Швидке підключення Durandal Wiring
PX4 v1.11PX4 не виробляє цей (чи будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
У цьому короткому посібнику показано, як увімкнути живлення польотного контролера Holybro Durandal® та підʼєднати до нього найважливіші периферійні пристрої.

Розпаковка
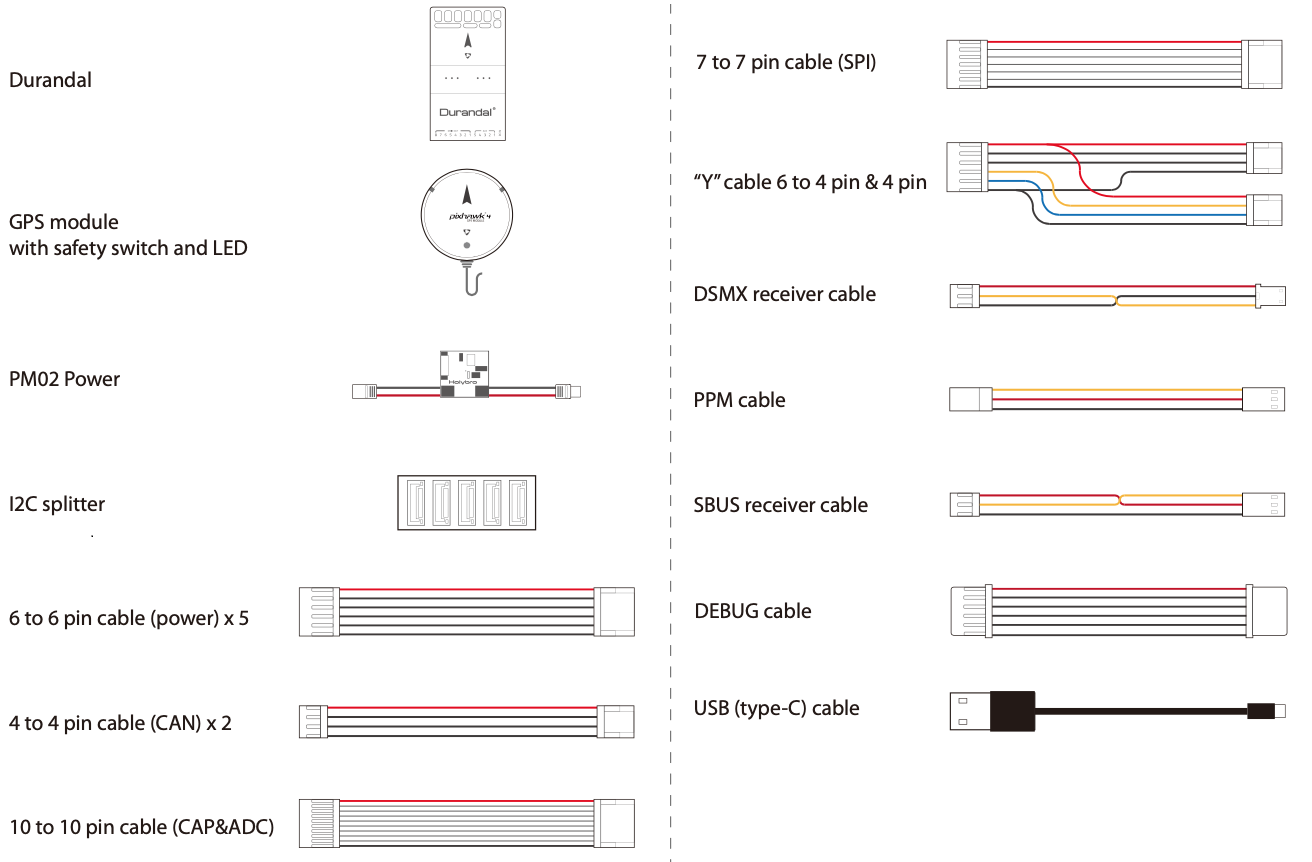
Durandal продається в комплекті з різноманітними комбінаціями аксесуарів, включаючи модулі живлення: PM02 V3 та PM07, та GPS/Компас Pixhawk 4 (u-blox NEO-M8N).
