Holybro Pix32 v5
PX4 не виробляє цей (чи будь-який) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Pix32 v5® є передовим автопілотом керування польотом, розробленим і виготовленим компанією Holybro®. Він оптимізований для роботи з прошивкою PX4, яка призначена як для академічних, так і для комерційних розробників. Він базується на відкритому апаратному дизайні Pixhawk-project FMUv5 та запускає PX4 на операційній системі NuttX. Це можна вважати варіантом версії Pixhawk4.
Pix32 v5 розроблено для пілотів, які потребують потужності, гнучкої та настроюваної системи керування польотами. Він складається з окремого контролера польоту та базової плати, які з'єднані 100-контактним роз'ємом. Цей дизайн дозволяє користувачам вибирати базову плату від Holybro або налаштовувати свою власну.

Цей польотний контролер підтримується виробником.
Короткий опис
- Головний FMU процесор: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB memory, 512KB RAM
- IO Processor: STM32F100
- 32 Bit Arm®️ Cortex®️-M3, 24MHz, 8KB SRAM
- Сенсори на платі:
- Accel/Gyro: ICM-20689
- Accel/Gyro: BMI055 або ICM20602
- Магнітометр: IST8310
- Барометр: MS5611
- GPS: u-blox Neo-M8N GPS/ГЛОНАСС приймач; інтегрований магнетометр IST8310
- Інтерфейси:
- 8-16 PWM виходи (8 із IO, 8 із FMU)
- 3 спеціалізованих PWM/Capture входів на FMU
- Спеціалізований R/C вхід для CPPM
- Спеціалізований R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM входом RSSI
- Спеціалізований S.BUS вивід сервоприводу
