Holybro Pixhawk Mini (Припинено)
PX4 не виробляє цей (або будь-який інший) автопілот. Звертайтесь до виробника щодо питань апаратного забезпечення або питань відповідності. :::
Автопілот Holybro Pixhawk® Mini - це наступне покоління еволюції Pixhawk. Це близько 1/3 розміру оригінального Pixhawk та має потужніші процесори та сенсори.
Pixhawk Mini базується на відкритому проекті PX4 і був оптимізований для стеку керування польотом PX4.

Інформація щодо підключення доступна нижче.
Цей контролер польоту був розроблений компанією 3DR у співпраці з HobbyKing®. Раніше він був відомий як 3DR Pixhawk Mini. :::
TIP
Цей автопілот підтримується командами підтримки та тестування PX4. :::
Специфікації
Процесори:
- Основний процесор: STM32F427 Rev 3
- IO процесор: STM32F103
Сенсори:
- Accel/Gyro/Mag: MPU9250
- застарілий для прошивки PX4
- Accel/Gyro: ICM20608
- Barometer: MS5611
Номінальна напруга:
- Вивід модуля живлення: 4.1~5.5V
- Максимальна вхідна напруга: 45V (10S LiPo)
- Максимальне вимірювання струму: 90A
- Вхід живлення USB: 4.1`5.5V
- Вхід Servo Rail: 0~10V
Інтерфейси:
- 1 x UART Serial Port (для GPS)
- Spektrum DSM/DSM2/DSM-X® Satellite Compatible RC вхід
- Futaba S BUS® Compatible RC вхід
- PPM Sum Signal RC вхід
- I2C (для цифрових сенсорів)
- CAN (для цифрового керування мотором з сумісними контролерами)
- ADC (для аналогових сенсорів)
- Мікро USB порт
Вага та розміри:
- Розміри: 38x43x12мм
- Вага: 15.8g
Модуль GPS (постачається з комплектом):
- GNSS приймач: u-blox® Neo-M8N; компас HMC5983
- Вага: 22.4g
- Розміри: 37x37x12мм
Де придбати
Припинено.
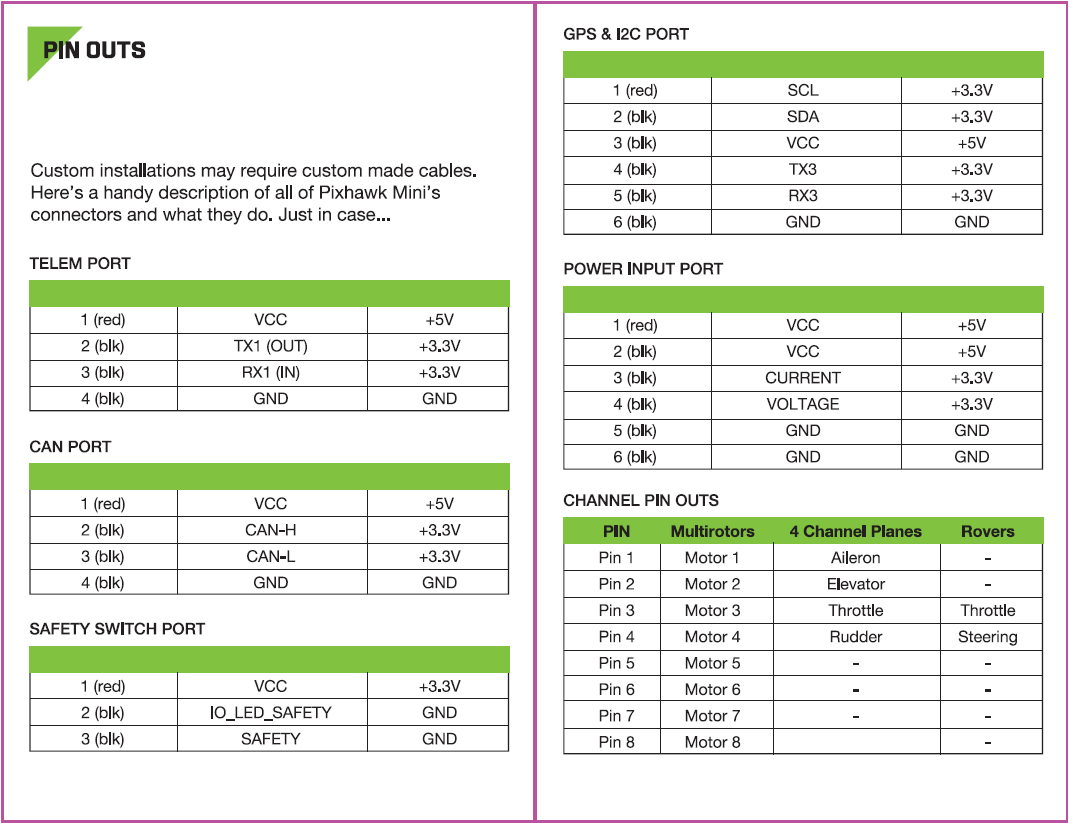
Призначення конекторів
<To be added>
Особливості
Основні функції Pixhawk Mini:
- Просунутий 32 bit ARM Cortex® M4 Processor що управляється NuttX RTOS
- 8 PWM/servo виводів
- Кілька варіантів підключення для додаткової периферії (UART, I2C, CAN)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Інтегрований перемикач безпеки та опційна зовнішня кнопка безпеки для легкої активації мотора
- Мультиколірний LED індикатор
- Інтегрований багатотональний п'єзозвуковий індикатор
- microSD-карта для довгострокового логування
