PX4 Vision Autonomy Development Kit
[PX4 Vision Autonomy Development Kit] (https://holybro.com/collections/multicopter-kit/PX4-Vision) - це надійний і недорогий комплект для створення систем комп'ютерного зору на автономних пристроях.
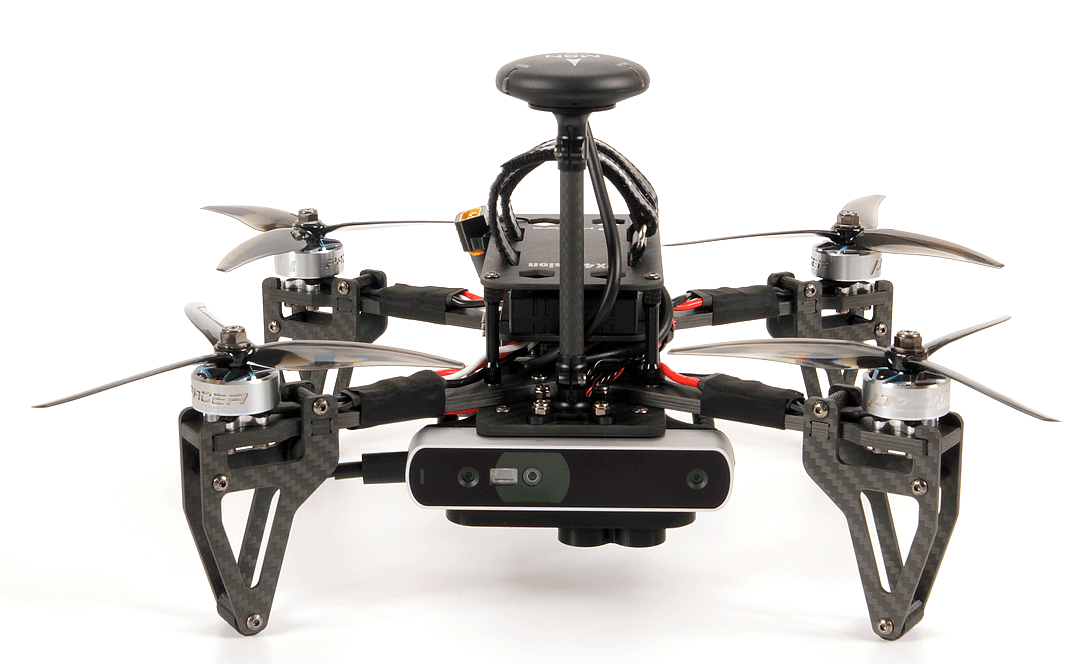
Комплект містить майже готовий до польоту квадрокоптер з вуглецевого волокна, оснащений польотним контролером Pixhawk 4 або Pixhawk 6C (на версії 1.5), комп'ютером-компаньйоном UP Core (4 ГБ пам'яті та 64 ГБ eMMC), а також камерою глибини Occipital Structure Core .
INFO
Цей пристрій не має попередньо встановленого програмного забезпечення. До комплекту входить карта пам'яті USB з прикладом реалізації функції уникнення перешкод, на основі проекту PX4 Avoidance. Цей приклад є орієнтовним і слугує для демонстрації можливостей платформи. Програмне забезпечення не сумісне з останньою версією PX4, а також не підтримується і не обслуговується.
Посібник надає інформацію про мінімальне додаткове налаштування, потрібне для того, щоб підготувати апарат до польоту (встановлення системи дистанційного керування та акумулятора). Він також описує перший політ і те, як почати модифікацію коду комп'ютерного зору.
Де купити
Зміст посібника Px4 Vision Guide
- Попередження та сповіщення
- Що всередині
- Що ще вам потрібно
- Первинне налаштування
- Керування дроном з запобіганням зіткнень
- Розробка з використанням комплекту
- Розпіновка плати PX4 Vision Carrier
- Інші ресурси для розробників
- Як отримати технічну підтримку
Попередження та сповіщення
Комплект призначений для проєктів комп'ютерного зору, які використовують камеру, спрямовану вперед (він не має камер глибини, спрямованих вниз або назад). Отже, його не можна використовувати (без модифікації) для тестування [Безпечної посадки] (../computer_vision/safe_landing.md) або інших функцій, для яких потрібна камера, спрямована вниз.
