Omnibus F4 SD
WARNING
Цей політний контролер був знятий з виробництва і більше не продається комерційно.
WARNING
PX4 не виробляє цей (чи будь-який інший) автопілот. Звертайтесь до виробника з питань щодо підтримки або відповідності.
Omnibus F4 SD - це плата контролера, розроблена для гонщиків. На відміну від звичайної гоночної дошки, вона має деякі додаткові функції, такі як SD-карта та швидший процесор.

Ось основні відмінності в порівнянні з Pixracer:
- Нижча ціна
- Менше портів вводу/виводу (хоча все ще можна підключити GPS або датчик потоку, наприклад)
- Для зовнішнього GPS потрібен зовнішній підтягувальний резистор на шині I2C, див. I2C нижче.
- Менше ОЗП (192 КБ проти 256 КБ) та FLASH (1 МБ проти 2 МБ)
- Ті ж розміри плати, що й у Pixracer, але трохи менший форм-фактор (тому що в неї менше роз'ємів)
- Інтегрований OSD (ще не реалізований у програмному забезпеченні)
TIP
Усі звичайні функції PX4 все ще можна використовувати для вашого гонщика!
Цей польотний контролер підтримується виробником.
Основні характеристики
- Основний System-on-Chip: STM32F405RGT6
- CPU: 168 МГц ARM Cortex M4 з одноточним FPU
- RAM: 192 KB SRAM
- FLASH: 1 МБ
- Стандартний гоночний форм-фактор: 36x36 мм зі стандартним розміром отворів 30,5 мм
- MPU6000 Акселератор / Гіроскоп
- BMP280 Baro (встановлений не на всі плати)
- microSD (логування)
- Futaba S.BUS і S.BUS2 / Spektrum DSM2 і DSMX / Graupner SUMD / PPM input / Yuneec ST24
- OneShot PWM (налаштовується)
- Вбудований датчик струму
- Вбудований чіп OSD (AB7456 через SPI)
Де придбати
Дошка виробляється різними вендорами, з деякими варіаціями (наприклад, з барометром або без нього).
PX4 сумісний з платами, які підтримують таргет Betaflight OMNIBUSF4SD (якщо на сторінці продукту вказано OMNIBUSF4SD, то плата повинна працювати з PX4).
TIP
Будь-яка похідна з міткою Omnibus F4 (наприклад, клон) також повинна працювати. Однак розподіл живлення на цих платах має різну якість.
Ось дошки, які були протестовані і відомо, що працюють:
Hobbywing XRotor Flight Controller F4
Ця плата встановлюється на Hobbywing XRotor Micro 40A 4in1 ESC без пайки. Ця плата ESC також забезпечує живлення для плати Omnibus.
:::
Купуйте у:
Original Airbot Omnibus F4 SD
Купуйте у:
Аксесуари в комплекті:
- ESP8266 WiFi модуль для телеметрії MAVLink. Потрібно підключити ці контакти: GND, RX, TX, VCC та CH-PD (CH-PD до 3,3В). Швидкість передачі даних становить 921600.
Конектори
Плати від різних виробників (на основі цього дизайну) можуть мати дуже різні макети. Макети / Silkscreen-и для різних версій показані нижче.
