Holybro Kakute H7
PX4 v1.13PX4 не виробляє цей (чи будь-який інший) автопілот. Зверніться до виробника щодо підтримки апаратного забезпечення чи відповідності вимогам.
Holybro Kakute H7 є повним набором функцій, включаючи подвійні роз'єми ESC 4in1 plug-and-play, роз'єм для HD-камери, барометр, OSD, 6x UART, слот для картки пам'яті Blackbox MicroSD, BEC на 5В та 9В, зручне розташування для паяння та багато іншого.
Kakute H7 базується на кращих рисах свого попередника, Kakute F7, та подальші вдосконалюють апаратні компоненти та компонування. Подвійні роз'єми підключення 4-в-1 ESC спрощують підтримку конфігурацій x8 та Octocopter, забезпечуючи простоту збирання.
Плата також має вбудований барометр, світлодіод & п'єзоімпульс, а також плату I2C (SDA & SCL) для зовнішніх GPS/магнітомерів.
Цей польотний контролер підтримується виробником.
Ключові особливості
- MCU: Процесор STM32H743 32-біт, який працює на частоті 480 МГц
- IMU: MPU6000
- Барометр: BMP280
- OSD: AT7456E
- Bluetooth-чіп на борту: вимкнено з PX4
- 2x порт JST-SH1.0_8pin (для одиночних або 4-в-1 ESCs, сумісний з x8/Octocopter plug & play)
- 1x порт JST-GH1.25_6pin (для HD-системи, такої як Caddx Vista & Air Unit)
- Напруга вхідної батареї: 2S - 8S
- BEC 5В 2A &Cont.
- BEC 9В 1.5A Cont.
- Монтаж: 30,5 х 30,5 мм / отвір Φ4 мм з прокладками Φ3 люверси
- Розміри: 35x35мм
- Вага: 8г
Де придбати
Плату можна придбати в одному з наступних магазинів (наприклад):
TIP
Kakute H7 призначений для сумісної роботи з Tekko32 4-в-1 ESC і може бути придбаний в комплекті.
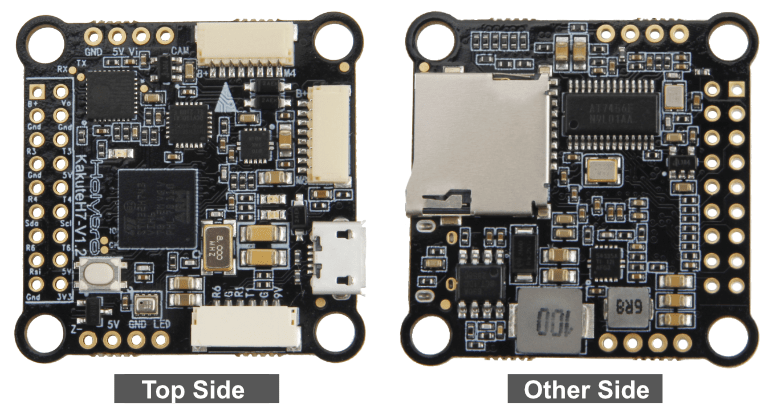
Конектори та контакти
Це сілкскрін для Kakute H7, що показує верхню частину плати:

| Пін | Функція | PX4 default |
|---|---|---|
| B+ | Позитивна напруга батареї (2S-8S) | |
| SDA, SCL | Підключення I2C (для периферійних пристроїв) | |
| 5V | Вихід 5В (максимум 2A) | |
| 3V3 | Вихід 3.3В (максимум 0.25A) | |
| VI | Відеовхід з камери FPV | |
| VO | Відеовихід на відеопередавач | |
| CAM | Контроль OSD камери | |
| G або GND | Заземлення | |
| RSI | Аналоговий вхід RSSI (0-3,3 В) від приймача | |
| R1, T1 | UART1 RX та TX | TELEM1 |
| R3, T3 | UART3 RX та TX | Консоль відлагодження NuttX |
| R4, T4 | UART4 RX та TX | GPS1 |
| R6, T6 | UART6 RX та TX (R6 також розташований в GH plug) | RC порт |
| R7 | UART7 RX (RX знаходиться у роз'ємах для використання з 4-в-1 ESC) | Телеметрія DShot |
| LED | Дріт сигнальний для адресованих світлодіодів WS2182 (не тестувався) | |
| Z- | Негативна нога п'єзожучка (Підключіть позитивну ногу динаміку до контакту 5В) | |
| M1 to M4 | Вихід сигналу двигуна (розташований у роз'ємі для використання в 4-в-1 ESC) | |
| M5 to M8 | Вихід сигналу двигуна (розташований у роз'ємі для використання в 4-в-1 ESC) | |
| Boot | Кнопка завантажувача |
Оновлення завантажувача PX4
Плата поставляється із заздалегідь встановленою Betaflight. Перед встановленням прошивки PX4 необхідно прошити заванажувач PX4. Завантажте завантажувальний бінарний файл kakuteh7_bl.hex та прочитайте цю сторінку для інструкцій з прошивки.
Створення прошивки
Щоб створити PX4 для цієї цілі:
make holybro_kakuteh7_defaultВстановлення прошивки PX4
Прошивку можна встановити будь-якими звичайними способами:
Збудуйте та завантажте джерело
make holybro_kakuteh7_default uploadЗавантажте прошивку за допомогою QGroundControl. Ви можете використовувати або готове вбудоване програмне забезпечення, або власне користувацьке програмне забезпечення.
INFO
Якщо ви завантажуєте готове програмне забезпечення через QGroundcontrol, вам необхідно використовувати щоденну версію QGC або версію QGC новішу за 4.1.7.
Налаштування PX4
Крім основної конфігурації, важливі наступні параметри:
| Параметр | Налаштування |
|---|---|
| SYS_HAS_MAG | Це має бути вимкнено, оскільки у платі немає внутрішнього магніту. Ви можете активувати це, якщо приєднаєте зовнішній магніт. |
Зіставлення послідовних портів
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | TELEM1 |
| USART3 | /dev/ttyS2 | Консоль відладки |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | RC SBUS |
| UART7 | /dev/ttyS5 | Телеметрія ESC (DShot) |
Відладочний порт
Системна консоль
UART3 RX та TX налаштовані для використання як Системна Консоль.
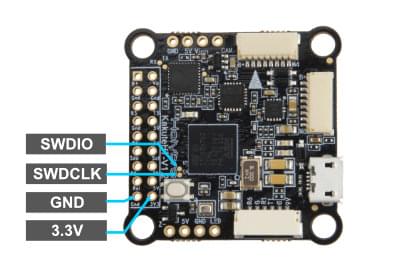
SWD
Інтерфейс SWD (JTAG) має такі контакти:
SWCLK: Тестова точка 2 (Pin 72 на процесорі)SWDIO: Тестова точка 3 (Pin 76 на процесорі)GND: Як позначено на платіVDD_3V3: Як позначено на платі
Ці показані нижче.