Вміст коробки з модулем живлення PM02 V3 показано нижче (у коробці також є посібник з роз'ємами та інструкція з модулю живлення).
Огляд схеми підключення
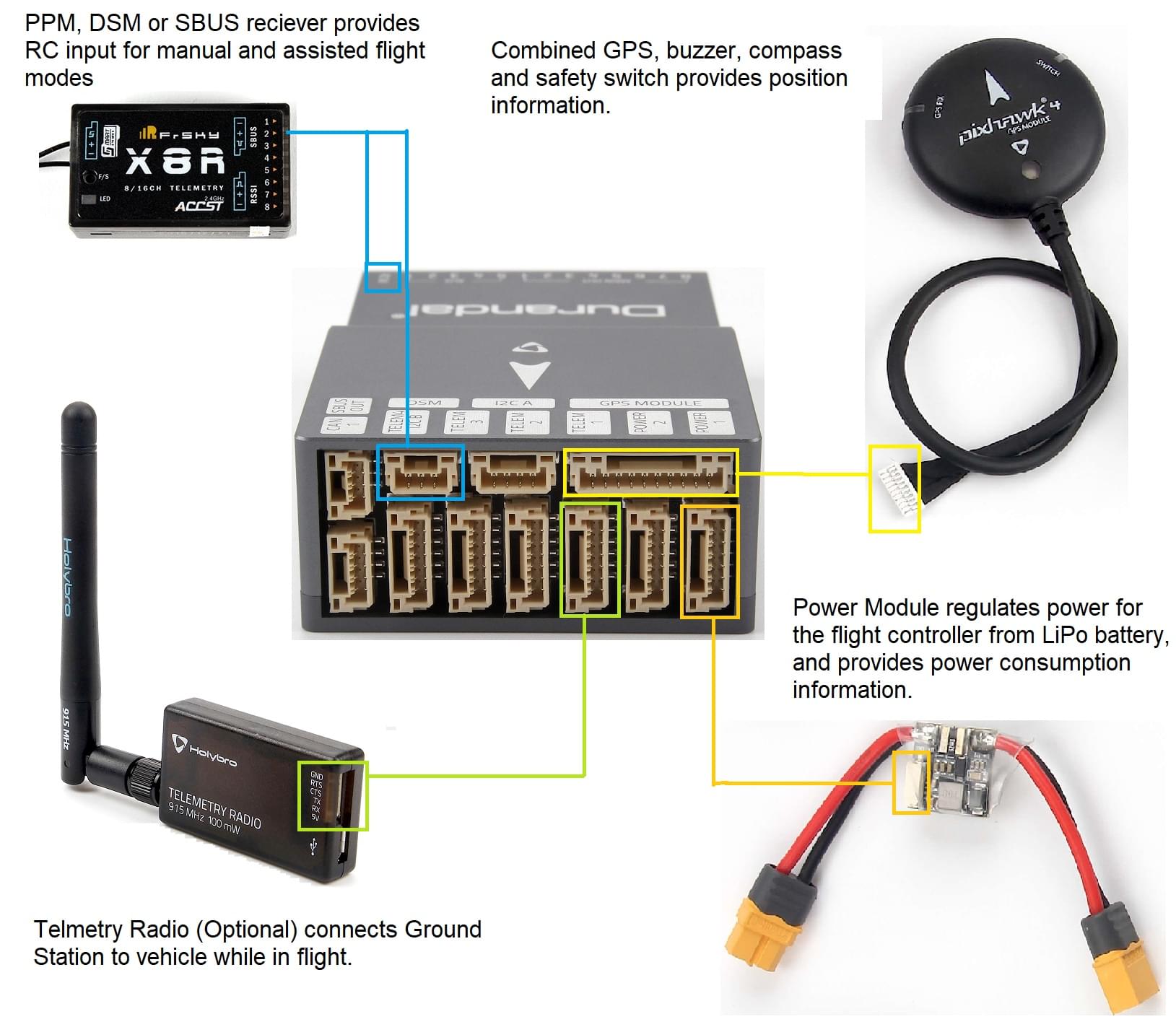
На зображенні нижче показано, як під'єднати найважливіші датчики та периферійні пристрої (за винятком виходів мотора та сервоприводів). Ми розглянемо кожен з них детально в наступних розділах.
