CUAV Pixhawk V6X
WARNING
PX4 не виробляє цей (або будь-який інший) автопілот. Зверніться до виробника щодо питань технічної підтримки або відповідності вимогам.
Pixhawk V6X® - останнє оновлення успішного сімейства польотних контролерів Pixhawk®, розроблене та виготовлене у співпраці з CUAV® та командою PX4.
Це базується на стандарті Pixhawk® Autopilot FMUv6X, Стандарті шин автопілота та Стандарті коннектора Pixhawk®.

TIP
Цей автопілот підтримується командами підтримки та тестування PX4.
Pixhawk® V6X принесе вам найвищий рівень продуктивності, стабільності та надійності у всіх аспектах.
- Процесор Arm® Cortex®-M7 (STM32H753) з операційною точкою (FPU), високошвидкісні операції на частоті 480 МГц та 2 МБ флеш-пам'яті. Розробники можуть бути більш продуктивними та ефективними, що дозволяє використовувати складніші алгоритми та моделі.
- Високопродуктивний бортовий, низькозвуковий ІНС та автомобільний магнітний компас на основі відкритого стандарту FMUv6X. Мета полягає в досягненні кращої стабільності та антиінтерференційної здатності.
- Тройний резервний IMU & подвійний резервний барометр на окремих шинах. Коли автопілот PX4 виявляє відмову датчика, система безперервно переключається на інший, щоб забезпечити надійність керування польотом.
- Кожен незалежний LDO живить кожен набір сенсорів з незалежним керуванням живленням. Система ізоляції вібрації для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних вимірювань, що дозволяє транспортним засобам досягти кращих загальних польотних характеристик.
- Зовнішня шина датчика (SPI5) має дві лінії вибору мікросхем та сигнали готовності даних для додаткових датчиків та навантаження з інтерфейсом SPI.
- Інтегрований мікросхемний Ethernet PHY для високошвидкісного зв'язку по Ethernet з пристроями на борту, такими як комп'ютери місій.
- Нова система ізоляції вібрацій, призначена для фільтрації високочастотних вібрацій та зменшення шуму для забезпечення точних вимірювань.
- IMUs контролюються за допомогою нагрівальних резисторів на борту, що дозволяє досягти оптимальної робочої температури IMUs