Уникання перешкод у місіях можна тестувати лише за наявності сигналу GPS (місії використовують GPS-координати). Запобігання зіткненням можна перевірити в режимі позиціювання за умови, що є стійке захоплення позиції, отримане або з GPS, або з оптичного потоку.
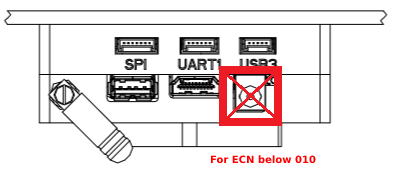
Порт, позначений
USB1, може глушити GPS, якщо його використовувати з периферійним пристроєм USB3 (вимкніть GPS-залежні функції, зокрема місії). Саме тому образ завантаження постачається на флешці USB2.0.PX4 Vision v1 з ECN 010 або вище (несуча плата RC05 і вище), UP Core може живитися як від розетки постійного струму, так і від акумулятора.

Всі PX4 Vision v1.5 UP Core можна живити як від мережі постійного струму, так і від батареї.
WARNING
For PX4 Vision v1 with ECN below 010/carrier board below RC04, the UP Core should only be powered using the battery (do not remove the UP Core power socket safety cover). This does not apply to PX4 Vision v1.5
Що всередині
INFO
Відмінності між PX4 Vision V1 і V1.5 можна знайти тут

Про те, що знаходиться всередині PX4 Vision V1, можна дізнатися тут [PX4 v1.13 Docs here] (https://docs.px4.io/v1.13/en/complete_vehicles/px4_vision_kit.html#what-is-inside).
PX4 Vision DevKit містить наступні компоненти:
Основні компоненти:
- 1x Pixhawk 4 або Pixhawk 6C (для v1.5) польотний контролер
- 1x оптичний датчик потоку PMW3901
- 1x датчик відстані TOF інфрачервоного діапазону (PSK‐CM8JL65‐CC5)
- 1x камера глибини Structure Core
- Камера з широким кутом огляду 160 градусів
- Стерео-інфрачервоні камери
- Вбудований ІМП (інерціальний модуль)
- Потужний багатоядерний процесор глибини NU3000
- 1x комп'ютер UP Core (4 ГБ оперативної пам'яті та 64 ГБ eMMC з Ubuntu та PX4 униканням)
- Intel® Atom™ x5-z8350 (до1.92 GHz)
- Сумісні ОС: повна версія Microsoft Windows 10, Linux (ubilinux, Ubuntu, Yocto), Android
- FTDI UART підключений до контролера польоту
USB1: USB3.0 Порт, який використовується для завантаження середовища уникнення PX4 з флешки USB2.0 (підключення периферійного пристрою USB3.0 може заглушити GPS).USB2: Порт USB2.0 на роз'ємі JST-GH. Може бути використаний для другої камери, LTE тощо (або клавіатури/миші під час розробки).USB3: Порт USB2.0 JST-GH, підключений до камери глибиниHDMI: HDMI вихід- SD карта
- WiFi 802.11 b/g/n @ 2,4 ГГц (підключений до зовнішньої антени №1). Дозволяє комп'ютеру отримати доступ до домашньої WiFi-мережі для доступу до Інтернету та оновлень.
Механічні характеристики:
- Каркас: Цілісна 5-міліметрова саржа з вуглецевого волокна 3k
- Мотори: T-MOTOR KV1750
- ESC: BEHEli-S 20A ESC
- GPS: M8N GPS модуль
- Модуль живлення: Holybro PM07
- Колісна база: 286мм
- Вага: 854 грами без акумулятора або гвинтів
- Телеметрія: ESP8266 підключений до польотного контролера (приєднаний до зовнішньої антени №2). Вмикає бездротове з'єднання з наземною станцією.
Флеш-накопичувач USB2.0 з попередньо завантаженим програмним забезпеченням, яке включає в себе:
- Ubuntu 18.04 LTS
- ROS Melodic
- Occipital Structure Core ROS драйвер
- MAVROS
- PX4 Avoidance
Різноманітні кабелі, 8x гвинти, 2x ремінці для акумулятора (встановлені) та інші аксесуари (їх можна використовувати для підключення додаткових периферійних пристроїв).
