Омнікоптер
Омнікоптер - це мультикоптер, який може забезпечити тягу в усіх напрямках (6 ступенів свободи). Це дозволяє йому рухатися в будь-якому напрямку без нахилу, і він може зависати під довільним кутом нахилу. Все це досягається шляхом розташування позицій двигуна і вісі тяги у певних способах:
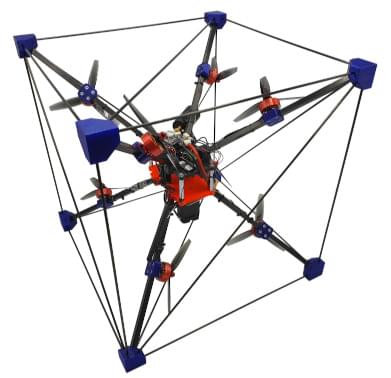
Ця конструкція слідує оригінальному дизайну від Бресчіаніні, Даріо та Рафаелло Д'Андреа.
Специфікація матеріалів
Компоненти, необхідні для цієї збірки, є:
- Електроніка:
- Контролер польоту: Holybro KakuteH7
- Пара з 2x Tekko32 F4 4in1 ESCs :::info Ви можете вибрати свій власний контролер польоту за власним вибором, він просто повинен підтримувати 8 виходів DShot. :::
- GPS: ZED-F9P
- GPS спіральна антена ::: info Будь-який інший GPS також може працювати, однак очікується, що спіральна антена буде працювати краще для перевернутих польотів. :::
- Будь-який RC приймач
- Зовнішній магнітометр. Ми використовували RM-3100.