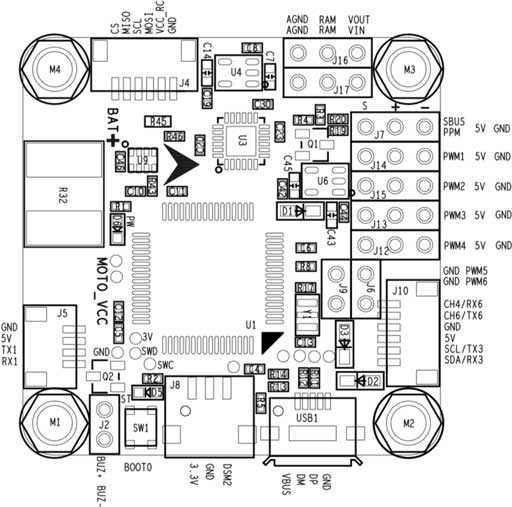
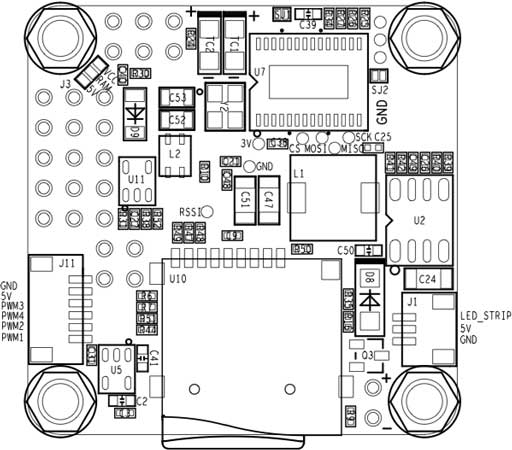
Airbot Omnibus F4 SD
Нижче подані silkscreen-и для Airbot Omnibus F4 SD (V1), що показують як верхню, так і нижню частину.
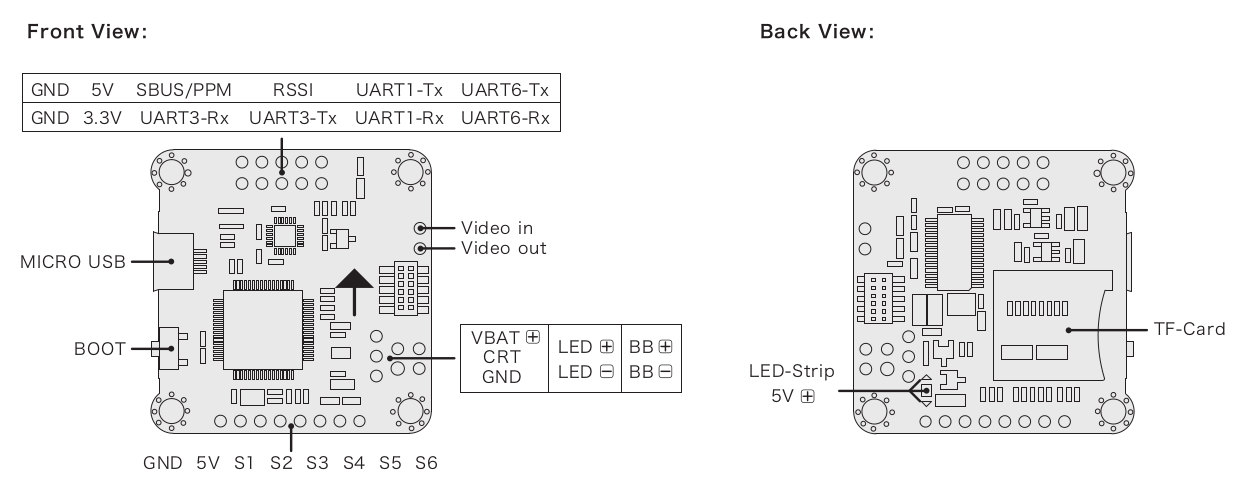
Hobbywing XRotor Flight Controller F4
Нижче наведені silkscreen-и для Hobbywing XRotor Flight Controller F4.
Розпіновка
Радіоуправління
RC підключений до одного з наступних портів:
- UART1
- Порт SBUS/PPM (через інвертор, йде до UART1)
INFO
Деякі плати Omnibus F4 мають перемикач, який з'єднує MCU SBUS та PPM з одним роз'ємом для контактів. Встановіть ваш перемикач або припойте перемичку до відповідного контакту MCU перед використанням.