- Легкі у використанні конектори Micro JST
Pixhawk Mini поставляється з новим модулем GPS:
- На основі u-blox M8N
- Одночасне приймання до 3 GNSS (GPS, Galileo, GLONASS, BeiDou)
- Найкраща в галузі навігаційна чутливість -167 dBm
- Безпека та захист цілісності
- Підтримує всі супутникові системи доповнення
- Просунуте виявлення перешкод і спуфінгу
- Варіативність продукту для задоволення вимог до продуктивності та вартості
Набір комплекту
Pixhawk Mini поставляється з наступним вмістом:
| Компонент | Зображення |
|---|---|
| Pixhawk Mini Autopilot | 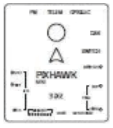 |
| Модуль GPS |  |
| Quad Power Distribution Board |  |
| 8 Channel PWM Breakout board |  |
| кабель на 4 піна (для I2C) |  |
| RC-in кабель для PPM/SBUS |  |
| 6 to 6/4 ‘Y’ адаптер для GPS та додаткових пристроїв I2C |  |
| 6-піновий кабель (2) (для плати розподілу живлення та для компасу/gps) |  |
| 6-піновий JST для легасі телеметрійного радіо до DF13 |  |
| Запобіжний перемикач |  |
| 8 Channel PWM Breakout cable | 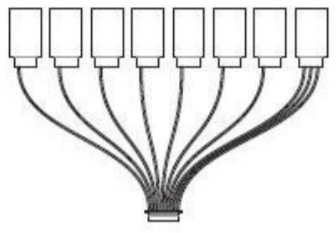 |
| Монтажна піна |  |
| I2C breakout board ? - не входить до списку запчастин у додатку | - |
Додаткові аксесуари
- Телеметричні радіо набори: 915 МГц (США), 433 МГц (Європа) ::: info При встановленні телеметричних радіостанцій 3DR використовуйте конектори, які постачаються з Pixhawk Mini, а не ті, що постачаються з радіостанціями.
- Модуль живлення 3DR 10S
- WiFi Telemetry Radio
- Цифровий датчик швидкості
Сумісність
RC радіо
- PPM вивід RC приймачів
- Spektrum DSM RC приймачі
- Futaba S BUS RC приймачі
ESC
- Всі стандартні ESC з PWM входом
Призначення пінів конекторів (виводи пінів)
Порівняння продуктів
Pixhawk Mini та Pixhawk (оригінальний)
- Одна третя розміру - від 50х81.5х15.5мм до 38x43х12мм.
- Процесор Rev 3 для повного використання 2 МБ флеш-пам'яті.
- Покращені датчики, як основний, так і додатковий IMU MPU9250 та ICM20608 відповідно. Результат - це більш стабільний, більш надійний політ і навігація.
- Модуль GPS+Компас включено. Містить Neo M8N з підтримкою GLONASS; компас HMC5983. Очікуйте швидшого та сильнішого захоплення GPS.
