Підключення RC-приймача до автопілота на базі Linux PX4
Ця тема показує, як налаштувати автопілот на базі Linux PX4 для підключення та використання підтримуваного RC-приймача на будь-якому серійному порту
Для типів RC, крім S.Bus, ви можете просто під'єднати приймач безпосередньо до серійних портів або до USB через USB до TTY серійного кабелю (наприклад, PL2302 USB в Serial TTL)
Для отримувача S.Bus (або кодера - наприклад, від Futaba, RadioLink тощо) вам зазвичай потрібно підключити приймач та пристрій через схему інвертування сигналу, але в іншому випадку налаштування залишається таким же.
Тоді Запустіть PX4 RC драйвер на пристрої, як показано нижче.
Запуск драйвера
Щоб запустити драйвер RC в певному UART (наприклад, в цьому випадку /dev/ttyS2):
sh
rc_input start -d /dev/ttyS2Для іншої інформації про використання драйвера дивися: rc_input.
Схема інвертування сигналу (лише для S.Bus)
S.Bus - це інвертований сигнал комунікації UART.
Хоча деякі серійні порти / контролери польоту можуть читати інвертований сигнал UART, більшість вимагає схеми інвертування сигналу між приймачем та серійним портом для деінвертації сигналу.
TIP
Ця схема також необхідна для зчитування сигналів дистанційного керування S.Bus через послідовний порт або USB-до-TTY конвертер послідовного порту.
У цьому розділі показано, як створити відповідну схему.
Необхідні компоненти
- 1x NPN транзистор (наприклад, NPN S9014 TO92)
- 1x 10K резистор
- 1x 1K резистор
INFO
Можна використовувати будь-який тип/модель транзистора, оскільки струм споживання дуже низький.
Схема Діаграми/Підключення
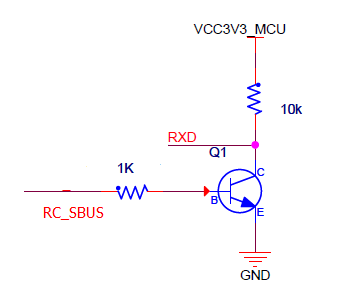
Підключіть компоненти, як описано нижче (і показано на схемі):
- S.Bus сигнал → 1K резистор → база NPN транзистора
- NPN транзистора емітер → GND
- 3.3VCC → резистор 10K → колектор NPN транзистора → rxd USB-to-TTY
- 5.0VCC → S.Bus VCC
- GND → S.Bus GND
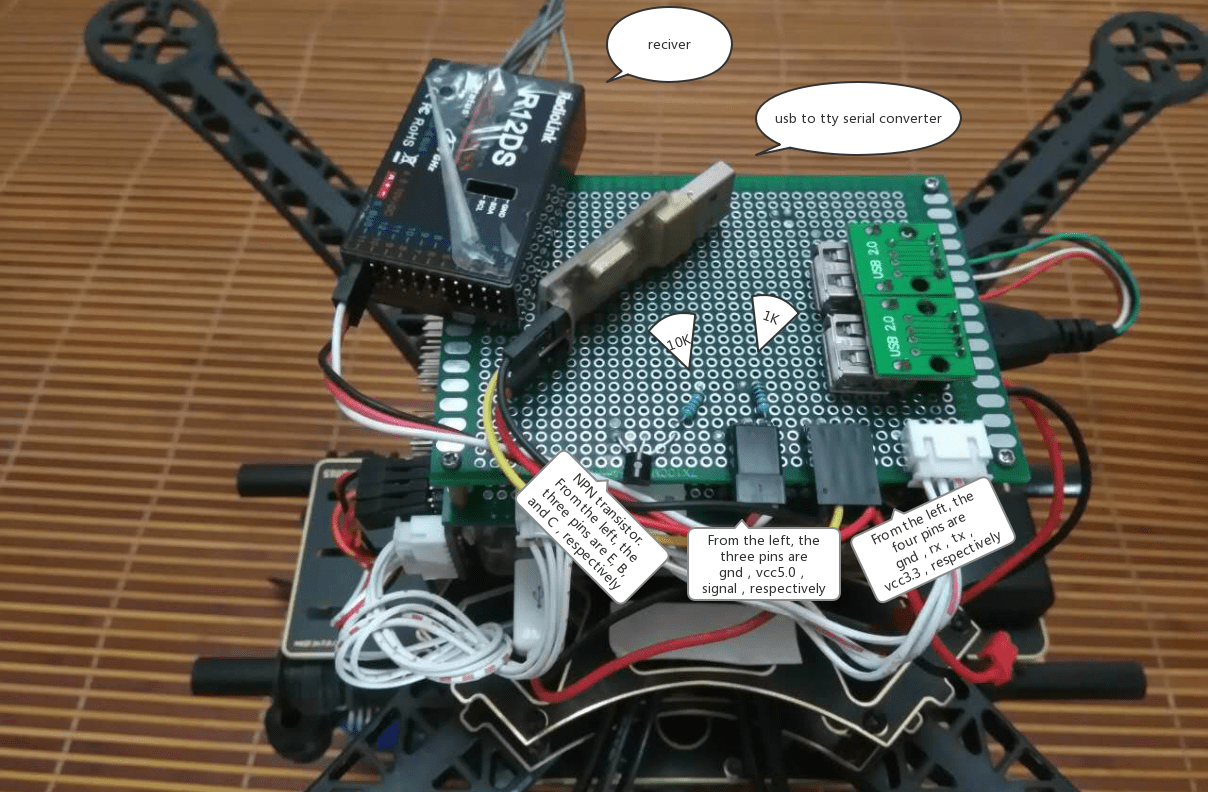
На зображенні нижче показано підключення на дошці для макету.