UARTs
UART6: Порт GPS
TX: MCU pin PC6
RX: MCU pin PC7
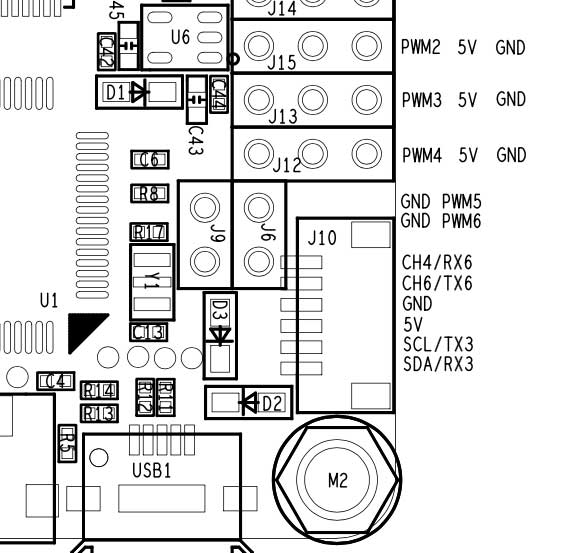
Airbot Omnibus F4 SD знаходиться на порту J10 (TX6/RX6):
UART4
- TX: MCU pin PA0
- RX: MCU pin PA1
- 57600 baud
- Це може бути налаштовано як порт
TELEM 2. - Airbot Omnibus F4 SD Pinout:
- TX: RSSI pin
- RX: PWM out 5
I2C
Є один доступний порт I2C через:
- SCL: Пін MCU PB10 (може мати мітку TX3)
- SDA: пін MCU PB11 (може мати напис RX3)
INFO
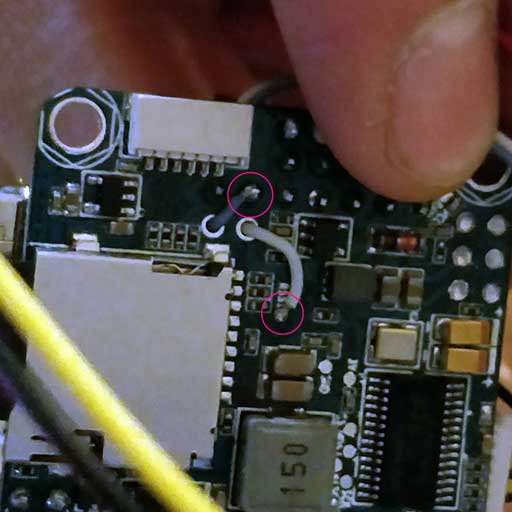
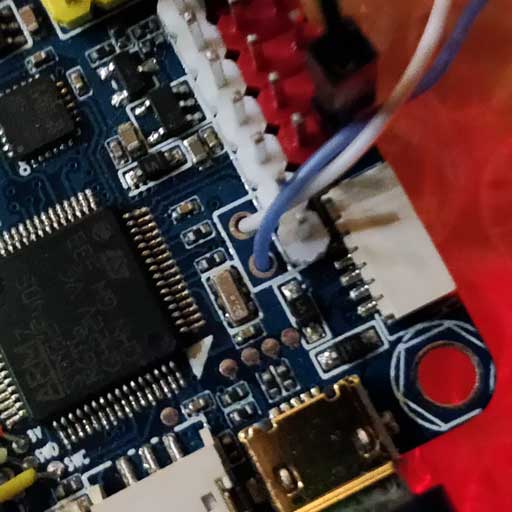
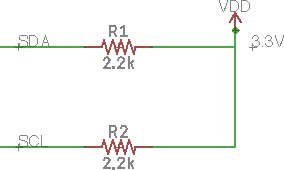
Вам знадобляться зовнішні підтяжки на обох сигналах (годинник та дані). Ви можете використовувати 2,2 тис. підтяжок, наприклад, щоб прикріпити зовнішню магнітолу.