TIP
Додаткову інформацію про доступні порти можна знайти тут: Durandal > Pinouts.
Монтаж та орієнтація контролера
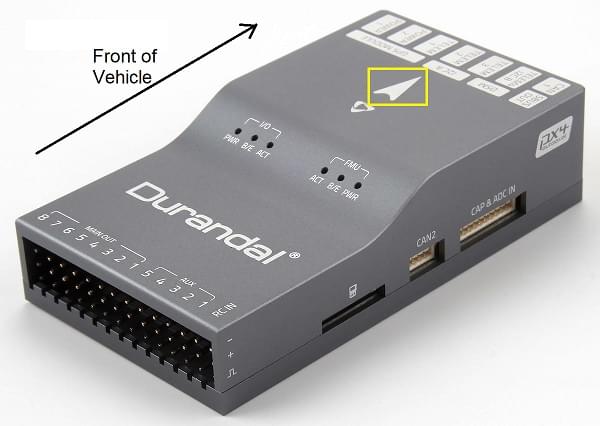
Дюрандал повинен бути встановлений на раму, розташований якомога ближче до центру ваги вашого апарату, орієнтований верхньою стороною вгору зі стрілкою, що вказує вперед апарату.
Якщо контролер не може бути змонтований у рекомендованому/стандартному положенні (наприклад, через обмеження місця), вам потрібно буде налаштувати програмне забезпечення автопілота з орієнтацією, яку ви фактично використовували: Орієнтація контролера польоту.
TIP
Плата має внутрішню вібраційну ізоляцію. Не використовуйте віброізоляційну пінку для монтажу контролера (подвійна стрічка на клейовій основі зазвичай достатня).
GPS + Compass + Buzzer + Safety Switch + LED
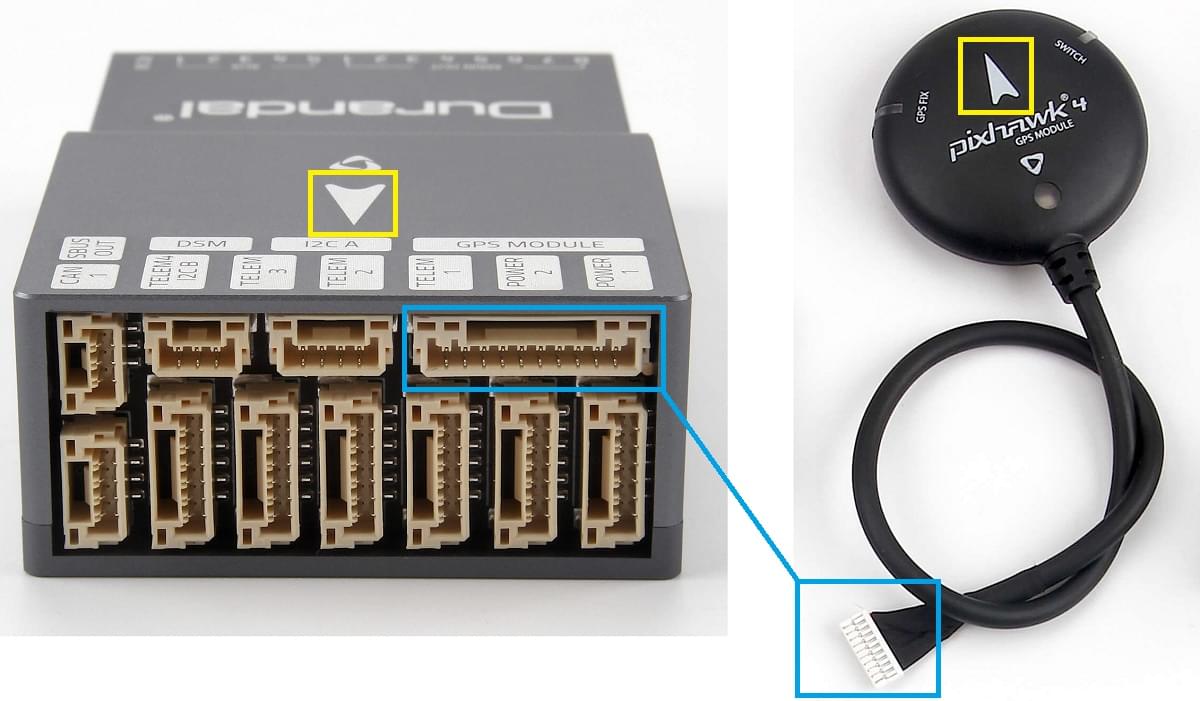
Durandal розроблений для успішної роботи з модулем GPS Pixhawk 4, який має вбудований компас, безпечний вимикач, сигналізацію, світлодіоди. Він підключається безпосередньо до порту GPS за допомогою 10-жильного кабелю.
GPS/компас слід монтувати на раму якомога подалі від інших електронних пристроїв, з напрямком вперед транспортного засобу (відокремлення компаса від інших електронних пристроїв зменшить втручання).
Вбудований безпечний вимикач в GPS-модулі увімкнений за замовчуванням (коли включений, PX4 не дозволить вам готувати до польоту). Щоб вимкнути безпеку, натисніть і утримуйте безпечний вимикач протягом 1 секунди. Ви можете натиснути безпечний вимикач знову, щоб увімкнути безпеку та відключити транспортний засіб (це може бути корисно, якщо, з якихось причин, ви не можете вимкнути транспортний засіб за допомогою вашого пульта дистанційного керування або наземної станції).