- 5 основних послідовних портів
- 2 з повним контролем потоку
- 1 з відокремленням 1.5A поточної межі
- 3x I2C порти
- 4 шини SPI
- 1 внутрішня шина датчика високої швидкості SPI з 4 обраними чіпами і 6 DRDY
- 1 внутрішня SPI шина, виділена для
- Барометр з 2-ма чіпами, не DRDY
- 1 внутрішня шина SPI виділена для FRAM
- Підтримує спеціалізовану SPI калібрування EEPROM, розташовану на модулі сенсорів
- 1 зовнішня шина SPI
- До 2 CANBus для подвійного CAN з послідовним ESC
- Кожна CAN шина має індивідуальне керування шумом або ESC RX-MUX контроль
- Аналогові входи для напруги / струму з 2 батарей
- 2 додаткових аналогових входи
- Електрична система:
- Вивід енергомодуля 4.9~5.5 В
- Максимальна вхідна напруга: 6 В
- Максимальний струм у значенні: 120 A
- Живлення USB входу: 4.75~5.25V
- Вхід сервоприводу: 0~36 В
- Вага та розміри:
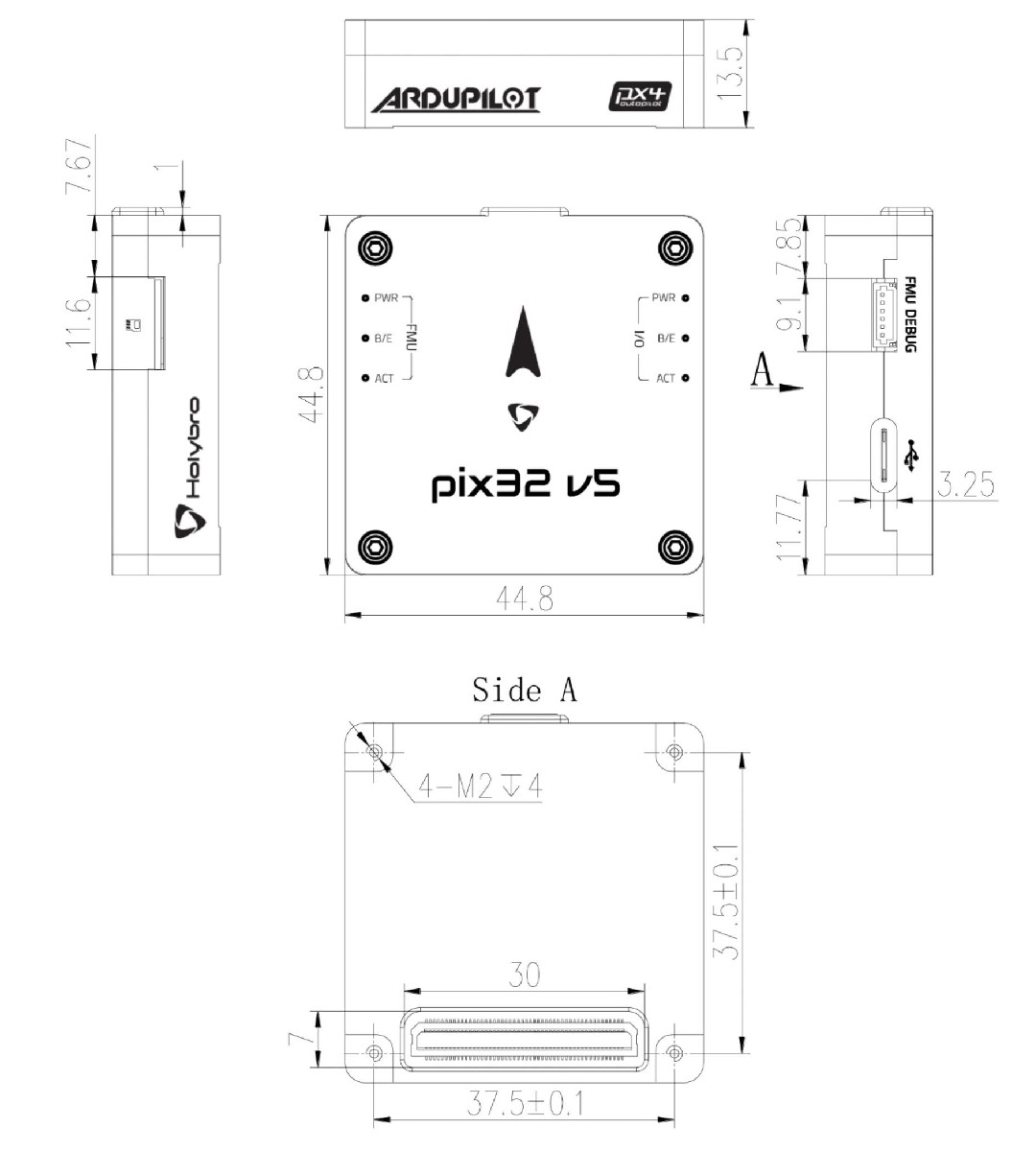
- Розміри: 45x45x13.5мм
- Вага: 33.0гр
- Дані про навколишнє середовище, якість & та надійність:
- Температура роботи: -40 ~ 85°c
- Температура зберігання: -40 / 85℃
- CE
- FCC
- Сумісний із RoHS (без свинцю)
Додаткову інформацію можна знайти в Технічному описі Pix32 V5.
Де придбати
Замовляйте на веб-сайті Holybro.
Збірка / налаштування
Швидкий старт з підключення Pix32 v5 надає інструкції щодо збирання необхідних/важливих периферійних пристроїв, таких як GPS, плата управління живленням тощо.
Макети базової плати
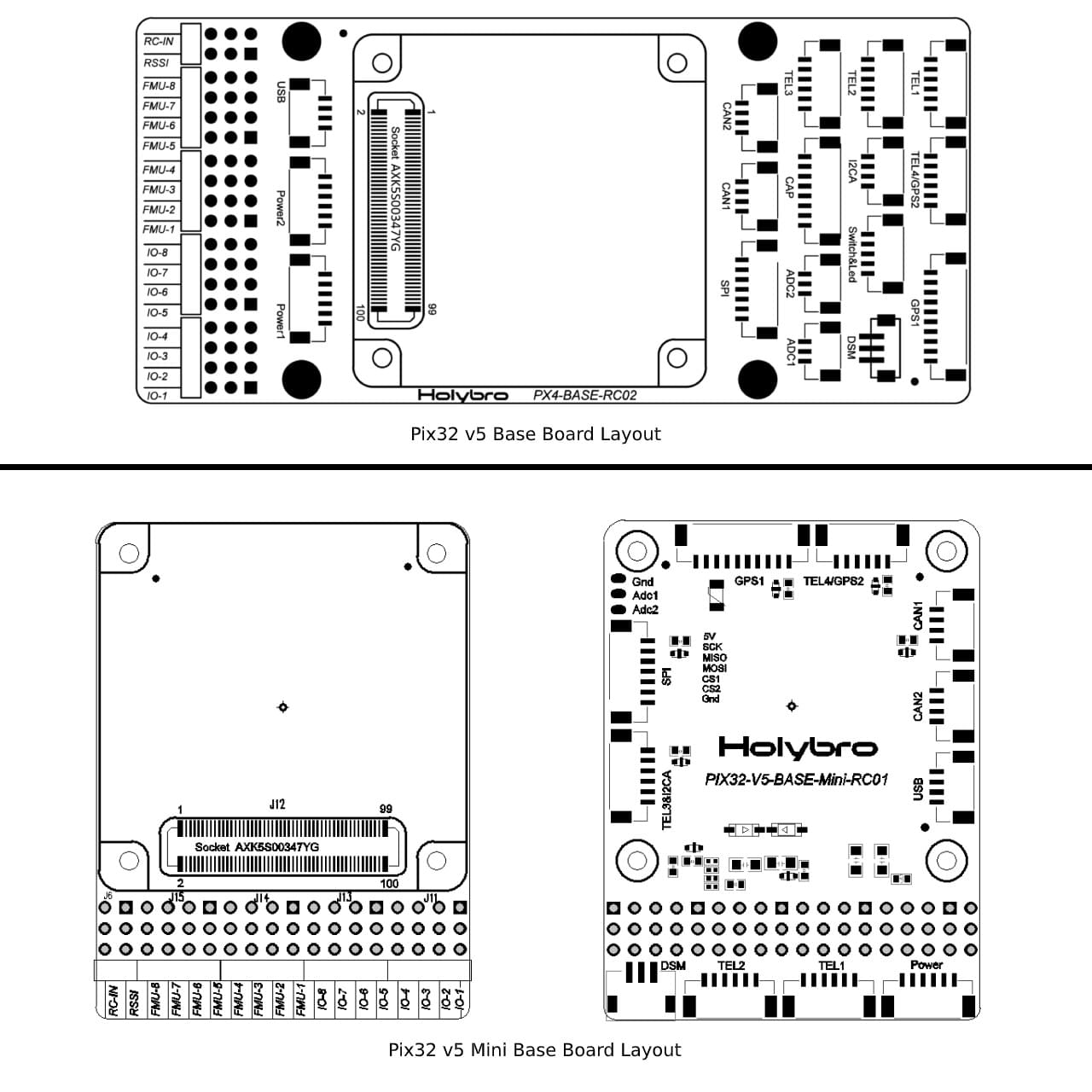
Схема розташування виводів
Розміри
Номінальна напруга