- Телеметричний зв'язок, наприклад, WiFi
- Пропульсія:
- Двигуни: 8x BrotherHobby LPD 2306.5 2000KV/2450KV/2650KV
- 3D Гвинти: 2x HQProp 3D 5X3.5X3 3-х лопастний гвинт (набір з 4) або 2x Gemfan 513D 3-х лопастний 3D гвинт (набір з 4)
- Акумулятор: ми використовували LiPo на 6S 3300mAh. Обов'язково перевірте розміри, щоб він підійшов до рами.
- Ремінь для акумулятора
- Рама:
- 3D модель

Збірка
Рамка
Друкуйте деталі 3D :::info Орієнтація кутових частин має значення. Ви помітите, якщо це неправильно, коли кути важеля не вірні. :::
Відріжте важелі
Перевірте, що все працює, з'єднуючи частини рамки разом:
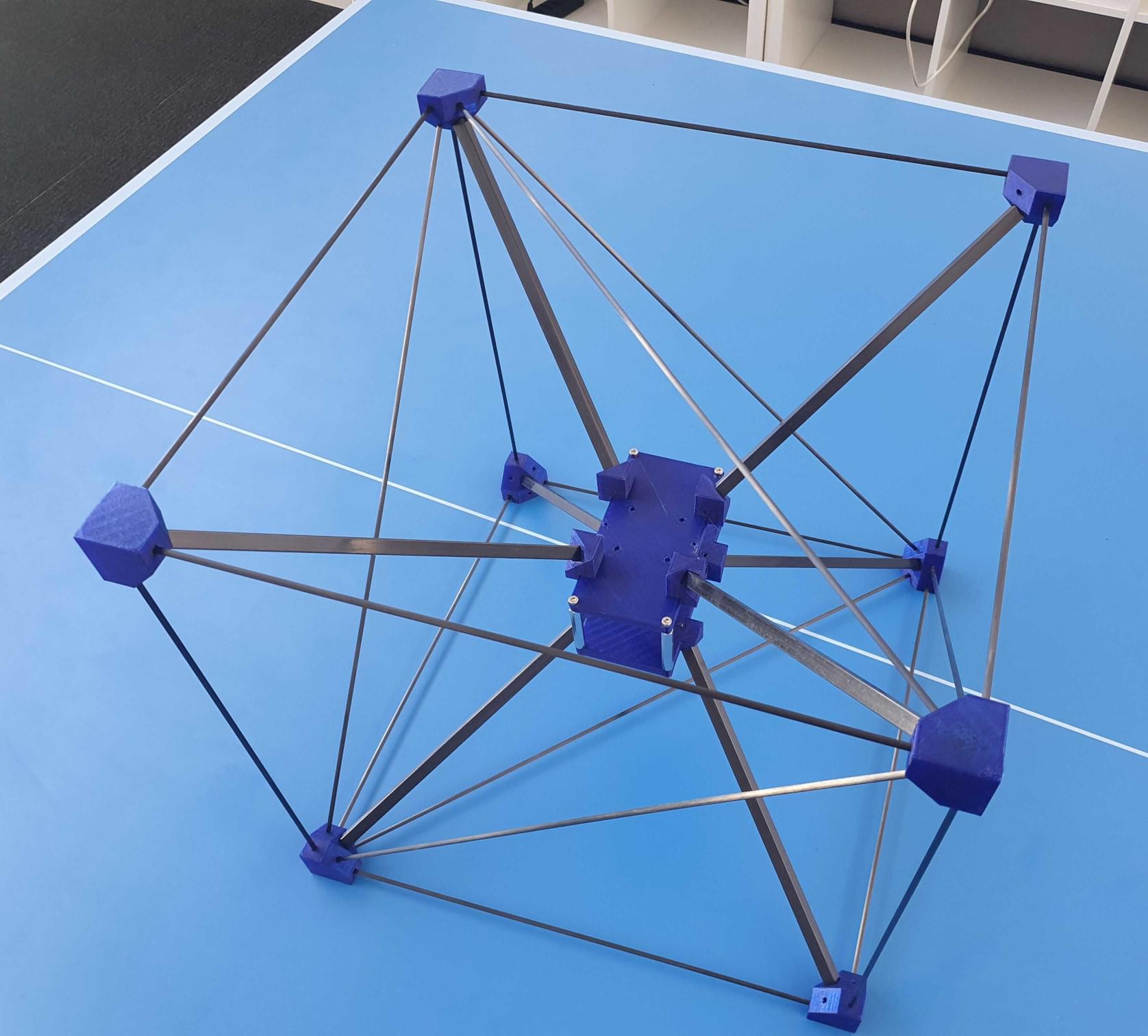
Розмістіть двигуни якомога далі від центру, без торкання гвинтів до важелів.
Електроніка
Пропаяйте периферійні пристрої до керуючого контролера. Ми використовували наступні завдання:
- Регулятори швидкості: 2 регулятори швидкості можуть бути підключені безпосередньо до двох роз'ємів KakuteH7. Щоб уникнути конфліктів, ми видалили контакт живлення (праворуч) з одного з'єднувачів.
