Режим Altitude (Фіксоване крило)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Необхідний ручний/дистанційний пульт")
")
Режим польоту Altitude (далі висоти) є найбезпечнішим та найлегшим не-GPS ручним режимом. Це полегшує пілотам контроль висоти транспортного засобу, і зокрема досягати і підтримувати фіксовану висоту. Режим не буде намагатися утримати курс транспортного засобу від вітру. Швидкість активно контролюється, якщо встановлений датчик швидкості повітря.
TIP
Режим висоти подібний до Режиму позиції в тому сенсі, що обидва режими вирівнюють транспортний засіб і підтримують висоту, коли відпускають стіки джойстика. Різниця полягає в тому, що режим позиції утримує фактичний шлях польоту (курс) стабільним проти вітру, тоді як висота лише утримує напрямок.
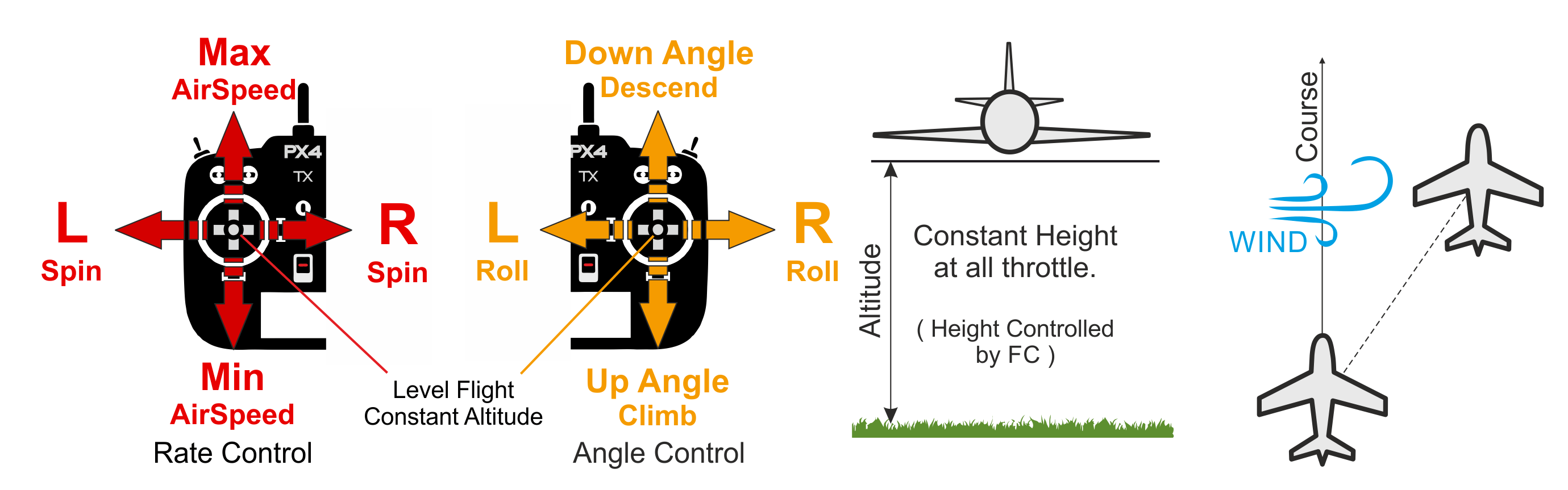
Транспортний засіб виконує координований поворот, якщо рулі не нульові, тоді як pitch -стік контролює швидкість підйому/спуску. Засувка визначає швидкість повітря — при 50% засувки літак буде утримувати свою поточну висоту з заданою крейсерською швидкістю.
Коли всі стіки відпущені/центровані (без кочення, тангажу, повороту та близько 50% керування газом), літак повернеться до прямого, рівного польоту (залежно від вітру) та збереже свою поточну висоту. Це дозволяє легко відновитися від будь-яких проблем під час польоту. Крен, тангаж та риск - всі кутово-керовані (тому неможливо перекочувати або робити петлю транспортному засобу).
Стік повороту може бути використана для збільшення/зменшення кута приводу автомобіля на поворотах. Якщо контролер фіксований у центрі, то він самостійно здійснює координацію повороту, що означає, що він застосовує необхідну швидкість розвороту для поточного кута крену, щоб виконати плавний поворот.
Діаграма нижче візуально показує поведінку візуально (для передавача режиму 2).
Технічний підсумок
Режим висоти, такий як Режима стабілізації, але зі стабілізацією висоти. Швидкість також стабілізується, якщо встановлений датчик швидкості. Курс транспортного засобу не фіксується, і він може дрейфувати по причині вітру.
- Центровані вхідні показники крену/тангажу/рискання (в межах дедбенду):
- Автопілот рівномірно підтримує транспортний засіб і утримує висоту і швидкість повітря.
- Зовнішній центр:
- Стік регулює висота польоту.
- Резервний стік керує швидкістю літального апарату, якщо підключений датчик швидкості. Без датчика швидкості, транспортний засіб летітиме прямо на малому газу (FW_THR_TRIM), збільшуючи або зменшуючи газ у міру необхідності для підйому або спуску.
- Стік керування використовує кут крена. Автопілот буде підтримувати координований польот.
- Стік крену додає додатковий значення швидкості рискання (додається до розрахованого автопілотом для підтримки координованого польоту). Може бути використаний для ручної зміни кута рискання безпілотного засобу.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Необхідне джерело вимірювання висоти (зазвичай барометр або GPS)
Параметри
Режим впливає на наступні параметри:
| Параметр | Опис |
|---|---|
| FW_AIRSPD_MIN | Мінімальна швидкість. За замовчуванням: 10 м/с. |
| FW_AIRSPD_MAX | Максимальна швидкість. За замовчуванням: 20 м/с. |
| FW_AIRSPD_TRIM | Крейсерська швидкість. За замовчуванням: 15 м/с. |
| FW_MAN_P_MAX | Установлення максимального кроку в режимі стабілізації кута нахилу. За замовчуванням: 45 градусів. |
| FW_MAN_R_MAX | Максимальне значення крена в режимі стабілізації кута нахилу. За замовчуванням: 45 градусів. |
| FW_T_CLMB_R_SP | Максимальна задана швидкість підйому. За замовчуванням: 3 м/с. |
| FW_T_SINK_R_SP | Максимальне значення зниження швидкості. За замовчуванням: 2 м/с. |