- Мікро JST конектори замість DF-13. З ними набагато простіше працювати.
- Інтегрований п'єзозвуковий динамік та запобіжний перемикач.
- Підтримує 4S акумулятори нативно за допомогою включеної плати розподільників потужності (PDB).
Pixhawk Mini та Pixfalcon
- Покращені датчики, як основний, так і додатковий IMU MPU9250 та ICM20608 відповідно. Очікуйте кращої обробки вібрацій та надійності.
- Інтерфейс CAN для підтримки UAVCAN.
- Включає 8-канальний вивід сервоприводу для літаків та інших апаратів, яким потрібен заживлений PWM вивід.
- Включає плату розгалуження I2C для загальної кількості 5 з'єднань I2C.
- Аналогічний розмір.
Pixhawk Mini має вдосконалений процесор та сенсорну технологію від ST Microelectronics® та операційну систему реального часу NuttX, що забезпечує відмінну продуктивність, гнучкість та надійність для керування будь-яким безпілотним транспортним засобом.
Відомі проблеми
- Деякі Pixhawk Mini мають дефект апаратного забезпечення, який робить внутрішній IMU MPU9250 ненадійним.
- Проблема присутня лише в старіших версіях апаратного забезпечення, оскільки вона була виправлена якимось чином виробником.
- Щоб перевірити, чи певна плата постраждала чи ні, залиште плату відключеною на деякий час, потім увімкніть її та спробуйте запустити драйвер mpu9250 з командного рядка PX4. Якщо плата пошкоджена, драйвер не запуститься.
- MPU9250 за замовчуванням вимкнено у вбудованому програмному забезпеченні PX4.
- Дефектні Pixhawk Mini не будуть калібруватися без зовнішнього магнітометра або підключеного GPS, навіть у приміщенні.
- При використанні зовнішнього GPS, це не проблема, оскільки вторинний ICM20608 надає акселерометр та гіроскоп, тоді як зовнішній GPS надає магнітометр.
Посібник зі швидкого запуску підключення
WARNING
Pixhawk Mini більше не виробляється або не доступний від 3DR. :::
Цей швидкий старт показує, як живити польовий контролер Pixhawk Mini та підключити його найважливіші периферійні пристрої.
Стандартна схема проводки
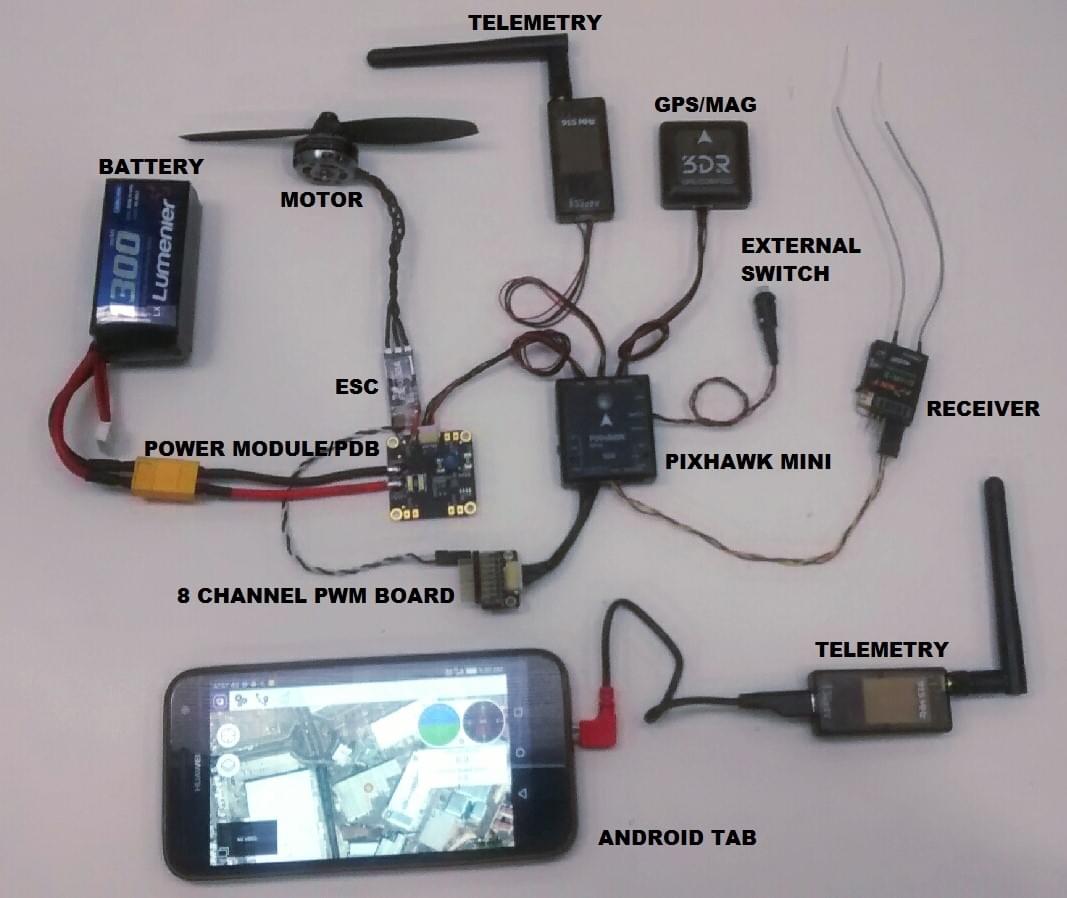