Що ще потрібно
Комплект містить усе необхідне обладнання для керування дроном, окрім акумулятора та системи радіоуправління, які необхідно придбати окремо:
- Батарея:
- 4S LiPo з гніздом XT60
- Довжина менше 115 мм (щоб поміститися між роз'ємом живлення та GPS-антеною)
- Системи радіо керування
- Будь-яка PX4-сумісна RC система може бути використана.
- Передавач FrSky Taranis з приймачем R-XSR - одна з найпопулярніших комбінацій.
- Шестигранний ключ H2.0 (для відкручування верхньої панелі, з метою підключення пульта дистанційного керування)
Крім того, користувачам знадобиться апаратне / програмне забезпечення для земної станції:
- Ноутбук або планшет, на якому працює QGroundControl (QGC).
Перший запуск
Підключіть сумісний RC приймач до транспортного засобу (не постачається в комплекті):
- Видаліть/відкрутіть верхню пластину (де йде батарея) за допомогою інструменту з головками шестигранника H2.0.
- Підключіть приймач до контролера польоту.
- Прикріпіть знову верхню пластину.
- Встановіть RC-приймач на плату кар'єра UP Core на задній частині транспортного засобу (використовуйте зажими або двосторонній скотч).
- Переконайтеся, що антени вільні від будь-яких перешкод і електрично ізольовані від рами (наприклад, закріпіть їх під платою або до рук або ніг транспортного засобу).
Прив'яжіть земельні та повітряні блоки керування RC (якщо ще не зроблено). Процедура прив'язки залежить від конкретної радіосистеми, яку використовують (прочитайте посібник користувача приймача).
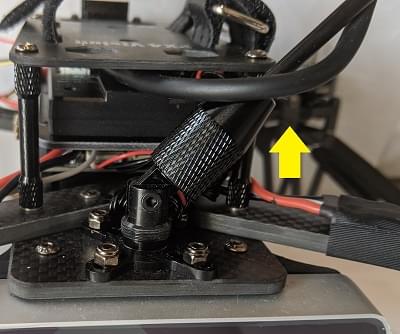
Підніміть стійку GPS до вертикального положення та вкрутіть кришку на тримач на базовій пластині. (Не потрібно для v1.5)
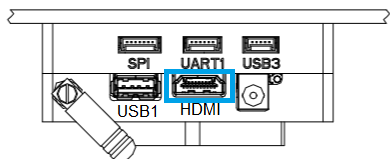
Уставте попередньо зображену USB2.0-ручку зі набору в порт UP Core, позначений як
USB1(виділено нижче).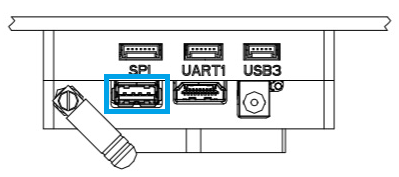
Запустіть транспортний засіб з повністю зарядженою батареєю.
INFO
Переконайтеся, що гвинти від'єднані перед підключенням батареї.
:::
Підключіть земельну станцію до мережі WiFi транспортного засобу (через кілька секунд) за допомогою наступних типових облікових даних:
- SSID: pixhawk4
- Пароль: px4vision
TIP
Ім'я мережі WiFi, пароль та інші облікові дані можуть бути змінені після підключення (за бажанням), використовуючи веб-переглядач для відкриття URL-адреси:
http://192.168.4.1. Швидкість передачі даних (baud rate) не повинна змінюватися з 921600.
:::
Почніть QGroundControl на земній станції.
Налаштувати/калібрувати транспортний засіб:
INFO
Транспортний засіб повинен прибути попередньо каліброваним (наприклад, з вбудованим програмним забезпеченням, конструкцією корпусу, батареєю та датчиками, всі встановлені). Проте вам все одно потрібно калібрувати радіосистему (яку ви щойно підключили), і часто варто повторно виконати калібрування компаса.
:::
(Опціонально) Налаштуйте перемикач режиму польоту на пульті дистанційного керування, скориставшись вибором режиму польоту.
