3D Моделі OctoMap з ROS/Gazebo Classic
Бібліотека OctoMap - це бібліотека з відкритим кодом для генерації об'ємних моделей 3D середовища з даних датчиків. Дані цієї моделі потім можуть використовуватись дроном для навігації та уникнення перешкод.
У цьому посібнику описано як використовувати OctoMap з Gazebo Classic Симулятором роторів та ROS.
Встановлення
Встановлення потребує ROS, Gazebo Classic та плагін симулятора роторів. Дотримуйтесь інструкцій Симулятора роторів для встановлення.
Далі - встановіть бібліотеку OctoMap:
sh
sudo apt-get install ros-indigo-octomap ros-indigo-octomap-mapping
rosdep install octomap_mapping
rosmake octomap_mappingТепер відкрийте ~/catkin_ws/src/rotors_simulator/rotors_gazebo/CMakeLists.txt та додайте наступні рядки в кінець файлу:
sh
find_package(octomap REQUIRED)
include_directories(${OCTOMAP_INCLUDE_DIRS})
link_libraries(${OCTOMAP_LIBRARIES})Відкрийте ~/catkin_ws/src/rotors_simulator/rotors_gazebo/package.xml та додайте наступні рядки:
xml
<build_depend>octomap</build_depend>
<run_depend>octomap</run_depend>Виконайте наступні два рядки:
INFO
Перший зміню ваш редактор оболонки за замовчуванням на gedit. Це рекомендується для користувачів, які мають мало досвіду роботи з vim (редактор за замовчування), в іншому випадку його можна опустити.
sh
export EDITOR='gedit'
rosed octomap_server octomap_tracking_server.launchта змінити наступні два рядки:
xml
<param name="frame_id" type="string" value="map" />
...
<!--remap from="cloud_in" to="/rgbdslam/batch_clouds" /-->на:
xml
<param name="frame_id" type="string" value="world" />
...
<remap from="cloud_in" to="/firefly/vi_sensor/camera_depth/depth/points" />Запуск симуляції
Виконайте наступні три рядки в окремих терміналах. Це відкриє Gazebo Classic, Rviz та сервер octomap.
sh
roslaunch rotors_gazebo mav_hovering_example_with_vi_sensor.launch mav_name:=firefly
rviz
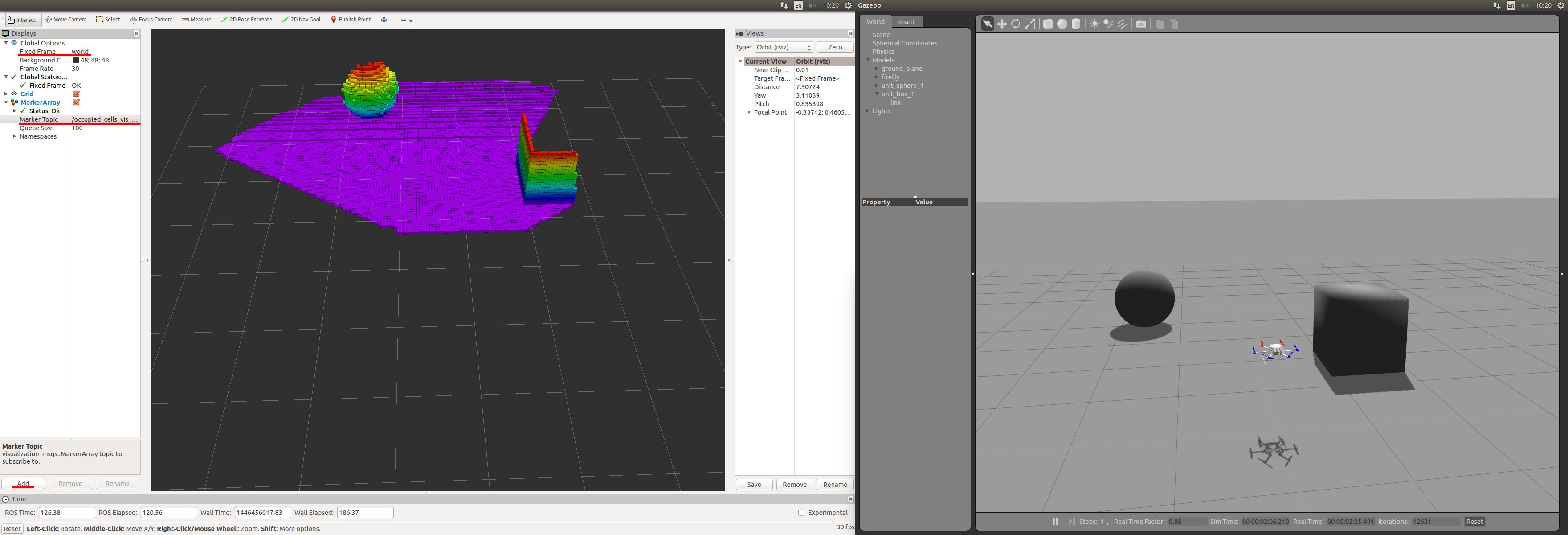
roslaunch octomap_server octomap_tracking_server.launchУ Rviz змінить поле 'Fixed Frame' з 'map' на 'world' у верхній правій частині вікна. Тепер натисніть кнопку "Додати" в нижньому лівому куті та оберіть MarkerArray. Потім двічі натисніть на MarkerArray та змініть 'Marker Topic' з /free_cells_vis_array на /occupied_cells_vis_array.
Тепер ви повинні побачити частину підлоги.
У вікні Gazebo Classic вставте куб перед червоними роторами, який ви повинні побачити у Rviz.