Потужність
Ви можете використовувати модуль живлення або розподільник живлення для живлення двигунів/сервоприводів та виміру споживаної потужності. Рекомендовані модулі живлення показані нижче.
PM02D Power Module
Модуль живлення (PM02 v3) може бути поставлений разом з Durandal. Він надає регульоване живлення контролеру польоту та надсилає напругу/силу струму акумулятора контролеру польоту.
Підключіть вихід Модуля живлення, як показано.
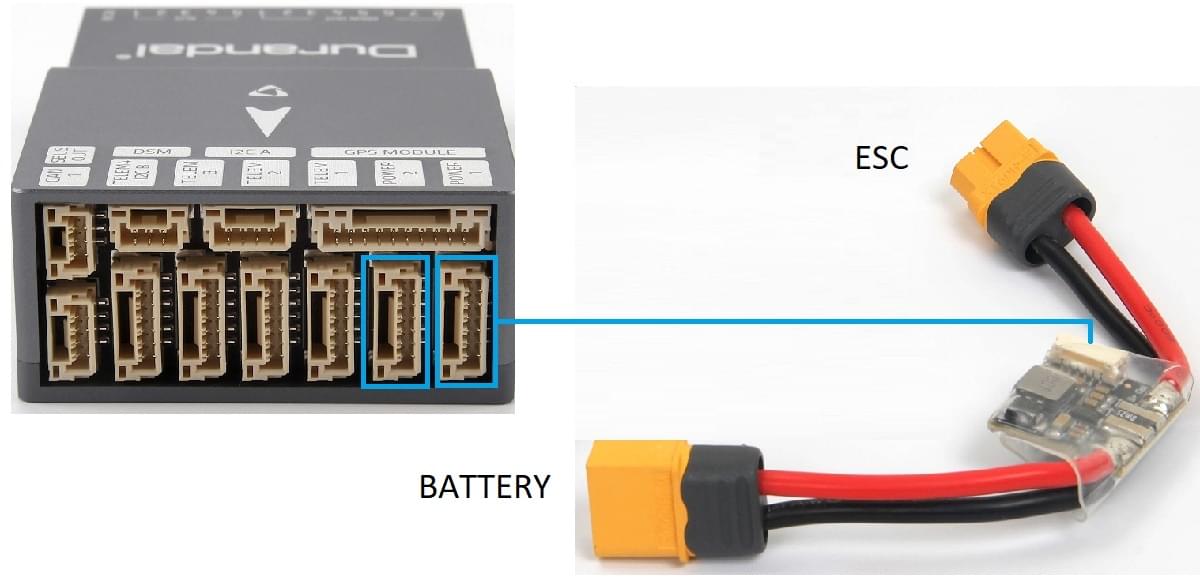
- Порт напруги/струму PM: підключіться до POWER1 порту (або
POWER2) за допомогою 6-жильного кабелю GH, що входить у комплект. - Вхід PM (роз'єм XT60): підключіть до ліпо-акумулятора (2~12S).
- Вихід живлення PM (роз'єм XT60): підведіть до будь-якого контролера регулятора обертів мотора.
TIP
Оскільки цей модуль живлення не містить проводки розподілу живлення, ви зазвичай просто підключаєте всі контролери регуляторів обертів мотора паралельно до виходу модуля живлення (контролер регулятора обертів мотора повинен бути відповідним для постачаного рівня напруги).
TIP
Контактна шина живлення (+) 8-контактного рейлу MAIN/AUX не живиться блоком живлення модуля живлення контролера польоту. Якщо вона повинна бути окремо живленою для керування сервоприводами для рульових поверхонь, елеронами тощо, лінію живлення потрібно підключити до ESC зі вбудованим BEC або окремого BEC напругою 5V або акумулятора LiPo 2S. Переконайтеся, що напруга сервопривода, який ви збираєтеся використовувати, є відповідною.