INFO
Режими також можна змінити за допомогою QGroundControl
:::
Ми рекомендуємо визначити RC контролери для перемикачів:
- Режим позиції - безпечний ручний режим польоту, який можна використовувати для тестування запобігання зіткнень.
- Режим місії - виконуйте місії та тестуйте уникання перешкод.
- Режим повернення - повернення транспортного засобу безпечно до точки запуску та посадка.
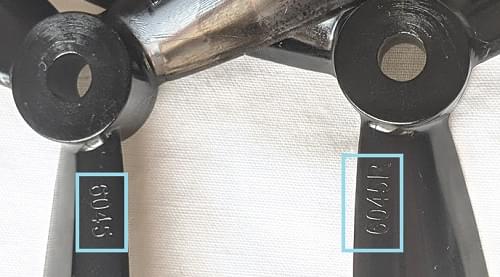
Прикріпіть гвинти з обертанням, як показано:
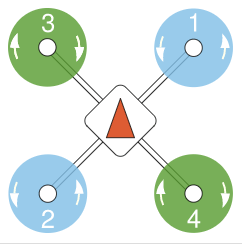
Напрямки гвинтів можна визначити за мітками: 6045 (звичайний, проти годинникової стрілки) та 6045R (обернений, за годинниковою стрілкою).
Закрутіть тісно за допомогою наданих гайок пропелера:

Політ дроном з униканням
Коли налаштування транспортного засобу, описані вище, завершені:
Підключіть батарею, щоб живити транспортний засіб.
Зачекайте, доки завершиться послідовність завантаження та система уникання розпочне роботу (транспортний засіб відхилить команди на озброєння під час завантаження).
TIP
Процес завантаження/початку роботи триває близько 1 хвилини з постачаної USB-флешки (або 30 секунд з внутрішньої пам'яті).
:::
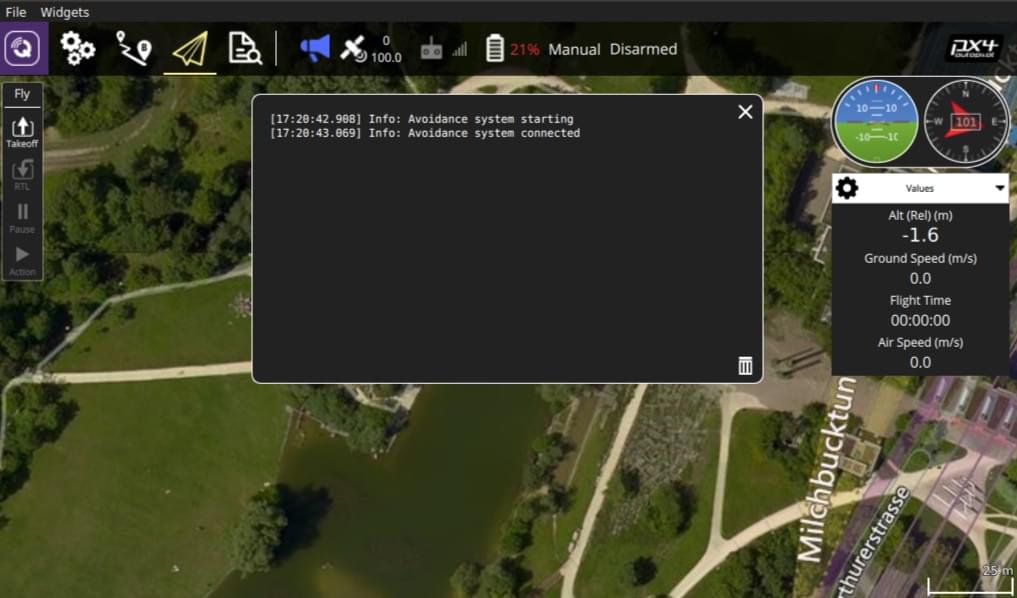
Перевірте, що система уникання почала працювати належним чином:
Журнал сповіщень QGroundControl відображає повідомлення: Підключена система уникнення.
Червоний лазер видно на передній частині камери Structure Core.
Зачекайте, доки світлодіод GPS не засвітиться зеленим кольором. Це означає, що у транспортного засобу є GPS фіксація і він готовий до польоту!
Підключіть наземну станцію до мережі WiFi транспортного засобу.
