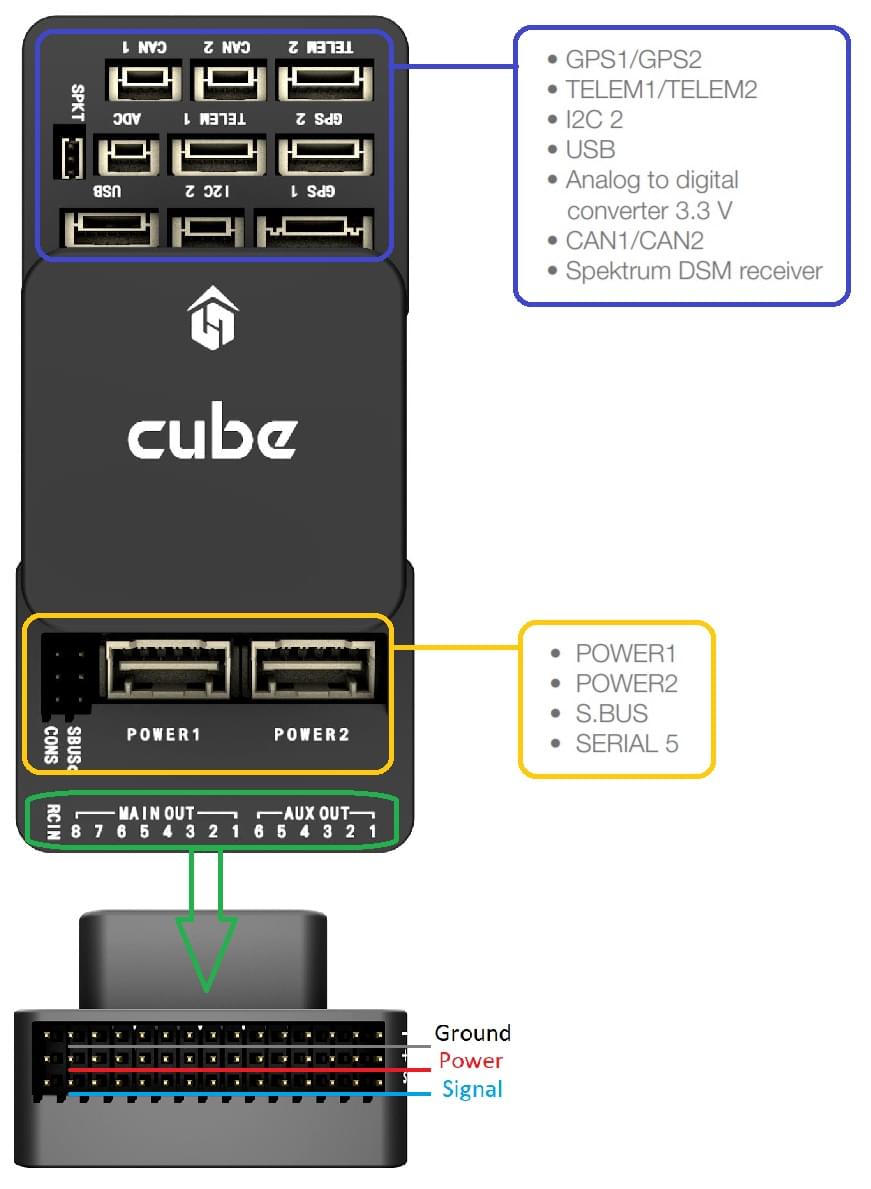
Порти
Верхня частина (GPS, TELEM тощо)
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART2 | /dev/ttyS0 | TELEM1 (контроль потоку) |
| USART3 | /dev/ttyS1 | TELEM2 (контроль потоку) |
| UART4 | /dev/ttyS2 | GPS1 |
| USART6 | /dev/ttyS3 | PX4IO |
| UART7 | /dev/ttyS4 | CONSOLE/ADSB-IN |
| UART8 | /dev/ttyS5 | GPS2 |
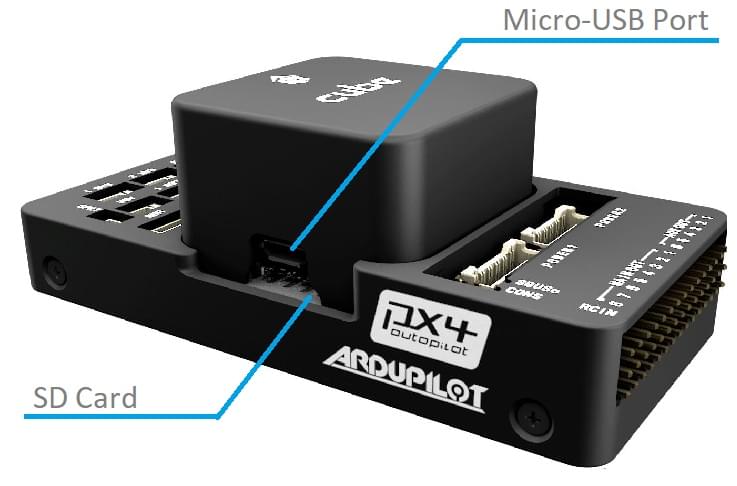
Відладочні порти

Порти USB/SDCard
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цієї цілі:
make cubepilot_cubeyellowПроблеми
Розташування символів CAN1 і CAN2 на кубі перевернуте (CAN1 - це CAN2 і навпаки).
Додаткова інформація/документація
- Cube Wiring Quickstart
- Cube Docs (виробник):