- Телеметрія до UART1
- GPS до UART4
- RC до UART6
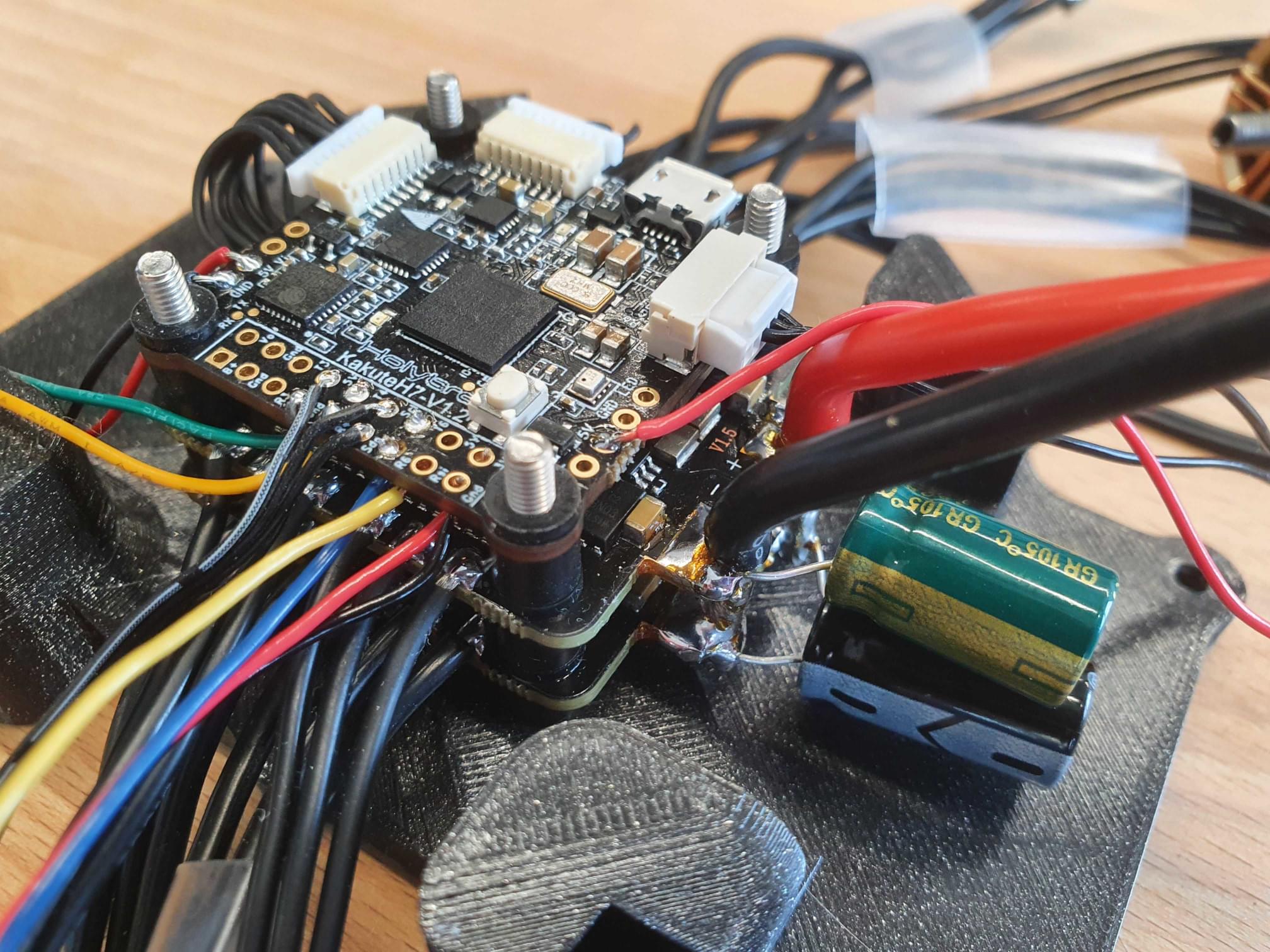
Зауваження:
- Переконайтеся, що магнітометр розташований подалі від джерел живлення. Ми закінчили тим, що розмістили його внизу центрального елементу з пінопластом товщиною 4 см.
- Покладіть деяку стрічку на барометр (не заклеюючи отвору!) для уникнення будь-якого впливу світла.
- Ми не склеїли рамку. Це безумовно рекомендується зробити після початкових випробувань, але воно може працювати без цього.
Конфігурація програмного забезпечення
ESC
Спочатку налаштуйте ESC на режим 3D (бідирекційний). Ми мали проблеми з налаштуваннями запасних ESC в режимі 3D: коли спробували змінити напрямок, мотор іноді більше не запускався, поки ESC не був перезавантажений. Так що нам довелося змінити налаштування ESC.