Знайдіть безпечне зовнішнє місце для польоту, ідеально з деревом або якою-небудь іншою зручною перешкодою для тестування PX4 Vision.
Для тестування попередження про зіткнення, увімкніть Режим Позиції та літайте вручну до перешкоди. Транспортний засіб повинен сповільнити і зупинитися протягом 6м від перешкоди (відстань може бути змінена за допомогою параметра CP_DIST).
Для тестування уникнення перешкод, створіть місію, де шлях блокується перешкодою. Потім перейдіть до Режиму Місії, щоб запустити місію, і спостерігайте, як транспортний засіб рухається навколо перешкоди, а потім повертається на запланований курс.
Розробка за допомогою комплекту
Наступні розділи пояснюють, як використовувати комплект як середовище для розробки програмного забезпечення комп'ютерного зору.
Огляд уникання PX4
Система PX4 Avoidance складається з програмного забезпечення комп'ютерного зору, що працює на супутниковому комп'ютері (з підключеною камерою глибини), яке надає інформацію про перешкоди та/або маршрут до стеку керування польотом PX4, який працює на контролері польоту.
Документацію про програмне забезпечення для компаньйон комп'ютерного зору/планування можна знайти на github тут: PX4/PX4-Avoidance. Проект надає ряд різних реалізацій планувальника (упакованих у вигляді вузлів ROS):
- Комплект PX4 Vision запускає localplanner за замовчуванням, і це рекомендована вихідна точка для вашого власного програмного забезпечення.
- Глобальний планувальник не був протестований з цим комплектом.
- Планер посадки потребує камери, спрямованої вниз, і не може бути використаний без попередньої модифікації кріплення камери.
PX4 та супутниковий комп'ютер обмінюються даними через MAVLink за допомогою цих інтерфейсів:
- Інтерфейс планування маршруту - API для впровадження функцій уникання в автоматичних режимах.
- Інтерфейс запобігання зіткненням - API для уникнення зіткнень на основі мапи перешкод у ручному режимі позиціонування на транспортному засобі (в даний час використовується для запобігання зіткнень).
Встановлення образу на супутній комп’ютер
Ви можете встановити зображення на UP Core та завантажитися з внутрішньої пам'яті (замість USB-накопичувача).
Це рекомендується, оскільки завантаження з внутрішньої пам'яті відбувається набагато швидше, звільняє один USB-порт і, можливо, надасть більше пам'яті, ніж ваш USB-накопичувач.
INFO
Завантаження з внутрішньої пам'яті займає близько 30 секунд при завантаженні із поставлених USB2 завантажувачів (інша карта може тривати кілька разів довше).
Щоб прошити зображення USB для UP Core:
Вставте передфлешний USB-накопичувач у порт UP Core, позначений як
USB1.Увійдіть в супровідний комп'ютер (як описано вище).
Відкрийте термінал та виконайте наступну команду, щоб скопіювати зображення на внутрішню пам'ять (eMMC). Термінал буде пропонувати ввести кількість відповідей під час процесу прошивки.
shcd ~/catkin_ws/src/px4vision_ros/tools sudo ./flash_emmc.shINFO
Всю інформацію, збережену в комп'ютері UP Core, буде видалено при виконанні цього сценарію.
:::
Витягніть USB-флешку.
Перезавантажте пристрій. Тепер ком'ютер UP Core буде завантажений з внутрішньої пам'яті (eMMC).
Запустіть супутній комп'ютер
Спочатку вставте наданий USB2.0-накопичувач у порт UP Core, позначений USB1, а потім включіть живлення пристрою за допомогою батареї 4S. Система уникнення перешкод повинна почати працювати приблизно за 1 хвилину (хоча це залежить від встановленої USB-флешки).
TIP
Політ дроном з униканням колізій додатково пояснює, як перевірити, що система уникання перешкод активна.
Якщо ви вже встановили зображення на супутньому комп'ютері, ви можете просто увімкнути транспортний засіб (тобто не потрібен USB-накопичувач). Система уникання повинна бути активована та працювати протягом близько 30 секунд.
Після початку роботи компаньйонний комп'ютер може бути використаний як середовище розробки комп'ютерного зору, так і для запуску програмного забезпечення.
