Оптичний потік
Датчики оптичного потоку використовують камеру та датчик відстані направлені вниз для оцінки швидкості.
@youtube Відео: PX4 утримує позицію за допомогою датчика потоку ARK для оцінки швидкості (у Режим позиції).
Установка
Налаштування оптичного потоку вимагає камери, спрямованої вниз, та датчика відстані (найкраще LiDAR). Ці можуть бути підключені через MAVLink, I2C або будь-яку іншу шину, яка підтримує периферійні пристрої.
:::note Якщо підключено до PX4 через MAVLink, пристрій оптичного потоку повинен публікувати в тему OPTICAL_FLOW_RAD, а датчик відстані повинен публікувати в тему DISTANCE_SENSOR. :::
Вихід потоку при руху в різних напрямках повинен бути наступним:
| Рух транспортного засобу | Інтегрований потік |
|---|---|
| Вперед | + Y |
| Назад | - Y |
| Справа | - X |
| Зліва | + X |
Для чистих обертань integrated_xgyro та integrated_x (відповідно integrated_ygyro та integrated_y) повинні бути однаковими.
Популярним варіантом є PX4Flow та Lidar-Lite, як показано нижче.
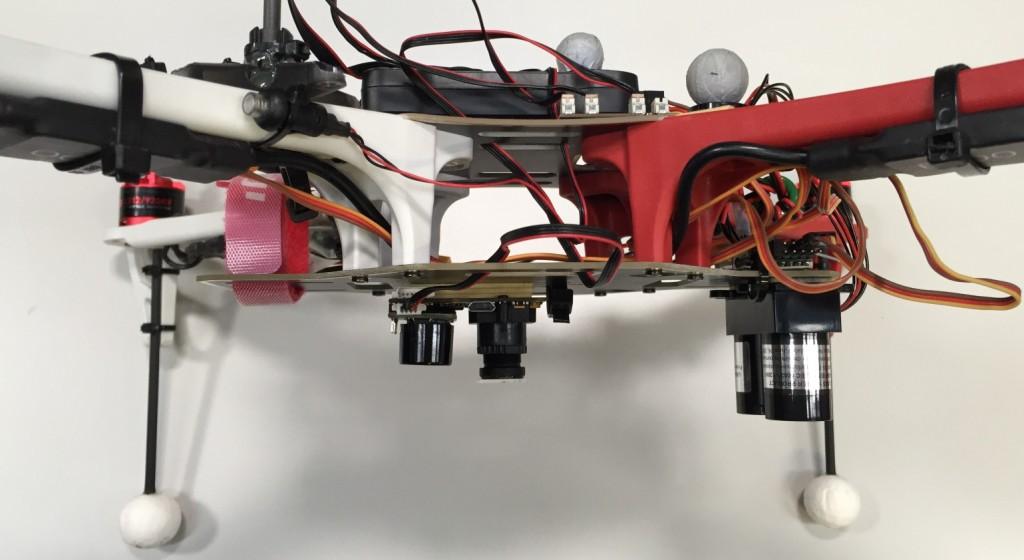
Дані сенсора від пристрою оптичного потоку об'єднуються з іншими джерелами даних швидкості. Підхід, який використовується для об'єднання даних сенсора та будь-яких зміщень від центру транспортного засобу, повинен бути налаштований в оцінювачі.
Датчики потоку/Камери
ARK Flow
ARK Flow є оптичним датчиком потоку для DroneCAN, датчиком відстані та ІНС. В ньому є оптичний датчик потоку PAW3902, оптичний датчик відстані Broadcom AFBR-S50LV85D на відстані 30 метрів та ІМП-датчик BMI088.
Датчики на основі PMW3901
PMW3901 є оптичним сенсором відстеження потоку, схожим на те, що ви знайдете в комп'ютерній мишці, але адаптованим для роботи від 80 мм і безмежжя. Він використовується в ряді продуктів, включаючи деякі від: Bitcraze, Tindie, Hex, Thone та Alientek.
Інші Камери/Сенсори
Також можна використовувати дошку/квадрокоптер, яка має вбудовану камеру. Для цього можна використовувати репозиторій Optical Flow (див. також snap_cam).
Далекомір
Ви можете використовувати будь-який підтримуваний датчик відстані. Проте ми рекомендуємо використовувати LIDAR замість зондів сонар, через їхню надійність та точність.
Оцінювач
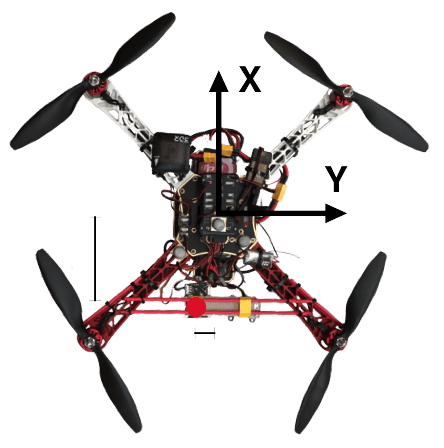
Оцінювачі об'єднують дані з датчика оптичного потоку та інших джерел. Налаштування для виконання злиття, а також відносні зсуви до центру транспортного засобу повинні бути вказані для використаного оцінювача.
Зміщення обчислюються відносно орієнтації транспортного засобу та центру, як показано нижче:
Оптична навігація на основі потоку даних активована обома доступними оцінювачами: EKF2 та LPE (застарілий).
Розширений фільтр Калмана (EKF2)
Для об'єднання оптичного потоку за допомогою EKF2 встановіть EKF2_OF_CTRL.
Якщо ваш оптичний датчик потоку зміщений від центру транспортного засобу, ви можете встановити це за допомогою наступних параметрів.
| Параметр | Опис |
|---|---|
| EKF2_OF_POS_X | Позиція X оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |
| EKF2_OF_POS_Y | Позиція Y оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |
| EKF2_OF_POS_Z | Позиція Z оптичного потоку фокусної точки в системі тіла (за замовчуванням 0.0 м). |