Місії з доставки вантажу
Місія з доставки посилки дозволяє планувати та виконувати доставку вантажу за допомогою захвату.
:::note Ця функція була додана в PX4 v1.14 з підтримкою захвату (лише). Місії з доставки посилок будуть розширені для підтримки іншого обладнання для випуску вантажу в майбутньому, включаючи лебідки. :::
Конфігурація механізму доставки
Місії з доставки посилок вимагають певної конфігурації, яку необхідно виконати перед плануванням і виконанням місії.
Конфігурація значною мірою залежить від апаратного забезпечення, тому вона описана на сторінці налаштування для кожного типу обладнання доставки посилок:
Планування місії
Місія доставки посилки планується майже так само, як і будь-яка інша місія з маршрутною точкою, із початковою точкою місії, точкою зльоту, різними маршрутними точками шляху та, можливо, точкою повернення. Єдина відмінність полягає в тому, що місія доставки посилки має включати пункт місії, який вказує, чи потрібно випустити посилку на землі (Land) чи в повітрі (Waypoint), після чого інший елемент місії для розвантаження посилки (Механізм захоплення).
Те, чи ви приземляєтеся, залежить від того чи можна безпечно вивантажити посилку під час польоту та чи здатний апарат приземлитися в місці вивантаження. Оскільки захват не може безпечно опускати посилки, мультикоптери та апарати VTOL часто приземляються, щоб розвантажити посилки, коли використовують захват.
Після того, як пристрій для розвантаження вказує про завершення, апарат попрямує до наступної маршрутної точки. Зауважте, що в разі приземлення наступним елементом місії після розвантаження має бути інший елемент місії Waypoint або Takeoff (це не має бути RETURN >.)
Створення місії доставки посилок
Щоб створити місію доставки посилок (з використанням захвату):
Створіть звичайну місію з елементом місії
Takeoffі додатковими маршрутними точками для потрібного маршруту польоту.Додайте маршрутну точку на карті, де ви хочете випустити посилку.
Щоб скинути посилку під час польоту, установіть відповідну висоту для маршрутної точки (і переконайтеся, що маршрутна точка знаходиться в безпечному місці для скидання посилки).
Якщо ви хочете посадити апарат, щоб здійснити доставку, вам потрібно буде змінити
Waypointна елемент місіїLand. Зробіть це, вибравши заголовок пункту місії, а потім вибравшиLandу спливаючому діалоговому вікні.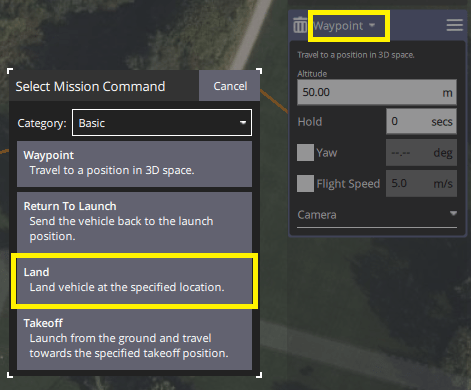
Додайте маршрутну точку на карті (у будь-якому місці) для вивільнення захвату. Щоб змінити це на
Механізм захоплення, виберіть заголовок "Waypoint" і у спливаючому вікні змініть групу на "Advanced", а потім виберітьGripper Mechanism.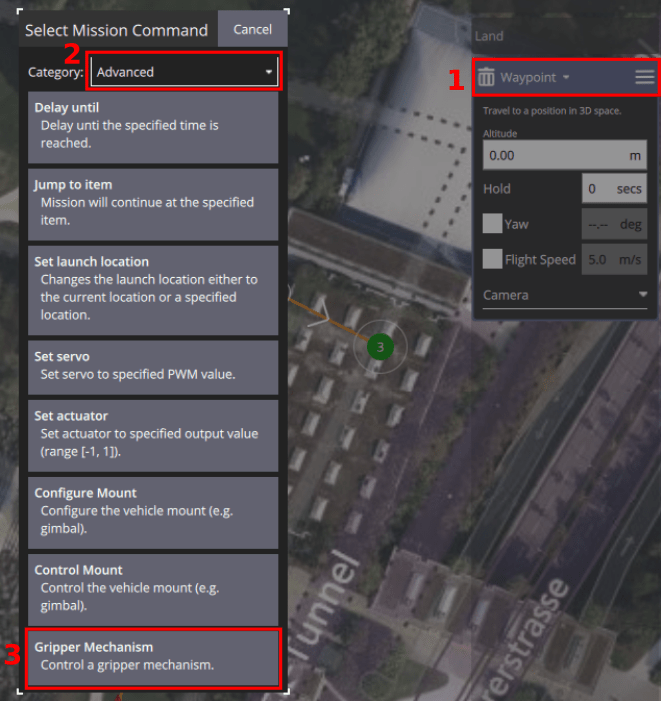
Налаштуйте дію для захоплювача в редакторі.
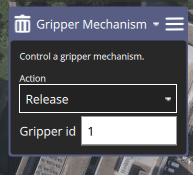
- Щоб вивільнити посилку, встановіть значення "Release".