Pix32 v5 може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини живлення: POWER1, POWER2 і USB.
Вихідні шини живлення FMU PWM OUT та I/O PWM OUT (від 0В до 36В) не живлять плату контролера польоту (і не живляться від неї). Ви повинні подавати живлення на один з POWER1, POWER2 або USB, інакше плата буде знеструмлена.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 and POWER2 входи (від 4,9 В до 5,5 В)
- USB вхід (4.75В до 5.25В)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 і POWER2 входи (робочий діапазон від 4,1 В до 5,7 В, від 0 В до 10 В без пошкоджень)
- USB вхід (операційний діапазон 4.1В до 5.7В, 0В до 6В без пошкоджень)
- Серво-вхід: VDD_SERVO вивід FMU PWM OUT та I/O PWM OUT (від 0В до 42В без пошкоджень)
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана і автоматично встановлюється за допомогою QGroundControl при підключенні відповідного обладнання.
Щоб зібрати PX4 для цієї цілі:
зробіть holybro_durandal-v1_defaultВідладочний порт
Системна консоль серійного порту та SWD інтерфейс працюють на порту FMU Debug
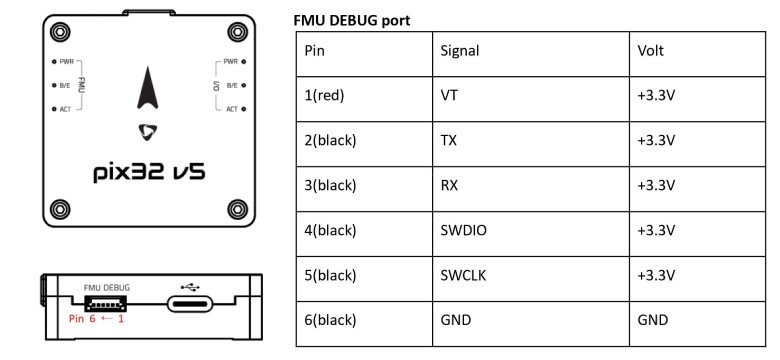
Роз’єм використовує стандартний Pixhawk Debug Mini інтерфейс, визначений у Pixhawk Connector Standard.
Периферія
Підтримувані платформи / планери
Будь-який мультикоптер / літак / наземна платформа чи човен, який може керуватися звичайними РК сервоприводами або сервоприводами Futaba S-Bus. Повний перелік підтримуваних конфігурацій можна переглянути в розділі Довідник планерів.