Модуль живлення має наступні характеристики/обмеження:
- Максимальна вхідна напруга: 60V
- Максимальне вимірювання струму: 120A Voltage
- Вимірювання струму, налаштоване для SV АЦП Перемикання виходів регулятора 5,2 В і 3А макс
- Вага: 20г
- Пакет включає:
- Плата PM02
- 6-контактний кабель MLX (1)
- 6pin GH cable (1)
Модуль живлення Pixhawk 4 (PM07)
Модуль живлення Pixhawk 4 (PM07) може бути поставлений/використаний разом з Durandal. Це виступає як модуль живлення та розподільник живлення, який забезпечує регульоване живлення контролеру польоту та регуляторам швидкості, а також надсилає напругу/сили до контролера польоту.
Це підключено так само, як описано в документації Швидкий старт Pixhawk 4 > Живлення.
Має наступні характеристики/обмеження:
- Поточний PCB: загальна потужність виходів 120A (MAX)
- UBEC вихідний струм 5В: 3А
- Напруга входу UBEC: 7~51v (2~12s LiPo)
- Розміри: 68508 мм
- Отвір для монтажу: 45*45мм
- Вага: 36g
- Пакет включає:
- Плата PM07 (1)
- 80мм коннекторія XT60 (1)
Див. також Керівництво зі швидкого запуску PM07 (Holybro).
Конфігурація батареї
Налаштування батареї/живлення потрібно налаштувати в Налаштування оцінки батареї. Для будь-якого модуля живлення вам потрібно буде налаштувати кількість комірок.
Вам не потрібно буде оновлювати дільник напруги, якщо ви використовуєте який-небудь інший модуль живлення (наприклад, той, що від Pixracer).
Радіоуправління
Для того щоб керувати транспортним засобом вручну, потрібна система радіоуправління (RC) (PX4 не потребує системи радіоуправління для автономних режимів польоту).