- Airbot Omnibus F4 SD знаходиться на порту J10 (SCL [clock] / SCA [data]):
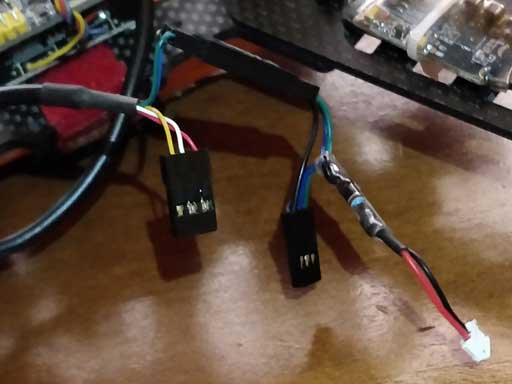
Ось приклад імплементації. Я використовував штекер Spektrum, щоб отримати 3,3 В від порту DSM, підключаючи лише 3,3 В + до кожної лінії через резистор 2,2к.
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | SerialRX |
| USART4 | /dev/ttyS1 | TELEM1 |
| USART6 | /dev/ttyS2 | GPS |
RC Телеметрія
Omnibus підтримує телеметрію до передавача RC за допомогою FrSky Telemetry або CRSF Crossfire Telemetry.
Телеметрія CRSF (TBS Crossfire Telemetry)
TBS CRSF Telemetry може бути використана для передачі телеметричних даних з контролера польоту (положення літака, батареї, режим польоту та GPS-дані) на дистанційну радіостанцію, таку як Taranis.
Переваги порівняно з телеметрією FrSky, включають:
- Лише один UART потрібен для RC та телеметрії.
- Протокол CRSF оптимізований для низької затримки.
- 150 Гц частота оновлення RC.
- Сигнали неінвертовані, тому не потрібна (зовнішня) логіка інвертора.
INFO
Якщо ви використовуєте CRSF Telemetry, вам знадобиться створити власну прошивку PX4. На відміну від цього, телеметрія FrSky може використовувати завчасно побудоване програмне забезпечення.
Для Omnibus ми рекомендуємо TBS Crossfire Nano RX, оскільки він спеціально розроблений для малих квадрокоптерів.
На ручному пульті керування (наприклад, Taranis) вам також знадобиться модуль передавача. Це можна підключити ззаду до пульта радіо керування.
INFO
Зазначені посилання вище містять документацію для модулів TX/RX.
Встановлення
Підключіть контакти Nano RX та Omnibus, як показано:
| Omnibus UART1 | Nano RX |
|---|---|
| TX | Ch2 |
| RX | Ch1 |
Наступне оновіть модулі TX/RX для використання протоколу CRSF та налаштуйте телеметрію. Інструкції з цього наведені в Посібнику TBS Crossfire (шукайте 'Налаштування радіо для CRSF').
Налаштування CRSF PX4
Вам потрібно буде створити власну прошивку, щоб використовувати CRSF. Для отримання додаткової інформації див. CRSF Telemetry.
Схема
Схеми надає Airbot: OmnibusF4-Pro-Sch.pdf.
Оновлення завантажувача PX4
Плата поставляється із заздалегідь встановленою Betaflight. Перед встановленням прошивки PX4 необхідно прошити заванажувач PX4. Завантажте завантажувальний бінарний файл omnibusf4sd_bl.hex та прочитайте цю сторінку для інструкцій з прошивки.
Створення прошивки
Щоб зібрати PX4 для цієї цілі:
make omnibus_f4sd_defaultВстановлення прошивки PX4
Ви можете використовувати або готове вбудоване програмне забезпечення, або власне користувацьке програмне забезпечення.
WARNING
Якщо ви використовуєте CRSF Telemetry у вашій радіосистемі, як описано вище, то вам потрібно використовувати власну прошивку.
Прошивку можна встановити будь-якими звичайними способами:
Джерело для збірки та завантаження
make omnibus_f4sd_default uploadЗавантажте прошивку за допомогою QGroundControl.
Налаштування
Крім основних налаштувань, важливі наступні параметри:
| Параметр | Налаштування |
|---|---|
| SYS_HAS_MAG | Це має бути вимкнено, оскільки у платі немає внутрішнього магніту. Ви можете активувати це, якщо приєднаєте зовнішній магніт. |
| SYS_HAS_BARO | Вимкніть це, якщо ваша плата не має барометра. |
Додаткова інформація
Ця сторінка надає хороший огляд з контактами та інструкціями щодо налаштування.