Для цього ви можете використовувати Betaflight на контролері польоту, а потім використовувати режим пропуску і набір BL Heli (переконайтеся, що в Betaflight налаштовано повітряну раму з 8 моторами). Це налаштування:
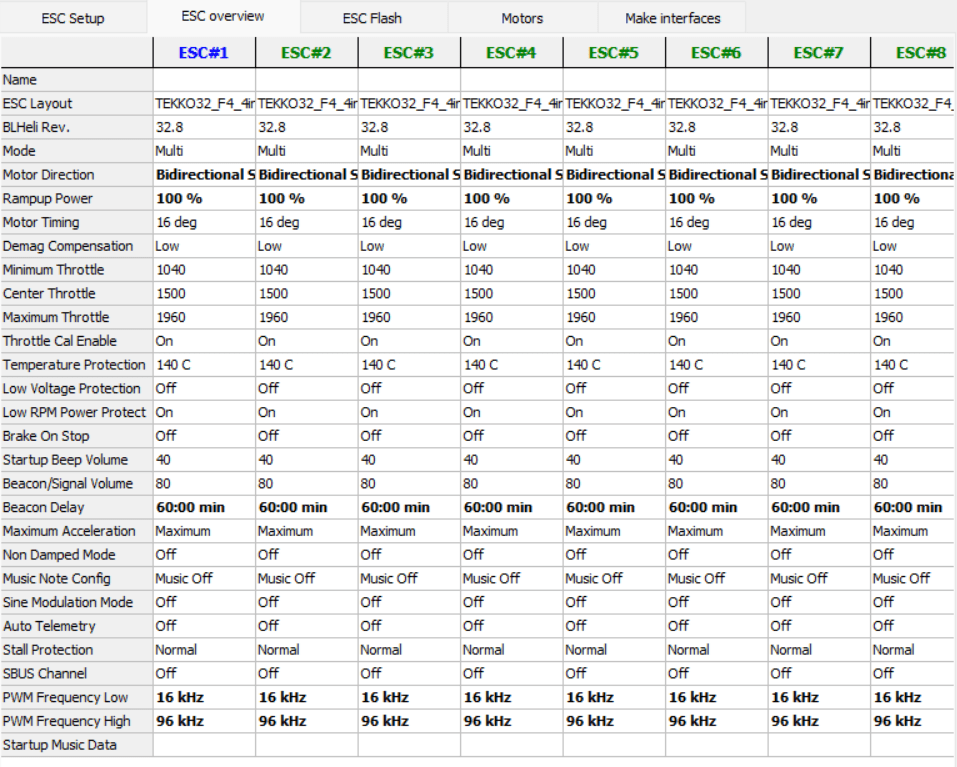
Зокрема:
- встановіть напрямок руху двигуна на Обидва напрямки
- збільшити потужність розгону до 100% (це консервативно і може знизити ефективність)
INFO
Переконайтеся, що двигуни не перегріваються зі зміненими налаштуваннями.
PX4
- Виберіть загальний корпус багатокоптерного повітряного каркасу
- Використовуйте перемикач увімкнення зброювання, не використовуйте увімкнення палицею
- Виберіть DShot як протокол виводу на всіх восьми виходах
- Налаштуйте двигуни відповідно до цього:
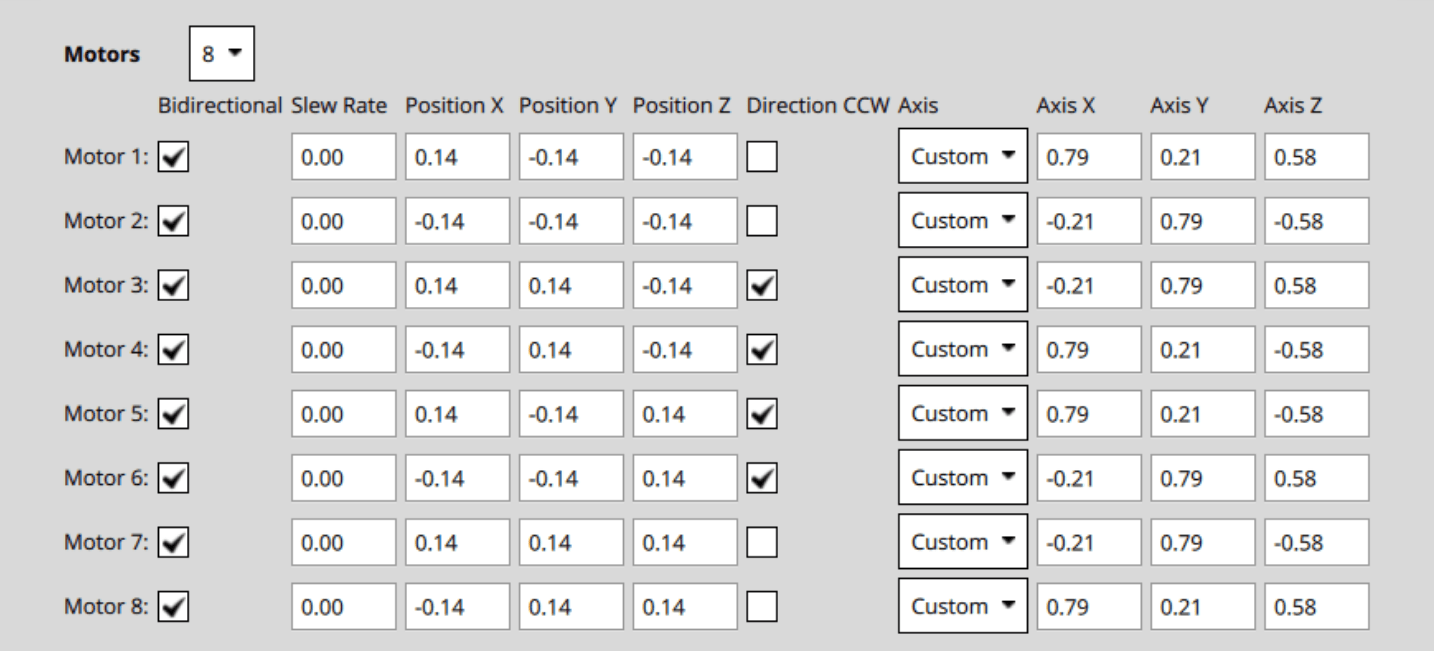 Ми використовували наступну конвенцію: двигуни спрямовані в напрямку, куди вказує вісь. Напрям обертання відповідає напряму позитивного тяги (переміщення слайдера двигуна вгору). Переконайтеся, що використовуєте правильні пропси, оскільки є версія CCW та CW.