Увійдіть в бортовий комп'ютер
Для входу на компаньйоновий комп'ютер:
Підключіть клавіатуру та мишу до UP Core через порт
USB2: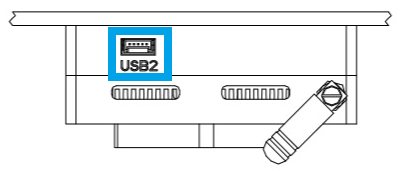
Використовуйте кабель USB-JST з комплекту, щоб отримати роз'єм USB A

До кабелю можна підключити USB хаб, якщо клавіатура та миша мають окремі роз'єми.
Підключіть монітор до порту HDMI UP Core.
Екран входу в Ubuntu повинен з'явитися на моніторі.
Увійдіть в UP Core за допомогою облікових даних:
- Username: px4vision
- Password: px4vision
Розробка / Розширення уникнення PX4
Комп'ютер UP Core PX4 Vision надає повне та повністю налаштоване середовище для розширення програмного забезпечення PX4 Avoidance (і, загалом, для розробки нових алгоритмів комп'ютерного зору за допомогою ROS 2). Ви повинні розробляти та тестувати своє програмне забезпечення на транспортному засобі, синхронізувати його з власним git-сховищем та ділитися будь-якими виправленнями та покращеннями з широкою спільнотою PX4 на репозиторії github PX4/PX4-Avoidance.
Робочий простір catkin знаходиться в ~/catkin_ws, і попередньо налаштований для запуску локального планувальника уникнення PX4. Файл запуску з включенням (avoidance.launch) знаходиться в пакеті px4vision_ros (змініть цей файл, щоб змінити, який планувальник запускається).
Пакет уникнення запускається при завантаженні. Для інтеграції іншого планувальника це потрібно вимкнути.
Вимкніть процес уникання за допомогою наступної команди:
shsystemctl stop avoidance.serviceВи можете просто перезавантажити машину, щоб перезапустити службу.
Інші корисні команди підтримуються:
sh# restart service systemctl start avoidance.service # disable service (stop service and do not restart after boot) systemctl disable avoidance.service # enable service (start service and enable restart after boot) systemctl enable avoidance.serviceВихідний код пакету уникання перешкод можна знайти за адресою https://github.com/PX4/PX4-Avoidance, який розташований в
~/catkin_ws/src/avoidance.Внесіть зміни до коду! Щоб отримати останній код уникання, витягніть код з репозиторію уникання:
shgit pull origin git checkout origin/masterПобудуйте пакет
shcatkin build local_planner
Робоче середовище ROS розміщене в ~/catkin_ws. Для посилання на розробку в ROS та використання робочого простору catkin, див. Посібники ROS catkin.
Розробка прошивки PX4
Набір призначений для створення програмного забезпечення комп'ютерного зору, яке працює на супутниковому комп'ютері, та яке інтегрується з гнучкими інтерфейсами планування шляху та запобігання зіткнень PX4.
Ви також можете змінити сам PX4, та встановити його як власне прошивку:
- Для оновлення прошивки вам потрібно підключити QGroundControl до Pixhawk комплекту через USB.
- Оберіть корпус PX4 Vision DevKit після завантаження нового прошивки:

INFO
Модифікація коду PX4 не потрібна для задоволення більшості випадків використання комп'ютерного зору. Щоб обговорити інтерфейси або способи інтеграції інших функцій, приєднуйтесь до каналів підтримки PX4.
Виводи пінів плати-носія PX4 Vision
Інформацію про PX4 Vision 1.15 можна знайти за посиланням https://docs.holybro.com. Пін-роз'єми плати переносу та інша інформація знаходяться у розділі завантаження.
Інші Ресурси Розробника
- UP Core Wiki - Up Core супутниковий комп'ютер технічна інформація
- Форум розробників Occipital - інформація про камеру Structure Core
- Огляд Pixhawk 4
- Огляд Pixhawk 6C
- ПЗ4 Уникнення програмне забезпечення/документація
- Інтерфейс планування маршруту
Як отримати технічну підтримку
Щодо апаратних проблем, будь ласка, звертайтеся до Holybro за адресою: productservice@holybro.com.
Для проблем з програмним забезпеченням використовуйте наступні канали підтримки спільноти: