Holybro Kakute F7 (Знято з виробництва)
DiscontinuedPX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Kakute F7 від Holybro - це плата керування польотом, призначена для гонщиків.

Цей контролер польоту підтримується виробником.
Ключові особливості
- Головний системний чіп: STM32F745VGT6
- ЦП: 216 МГц ARM Cortex M7 з одноточністю FPU
- RAM: 320 KB SRAM
- FLASH: 1 МБ
- Стандартна форма гонщика: 36x36 мм зі стандартним отвором 30,5 мм
- ICM20689 Accel / Gyro (М'які кріплення)
- BMP280 Baro
- microSD (логування)
- 6 UARTs
- 1 шина I2C
- 6 PWM виводів
- Вбудований чіп OSD (AB7456 через SPI)
Де придбати
Дошку можна придбати в одному з наступних магазинів (наприклад):
TIP
Kakute F7 призначений для сумісної роботи з 4-в-1 ESC Tekko32 і може бути придбаний в комплекті.
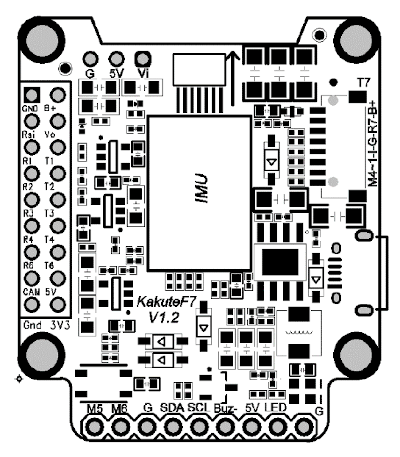
Конектори та контакти
Це сілкскрін для Kakute F7, що показує верхню частину плати:
| Піни | Функція | PX4 default |
|---|---|---|
| B+ | Позитивна напруга батареї (2S-6S) | |
| 5В | Вихід 5В (максимум 2A) | |
| VO | Відеовихід на відеопередавач | |
| VI | Відеовхід з камери FPV | |
| G або GND | Заземлення | |
| SDA, SCL | Підключення I2C (для периферійних пристроїв) | |
| R1, T1 | UART1 RX та TX | TELEM1 |
| R2, T2 | UART2 RX та TX | TELEM2 |
| R3, T3 | UART2 RX та TX | Консоль відлагодження NuttX |
| R4, T4 | UART4 RX та TX | GPS1 |
| R6, T6 | UART6 RX та TX | RC порт |
| R7, T7 | UART7 RX та TX (RX знаходиться у роз'ємі для використання з 4-в-1 ESC) | Телеметрія DShot |
| LED | Дріт сигнальний для адресованих світлодіодів WS2182 (не тестувався) | |
| Buz- | Негативна нога п'єзожучка (Підключіть позитивну ногу динаміку до контакту 5В) | |
| 3V3 | 3.3V вивід (200 мA max) | |
| M1 до M4 | Вихід сигналу двигуна (розташований у роз'ємі для використання в 4-в-1 ESC) | |
| М5, М6 | Додаткові виходи сигналу двигуна (розташовані на боці плати) | |
| RSI | Аналоговий вхід RSSI (0-3,3 В) від приймача | |
| Завантаження | Кнопка завантажувача |
Оновлення завантажувача PX4
Дошка поставляється із заздалегідь встановленою Betaflight. Перед встановленням прошивки PX4 необхідно прошити завантажувач PX4. Завантажте завантажувальний бінарний файл kakutef7_bl.hex та прочитайте цю сторінку для інструкцій з прошивки.
Збірка прошивки
Щоб зібрати PX4 для цієї цілі:
make holybro_kakutef7_defaultВстановлення прошивки PX4
Прошивку можна встановити будь-якими звичайними способами:
- Збудуйте та завантажте джерело
make holybro_kakutef7_default upload - Завантажте прошивку за допомогою QGroundControl. Ви можете використовувати або готове вбудоване програмне забезпечення, або власне користувацьке програмне забезпечення.
Конфігурація
Якщо ви використовуєте 4-в-1 ESC з призначенням мотора Betaflight/Cleanflight, ви можете використовувати користувацький інтерфейс Actuator, щоб належним чином встановити управління мотором.
Крім основної конфігурації, важливі наступні параметри:
| Параметр | Налаштування |
|---|---|
| SYS_HAS_MAG | Це має бути вимкнено, оскільки у платі немає внутрішнього магніту. Ви можете активувати це, якщо приєднаєте зовнішній магніт. |
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART2 | /dev/ttyS1 | TELEM2 |
| USART3 | /dev/ttyS2 | Консоль відладки |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | Телеметрія ESC (DShot) |
Відладочний порт
Системна консоль
UART3 RX та TX налаштовані для використання як Системна Консоль.
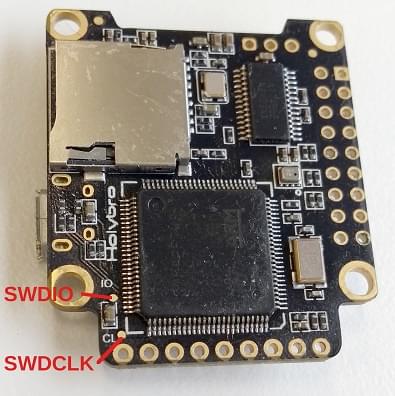
SWD
Інтерфейс SWD (JTAG) має такі контакти:
SWCLK: Тестова точка 2 (Pin 72 на процесорі)SWDIO: Тестова точка 3 (Pin 76 на процесорі)GND: Як позначено на платіVDD_3V3: Як позначено на платі
Ці показані нижче.