- ID захоплювача наразі встановлювати не потрібно.
Додайте додаткові шляхові точки для решти шляху. Якщо ви приземлилися, пам’ятайте, що ви повинні включити маршрутну точку після
Gripper Mechanismперед додаванням елемента місіїReturn.
Приклади планів
Місія скидання посилки
Тут показано план місії, де апарат скидає пакет під час польоту. Початковий елемент місії – це маршрутна точка, а дія – Gripper Release (показано в переліку елементів місії)
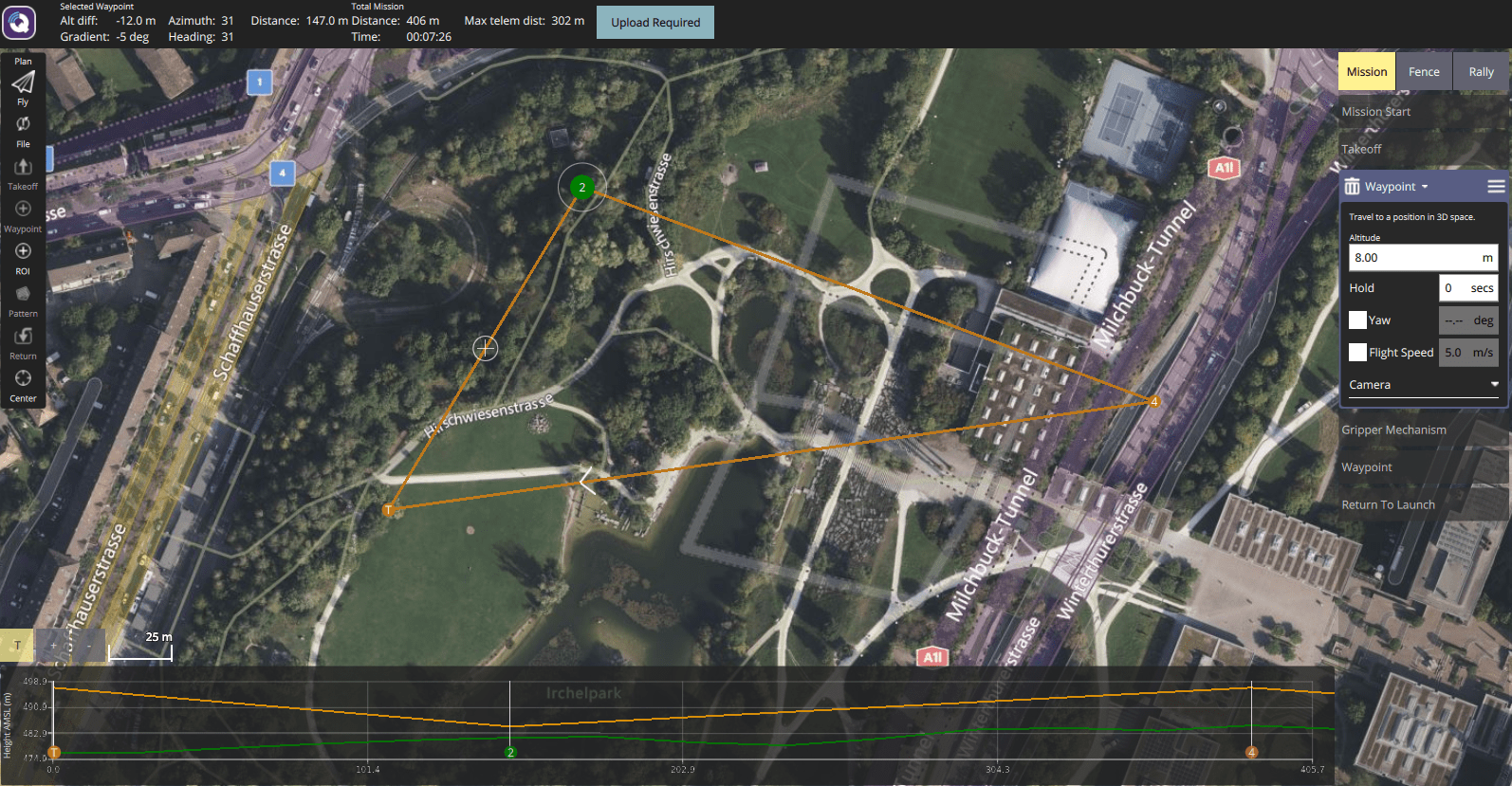
Зверніть увагу, як графік висоти показує pre-waypoint як маршрутну точку в повітрі, також на правій панелі.
Місія приземлення та розвантаження
Тут показано план місії, де апарат приземляється, щоб доставити посилку.