- Модульний керуючий пристрій: розділені IMU, FMU та базова система, з'єднані за допомогою роз'ємів Pixhawk® Autopilot Bus на 100 контактів та 50 контактів.
Pixhawk® V6X ідеально підходить для корпоративних дослідницьких лабораторій, академічних досліджень та комерційних застосувань.
Процесори & датчики
- Процесор FMU: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 20KB SRAM
- Сенсори на платі
- Акселератор/гіроскоп: BMI088
- Акселератор/гіроскоп: ICM-42688-P
- Акселератор/гіроскоп: ICM-20649
- Mag: RM3100
- Барометр: 2x ICP-20100
Електротехнічні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 5,7 В
- Вхід USB Power: 4.75~5.25В
- Вхід на серворейку: 0~9.9В
- Номінальний струм:
- Комбінований обмежувач вихідного струму TELEM1 і GPS2: 1,5 А
- Комбінований обмежувач вихідного струму всіх інших портів: 1.5A
Інтерфейси
- 16 PWM виводів сервоприводів
- 1 Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- 3 TELEM-порти (з повним контролем потоку)
- 1 UART4(Seial та I2C)
- 2 порти GPS
- 1 повноцінний порт GPS плюс порт перемикача безпеки (GPS1)
- 1 базовий GPS-порт (з I2C, GPS2)
- 2 USB порти
- 1 TYPE-C
- JST GH1.25
- 1 порт Ethernet
- Transformerless Applications
- 100Mbps
- 1 шина SPI
- 2 лінії вибору чіпу
- 2 лінії даних
- 1 SPI SYNC лінія
- 1 лінія SPI reset
- 2 CAN шини для CAN периферії
- CAN шина має individual silent controls або ESC RX-MUX control
- 4 порти вводу живлення
- 2 входи живлення Dronecan/UAVCAN
- 2 входи живлення SMBUS/I2C
- 1 порт вводу-виводу AD & IO
- 2 додаткових аналогових входи (3,3 і 6,6 В)
- 1 PWM/Capture вхід
- 2 виділених для відлагодження
- FMU Debug
- IO debug
Механічні дані
Вага
- Модуль політного контролера: 99г
- Основний модуль: 43г
- Baseboard: 56г
Температура роботи та зберігання: -20 ~ 85°c
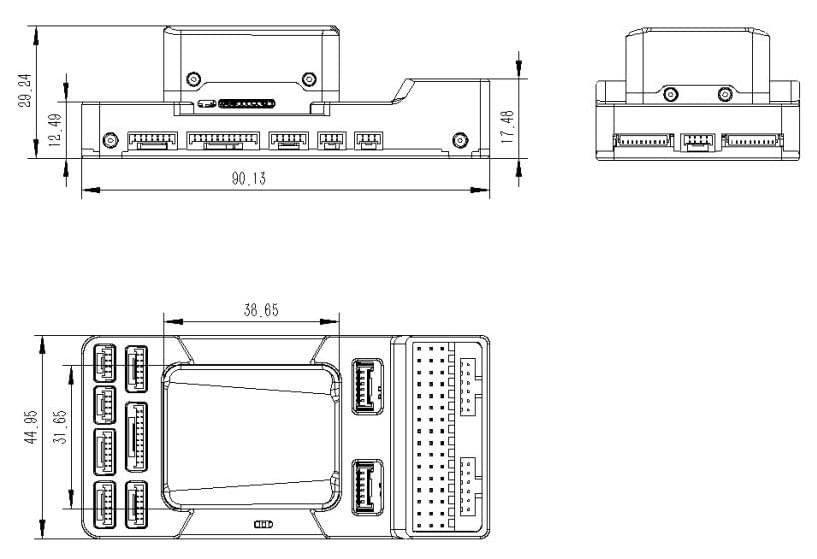
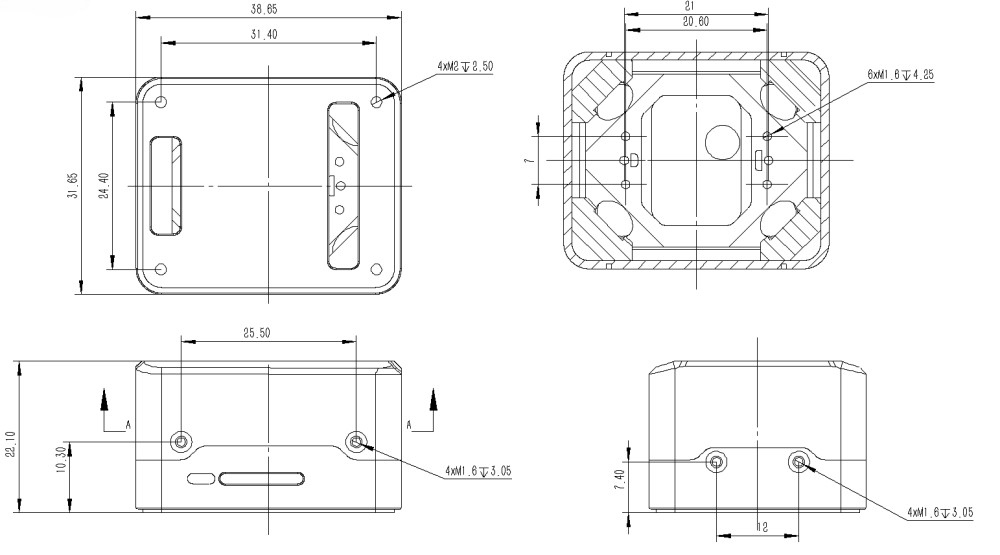
Розмір
Політний контролер
Основний модуль
Де купити
Замовлення від CUAV.
Зборка/інсталяція
Швидкий старт з підключення Pixhawk V6X надає інструкції щодо збирання необхідних/важливих периферійних пристроїв, включаючи GPS, модуль живлення тощо.