Вам потрібно вибрати сумісний передавач/приймач і зв'язати їх таким чином, щоб вони взаємодіяли (ознайомтеся з інструкціями, що додаються до вашого конкретного передавача/приймача).
Нижче наведено інструкції, як підключити різні типи приймачів до Durandal:
Приймачі Spektrum/DSM підключаються до входу DSM RC.

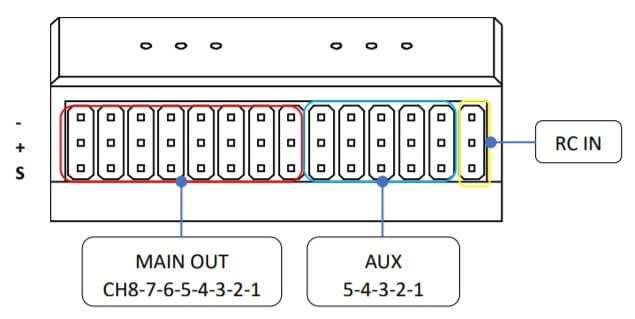
Приймачі PPM і S.Bus підключаються до входу SBUS_IN/PPM_IN (позначений як RC IN, поруч з головними/допоміжними входами).
Приймачі PPM та PWM, які мають окремий провід для кожного каналу, повинні підключатися до порту PPM RC через PPM кодер як цей (приймачі PPM-Sum використовують один сигнальний провід для всіх каналів).
Для отримання додаткової інформації про вибір радіосистеми, сумісність приймача та зв'язок вашої передавача/приймача, див. статтю: Пульт керування передавачів & приймачів.
Телеметричні радіостанції (Опціонально)
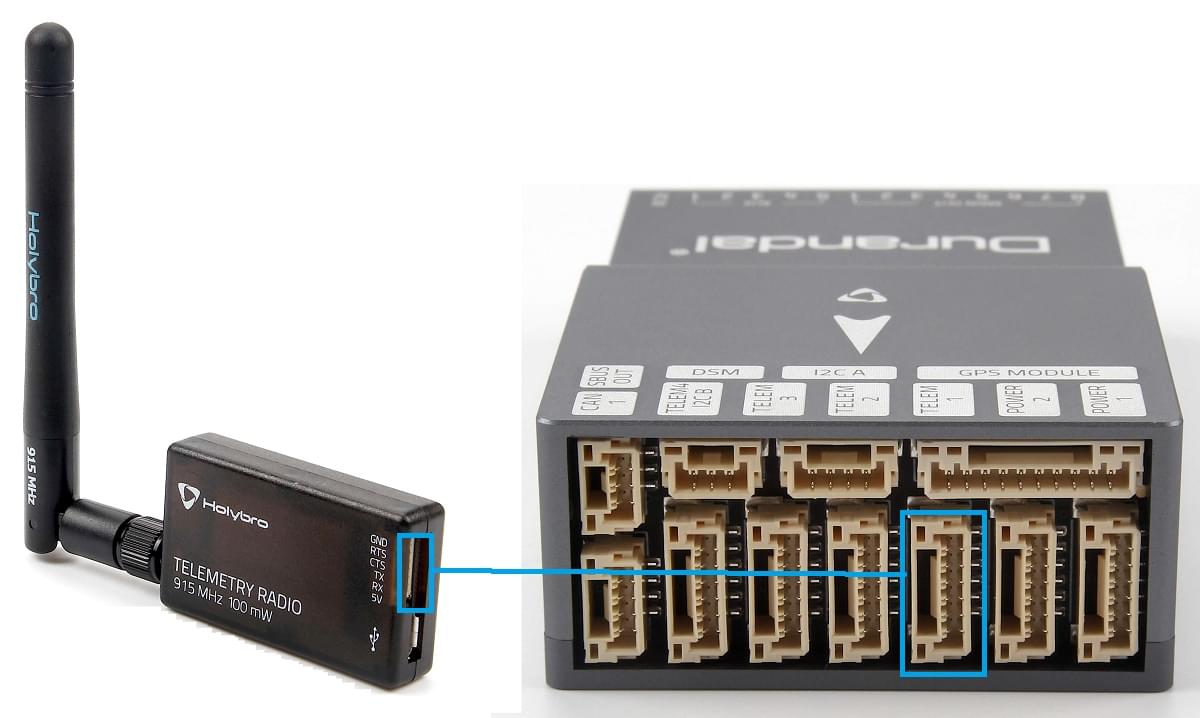
Телеметрійні радіомодулі можуть використовуватися для зв'язку та управління транспортним засобом в польоті з наземної станції (наприклад, ви можете направляти БПЛА в певне положення або завантажувати нове завдання).