Ми використовували наступну конвенцію: двигуни спрямовані в напрямку, куди вказує вісь. Напрям обертання відповідає напряму позитивного тяги (переміщення слайдера двигуна вгору). Переконайтеся, що використовуєте правильні пропси, оскільки є версія CCW та CW. - Параметри:
- Цей файл містить всі відповідні параметри.
Відео
Моделювання
Є мішень імітації омнікоптера в Gazebo Classic:
sh
make px4_sitl gazebo-classic_omnicopter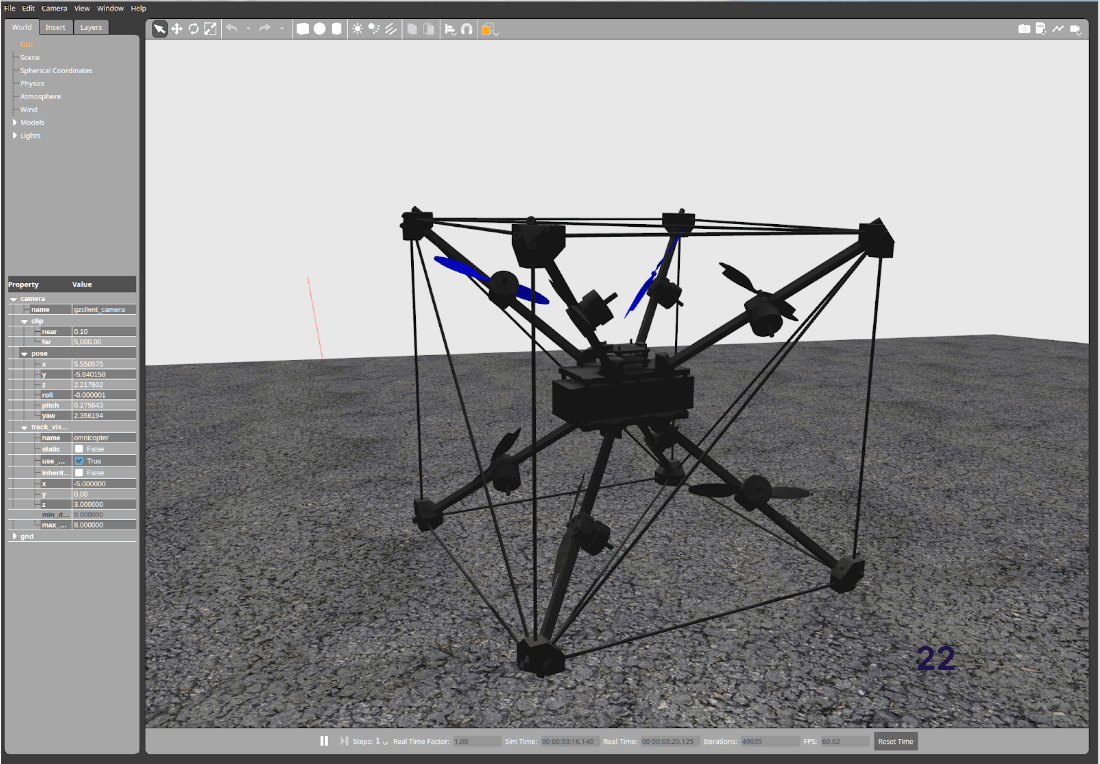
Зауваження
Деякі загальні зауваження:
- Швидкість реакції газу становить близько 30%.
- Час польоту становить близько 4-5 хвилин. Можливо, це можна трохи покращити, використовуючи більші пропелери.