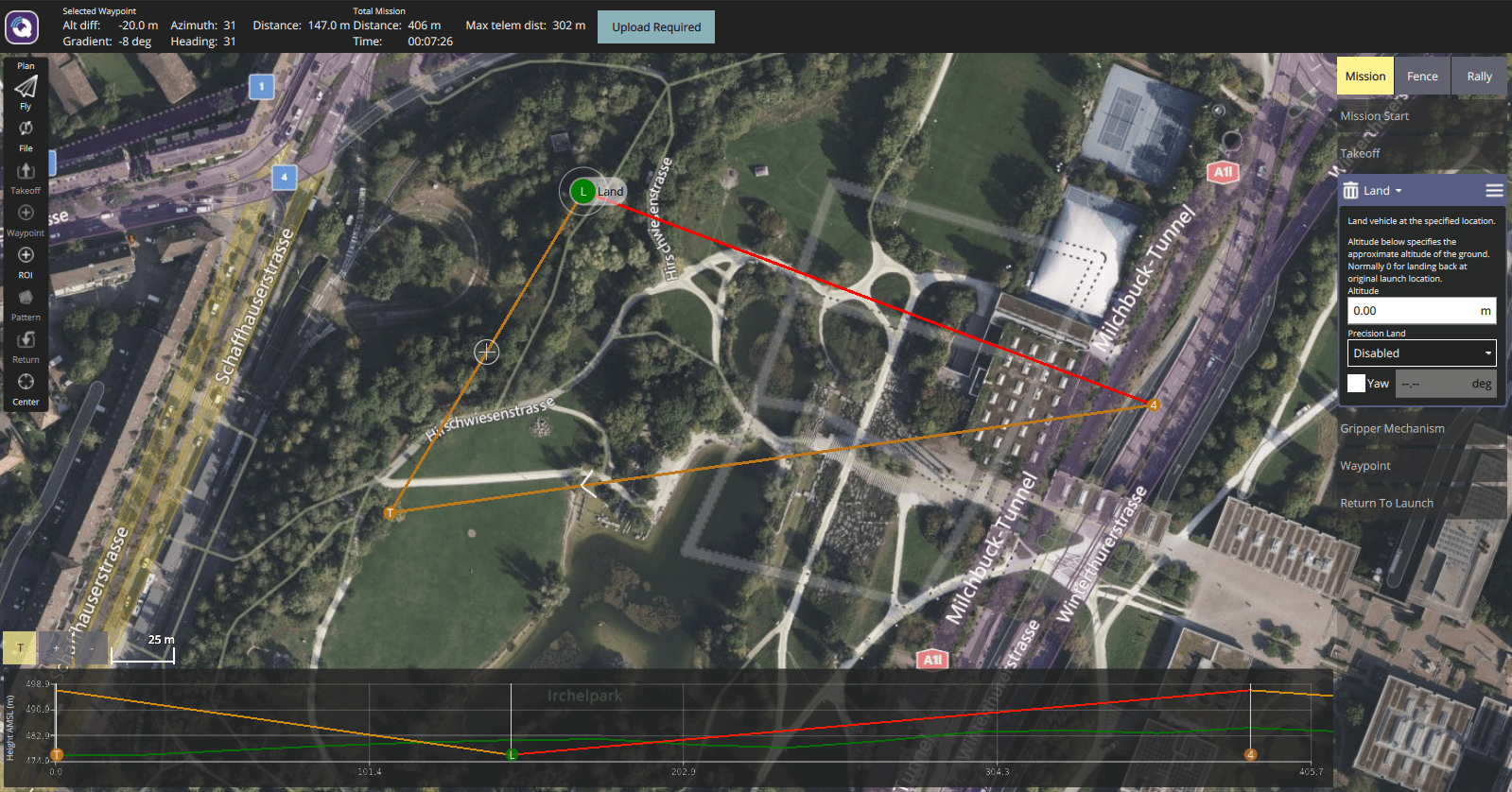
Зверніть увагу, як на графіку висоти показано елемент Land.
Примітки
Точка маршруту RTL для доставки посилок з посадкою
Не плануйте місію з доставкою таким чином: LAND > GRIPPER > RETURN TO LAUNCH.
З міркувань безпеки функція "Return To Launch" вимикається, коли апарат приземлений (пов'язана проблема). Отже, якщо ви приземлитесь, випустите вантаж, а потім встановите точку маршруту RTL, апарат буде простоювати на координатах посадки.
Ручне керування захватом в місіях
Захват може бути керований вручну за допомогою кнопки джойстика (якщо налаштовано) в будь-якому режимі, включаючи під час місії.
Проте зауважте, що якщо ви вручну командуєте закриття захвату, тоді як місія з доставки відкриває захват, захват не зможе завершити дію відкриття. Місія відновиться після тайм-ауту елемента місії доставки вантажу (MIS_PD_TO закінчується, навіть якщо вантаж не був випущений.
Автоматичне вимкнення відключено в місіях
Під час місії автоматичне вимкнення відключено за замовчуванням. Це означає, що під час посадки для доставки посилок апарат усе ще буде увімкнений (і потенційно небезпечний!)
Зворотний зв'язок щодо випуску посилки
Місія продовжиться після завершення елемента місії "package release" (наприклад, GRIPPER).
Захвати та інші пристрої доставки або використовують зворотний зв’язок датчика, або настроюваний тайм-аут, щоб вказати про завершення.