Нижче показана стандартна замовлення квадрокоптер використовуючи Набір Pixhawk Mini та 3DR Телеметрія Радіо (разом з ESC, мотором, батареєю та станцією керування на землі, яка працює на телефоні). Ми розглянемо кожен основний елемент в наступних розділах.
INFO
Вивід проводки / живлення трохи відрізняється для інших типів транспортних засобів. Це докладніше описано нижче для VTOL, Plane, Copter.
Монтаж та орієнтація контролера
Pixhawk Mini слід встановити на раму за допомогою віброгасильні поролонові накладки (входять в комплект). Вона повинна бути розташувати якомога ближче до центру тяжіння вашого автомобіля верхньою стороною вгору зі стрілкою в напрямку передньої частини автомобіля.
![]()
Якщо контролер не може бути змонтований в рекомендованій/стандартній орієнтації (наприклад, через обмеження місця), вам потрібно буде налаштувати програмне забезпечення автопілота з орієнтацією, яку ви фактично використовували: Орієнтація контролера польоту. :::
GPS + Компас
Під’єднайте 3DR GPS + Compass до порту GPS&I2C Pixhawk Mini (угорі праворуч) за допомогою 6-контактного кабелю, що входить у комплект. GPS/компас слід монтувати на раму якомога подалі від інших електронних пристроїв, з напрямком вперед транспортного засобу (відокремлення компаса від інших електронних пристроїв зменшить втручання).

NOTE - INSERT IMAGE SHOWING BOTH PORTS? OR FRONT-FACING image of GPS&I2C
Компас повинен бути калібрований перед першим використанням: Калібрування компасу
Живлення
На зображенні нижче показано типове підключення живлення при використанні Pixhawk Mini у квадрокоптері. Для цього використовується четвірна плата розподілу живлення, яка постачається в комплекті, щоб живити Pixhawk Mini і ESC/Motor від батареї (а також може живити інші аксесуари).
До Плата розподілу потужності Quad входить модуль живлення (PM), який підходить для акумуляторів <= 4S. Рекомендовано використовувати модуль живлення 3DR 10S Power (Скасовано), якщо вам потрібно більше потужності. :::
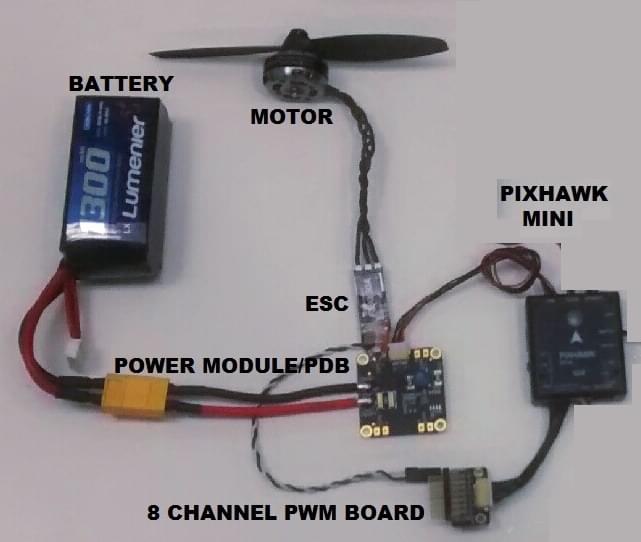
Pixhawk Mini живиться через порт PM. При використанні модуля живлення (як у цьому випадку) порт також буде читати аналогові вимірювання напруги та струму.