Схема розташування виводів
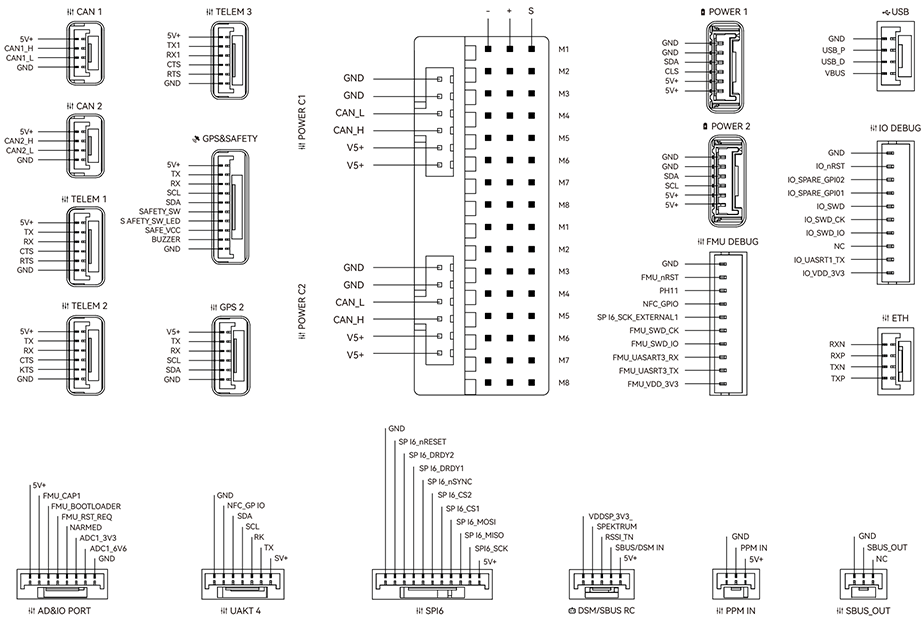
Примітки:
- Контакт камери (
PI0) є контактом 2 порту AD&IO, позначеним вище якFMU_CAP1.
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM3 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | UART4 |
| UART5 | /dev/ttyS4 | TELEM2 |
| USART6 | /dev/ttyS5 | PX4IO/RC |
| UART7 | /dev/ttyS6 | TELEM1 |
| UART8 | /dev/ttyS7 | GPS2 |
Номінальна напруга
Pixhawk V6X може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини живлення: POWERC1/POWER1, POWERC2/POWER2 і USB.
- POWER C1 і POWER C2 - це інтерфейси акумуляторів DroneCAN/UAVCAN (рекомендовано); POWER1 і POWER2 - це інтерфейси акумуляторів SMbus/I2C (резервний варіант).
- POWER C1 і POWER1 використовують один і той самий вимикач живлення, POWER C2 і POWER2 використовують один і той самий вимикач живлення.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER C1, POWER C2, POWER1 і POWER2 входи (4.75V в 5.7V)
- Вхід USB (4.75V до 5.25V)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- Входи POWER1 і POWER2 (робочий діапазон від 4,7 В до 5,7 В, від 0 В до 10 В без пошкоджень)
- USB-вхід (робочий діапазон від 4,7 В до 5,7 В, від 0 В до 6 В без пошкоджень)
- ** Серво-вхід:**
VDD_SERVOвивід FMU PWM OUT та I/O PWM OUT (від 0В до 42В без пошкоджень)
Моніторинг напруги
Моніторинг акумулятора цифрових DroneCAN/UAVCAN увімкнено за замовчуванням (див. Швидкий старт > Живлення).
INFO
Аналоговий моніторинг батареї через ADC не підтримується на цій конкретній платі, але може підтримуватися в варіантах цього контролера польоту з іншою базовою платою.
Створення прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється QGroundControl при підключенні відповідного апаратного забезпечення.
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v6x_defaultВідладочний порт
Системна консоль PX4 та SWD interface працюють на порту FMU Debug.
Розпиновка та роз’єм відповідають інтерфейсу Pixhawk Debug Full, визначеному в інтерфейсі Pixhawk Connector Standard (роз’єм JST SM10B).
| Pin | Сигнал | Вольт |
|---|---|---|
| 1 (red) | Vtref | +3.3V |
| 2 (blk) | Консоль TX (OUT) | +3.3V |
| 3 (blk) | Консоль RX (IN) | +3.3V |
| 4 (blk) | SWDIO | +3.3V |
| 5 (blk) | SWCLK | +3.3V |
| 6 (blk) | SWO | +3.3V |
| 7 (blk) | NFC GPIO | +3.3V |
| 8 (blk) | PH11 | +3.3V |
| 9 (blk) | nRST | +3.3V |
| 10 (blk) | GND | GND |
Інформацію про підключення та використання цього порту див:
- Системна консоль PX4 (Зауважте, що консоль FMU зіставляється з USART3).
- SWD Debug Port
Периферія
Підтримувані платформи / Airframes
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. Повний набір підтримуваних конфігурацій можна переглянути в розділі Довідник про планери Copter(Вертоліт).