Завантаження завантажувача PX4 на системи Betaflight
Ця сторінка документує, як прошивати завантажувач PX4 на плати, які вже мають прошивку Betaflight (наприклад, <0>OmnibusF4 SD</0> або <1>Kakute F7</1>).
Є три інструменти, які можна використовувати для прошивки завантажувача PX4: Конфігуратор Betaflight, командний рядок dfu-util або графічний інструмент dfuse (тільки для Windows).
:::note Конфігуратор Betaflight є найпростішим використанням, але більш нові версії можуть не підтримувати оновлення завантажувача, який не є частиною Betaflight. Ви можете спробувати це спочатку, але скористайтеся іншими методами, якщо оновлення мікропрограми не працює. :::
Оновлення завантажувача в конфігураторі Betaflight
:::note Betaflight Configurator може не підтримувати оновлення PX4 Bootloader, на травень 2023 року. Давні версії повинні працювати, хоча точні версії не відомі. :::
Для встановлення завантажувача PX4 за допомогою Конфігуратора Betaflight:
- Завантажте або зіберіть прошивку завантажувача для плати, яку ви хочете прошивати.
- Завантажте Конфігуратор Betaflight для вашої платформи.
TIP
Якщо ви користуєтеся веб-браузером Chrome, простий крос-платформений альтернативний варіант - встановити конфігуратор як розширення звідси.
- Підключіть плату до комп'ютера і запустіть конфігуратор.
- Натисніть кнопку Завантажити прошивку [Локально].
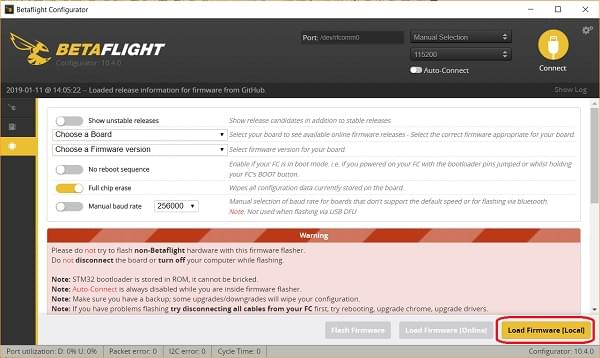
- Виберіть бінарний файл завантажувача з файлової системи, а потім прошейте плату.
Тепер ви повинні змогти встановити прошивку PX4 на плату.
Оновлення завантажувача через DFU
Цей розділ пояснює, як перепрошити завантажувач PX4 за допомогою інструменту dfu-util або графічного інструменту dfuse (тільки для Windows).
Спершу вам потрібно завантажити або зібрати прошивку завантажувача для плати, яку ви хочете прошивати (нижче це зазначено як <target.bin>).
:::note Усі наведені нижче методи є безпечними, оскільки мікроконтролер STM32 не може бути "заблокованим"! DFU не може бути перезаписано при прошивці і завжди дозволяє встановити нову прошивку, навіть якщо процес прошивки завершиться невдало. :::
Режим DFU
Обидва інструменти вимагають, щоб плата перебувала в режимі DFU. Щоб увійти в режим DFU, утримуйте кнопку завантаження (boot button) натиснутою під час підключення USB-кабеля до вашого комп'ютера. Кнопку можна відпустити після того, як плата буде ввімкнена.
dfu-util
:::note Контролери польоту Holybro Kakute H7 v2 м та міні можуть вимагати виконання додаткової команди для стирання параметрів флеш-пам'яті (щоб виправити проблеми зі збереженням параметрів):
dfu-util -a 0 --dfuse-address 0x08000000:force:mass-erase:leave -D build/<target>/<target>.binЦя команда може викликати помилку, яку можна ігнорувати. Після завершення введіть режим DFU ще раз, щоб завершити звичайне оновлення. :::
Для прошивки загрузчика на контролер польоту:
dfu-util -a 0 --dfuse-address 0x08000000 -D build/<target>/<target>.binПерезавантажте контролер польоту і дайте йому завантажитися без утримування кнопки завантаження.
dfuse
Керівництво dfuse можна знайти тут: https://www.st.com/resource/en/user_manual/cd00155676.pdf
Використовуйте інструмент для прошивки <target>.bin файлу.
Прошивка завантажувача
Інструменти вище прошивають вбудоване програмне забезпечення завантажувача. Прошивка завантажувача може бути побудована для більшості цілей за допомогою звичайного вихідного коду PX4, тоді як для інших цілей можна використовувати вихідний код з репозиторію завантажувача.
Плати управління політами, які мають цільові PX4-Autopilot make для завантажувача, можуть збудувати завантажувач із вихідного коду PX4-Autopilot. Список контролерів, яких це стосується, можна отримати, виконавши наступну команду make і зазначивши цілі make, які закінчуються на _bootloader
$make list_config_targets
...
cuav_nora_bootloader
cuav_x7pro_bootloader
cubepilot_cubeorange_bootloader
holybro_durandal-v1_bootloader
holybro_kakuteh7_bootloader
holybro_kakuteh7v2_bootloader
holybro_kakuteh7mini_bootloader
matek_h743-mini_bootloader
matek_h743-slim_bootloader
modalai_fc-v2_bootloader
mro_ctrl-zero-classic_bootloader
mro_ctrl-zero-h7_bootloader
mro_ctrl-zero-h7-oem_bootloader
mro_pixracerpro_bootloader
px4_fmu-v6u_bootloader
px4_fmu-v6x_bootloaderЩоб створити для цих контролерів польоту, завантажте та створіть джерело PX4-Autopilot, а потім створіть ціль за допомогою таких команд:
sh
git clone --recursive https://github.com/PX4/PX4-Autopilot.git
cd PX4-Autopilot
make <target> # For example: holybro_kakuteh7mini_bootloaderДля інших контролерів польоту завантажте репозиторій PX4/Bootloader і створіть вихідний код, використовуючи відповідні цілі:
git clone --recursive https://github.com/PX4/Bootloader.git
cd Bootloader
make <target> # For example: omnibusf4sd_bl or kakutef7_blПеревстановіть Betaflight
Для переключення назад на Betaflight:
- Резервне копіювання параметрів PX4. Ви можете зробити це, експортуючи їх на SD-карту.
- Натисніть і утримуйте кнопку завантажувача, підключивши USB-кабель.
- Flash Betaflight як зазвичай за допомогою Betaflight-configurator.