До 4 ESC можна живити окремо від розподільного щита (хоча в цьому випадку підключено лише один).
Сигнали керування надходять з MAIN OUT. У цьому випадку є лише один керуючий канал, який підключений до ESC через 8 канальну плату розбору PWM.
Шина виводу Pixhawk Mini (MAIN OUT) не може живити підключені пристрої (і не потребує цього в схемі, як показано). Для транспортних засобів, де MAIN OUT підключений до пристроїв, які споживають енергію (наприклад, сервопривід, використовуваний у літаку), вам потрібно буде живити рейку за допомогою BEC (елімінаційна схема батареї). Включена плата розподільчого модуля дозволяє одному каналу надавати живлення на інші виходи.
Радіоуправління
Pixhawk Mini підтримує багато різних моделей радіоприймачів:
Приймачі Spektrum і DSM підключаються до входу SPKT/DSM.

Приймачі PPM-SUM та S.BUS підключаються до порту RCIN.

Приймачі PPM та PWM, які мають окремий провід для кожного каналу, повинні підключатися до порту RCIN через PPM кодер як цей (приймачі PPM-Sum використовують один сигнальний провід для всіх каналів).
Для отримання додаткової інформації про вибір радіосистеми, сумісність приймача та зв'язок вашої передавача/приймача, див. статтю: Пульт керування передавачів& приймачів.
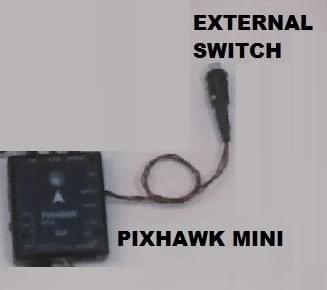
Запобіжний перемикач (опційно)
Контролер має вбудований безпечний перемикач, який ви можете використовувати для активації двигуна, як тільки автопілот готовий злетіти. Якщо на певному транспортному засобі важкодоступний до цього перемикача, ви можете прикріпити (необов’язкову) зовнішню кнопку безпеки, як показано нижче.
Телеметричні радіопередавачі
Мотори
Відображення між головними/допоміжними вихідними портами та двигунами/сервоприводами для всіх підтримуваних повітряних та наземних конструкцій перераховані в Довіднику з повітряних конструкцій.
WARNING
Відображення не є однорідним для всіх конструкцій (наприклад, ви не можете покладатися на те, що ручка газу буде на тому ж вихідному порту для всіх повітряних конструкцій). Переконайтеся, що ви використовуєте правильне зіставлення для вашого апарату.
TIP
Якщо ваша рама не вказана в довіднику, використовуйте "загальний" планер коректного типу. ::: infos:
- Вихідна шина повинна мати окреме живлення, як описано в розділі Живлення вище.
- Pixhawk Mini не може бути використаний для каркасів QuadPlane VTOL. Це через те, що QuadPlane потребує 9 виводів (4 основних, 5 додаткових) і Pixhawk Mini має лише 8 виводів (8 основних).

Інші периферійні пристрої
Підключення та конфігурація інших компонентів описано в темах для окремих периферійних пристроїв.
Конфігурація
Загальна інформація про конфігурацію описана в: Конфігурація автопілота.
Конфігурація для QuadPlane описана тут: Конфігурація QuadPlane VTOL
Збірка прошивки
TIP
Більшості користувачів не потрібно збирати цю прошивку! Вона попередньо зібрана й автоматично встановлюється за допомогою QGroundControl при підключенні відповідного апаратного забезпечення. :::
Щоб зібрати PX4 для цієї цілі:
make px4_fmu-v3_defaultВідладочний порт
Ця плата не має роз'єму для налагодження (тобто вона не має роз'єму для доступу до Системної консолі або інтерфейсу SWD).
Розробники повинні будуть припаяти дроти до підключених площин для SWD, а також до STM32F4 (IC) TX і RX, щоб отримати консоль.