Радіостанцію, розташовану на транспортному засобі, слід підключити до порту TELEM1 так, як показано нижче за допомогою одного з 6-позиційних роз'ємів (якщо підключено до цього порту, додаткова конфігурація не потрібна). Інша радіостанція підключається до вашого комп'ютера або мобільного пристрою наземної станції (зазвичай за допомогою USB).
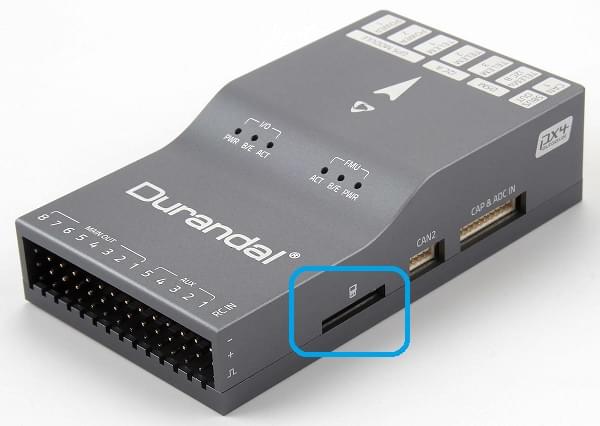
SD-карта (Опціонально)
Картки SD настійно рекомендується, оскільки вони потрібні для запису та аналізу даних польоту, для виконання місій та для використання апаратного засобу UAVCAN-bus. Вставте SD-карту в Durandal туди, де показано нижче.
TIP
Для додаткової інформації дивіться Основні поради > SD-карти (можливістю Видалення пам'яті).
Двигуни
Сигнали керування двигунами/сервоприводами підключаються до портів I/O PWM OUT (MAIN OUT) та FMU PWM OUT (AUX) у порядку, вказаному для вашого апарату в Airframe Reference.
Двигуни повинні мати окреме живлення.
INFO
Якщо ваша конструкція не зазначена у довіднику конструкцій, скористайтеся "загальною" конструкцією потрібного типу.
TIP
Durandal має 5 допоміжних портів, тому не може бути використаний з повітряними рамами, які відображають AUX6, AUX7, AUX8 на двигуни або інші критичні керування польотом.
Інші периферійні пристрої
Підключення та конфігурація додаткових / менш поширених компонентів описано в темах для окремих периферійних пристроїв.
Розпіновка
Конфігурація PX4
Спочатку вам потрібно встановити Прошивку PX4 "Master" на контролер, використовуючи QGroundControl.
Підтримка Durandal буде в релізі PX4, який слідує за PX4 v1.10, який є стабільним.
Додаткову загальну інформацію щодо конфігурації описано в: Конфігурація автопілота.
Конкретні конфігурації QuadPlane тут: QuadPlane VTOL налаштування
Подальша інформація
- Огляд Durandal
- Технічний опис Durandal (Holybro)
- Durandal розпіновка (Holybro)
- Durandal_MB_H743sch.pdf (Схеми Durandal)
- STM32H743IIK_pinout.pdf (Схема виводів Durandal)