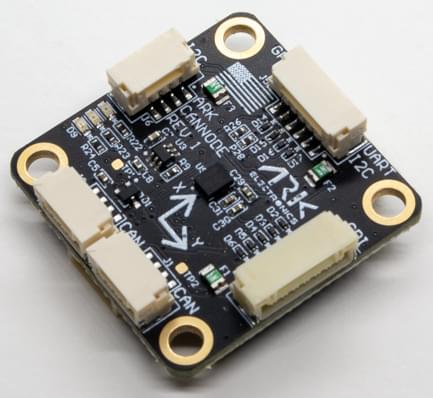
ARK CANnode
ARK CANnode - це опенсорсний DroneCAN вузол, який включає 6 ступенів свободи IMU. Його основна мета - дозволити використання датчиків, що не є CAN (I2C, SPI, UART) на шині CAN. Також він має виходи PWM для розширення вихідних сигналів транспортного засобу за кількістю та фізичною відстанню.
Де купити
Замовте цей модуль з:
- Ark Electronics (США)
Характеристики обладнання
- Open Source Schematic and BOM
- Датчики
- Bosch BMI088 6-Axis IMU або Invensense ICM-42688-P 6-Axis IMU
- STM32F412CGU6 MCU
- 1MB Flash
- Два роз'єми стандарту CAN для Pixhawk
- 4-контактний JST-GH
- Роз'єм для налагодження стандарту Pixhawk I2C
- 4-контактний JST-GH
- Стандартний коннектор UART/I2C для Pixhawk (Основний порт GPS)
- 6-контактний JST-GH
- Роз'єм стандарту SPI для Pixhawk
- 7-контактний JST-GH
- Коннектор PWM
- 10-контактний JST-SH
- 8 PWM виводів
- Відповідно до схеми підключення штирьових роз'ємів Pixhawk 4 PWM
- Роз'єм для налагодження стандарту Pixhawk
- 6-контактний JST-GH
- Малий форм-фактор
- 3см x 3см x 1.3см
- LED індикатори
- USA Built
- Вимоги до живлення
- 5В
- Сила струму залежить від підключених пристроїв
Налаштування обладнання
Підключення
ARK CANnode підключений до шини CAN за допомогою стандартного кабелю JST GH з чотирма контактами Pixhawk. Для отримання додаткової інформації, зверніться до інструкцій з проводки CAN.
Налаштування прошивки
ARK CANnode працює з Прошивкою PX4 DroneCAN. Таким чином, він підтримує оновлення прошивки через шину CAN та dynamic node allocation.
Плати ARK CANnode поставляються з останнім вбудованим програмним забезпеченням, але якщо ви хочете побудувати й прошити останнє програмне забезпечення самостійно, див. PX4 DroneCAN Firmware > Building the Firmware.
- Ціль прошивки:
ark_cannode_default - Ціль завантажувача:
ark_cannode_canbootloader
Налаштування режиму польоту
Увімкнення DroneCAN
Для використання плати ARK CANnode підключіть її до шини CAN Pixhawk та увімкніть драйвер DroneCAN, встановивши параметр UAVCAN_ENABLE на 2 для динамічного призначення вузла (або 3, якщо використовуєте DroneCAN ESCs).
Кроки наступні:
- У QGroundControl встановіть параметр UAVCAN_ENABLE на
2або3та перезавантажте (див. Finding/Updating Parameters). - Підключіть ARK CANnode CAN до Pixhawk CAN.
Після активації модуль буде виявлено при завантаженні.
Конфігурацію DroneCAN в PX4 пояснено більш детально в DroneCAN > Enabling DroneCAN.
Увімкнення датчику
Вам потрібно буде увімкнути підписника, відповідного для кожного з сенсорів, які підключені до ARK CANnode.
Це робиться за допомогою параметрів, названих, наприклад, UAVCAN_SUB_* у посиланні на параметри (таких як UAVCAN_SUB_ASPD, UAVCAN_SUB_BARO тощо).
Конфігурування CANNode Ark
На ARK CANnode вам може знадобитися налаштувати наступні параметри:
| Параметр | Опис |
|---|---|
| CANNODE_TERM | Вбудована завершення шини CAN. |
Значення LED індикаторів
Ви побачите як червоні, так і сині світлодіоди на ARK CANnode, коли він прошивається, і сталий синій світлодіод, якщо він працює належним чином.
Якщо ви бачите червоний світлодіод, це означає, що виникла помилка, і вам слід перевірити наступне:
- Переконайтеся, що у польотному контролері встановлено SD-картку.
- Переконайтеся, що ARK CANnode має встановлене
ark_cannode_canbootloaderперед тим, як прошиватиark_cannode_default. - Видаліть бінарні файли з кореневих та каталогів ufw SD-карти та спробуйте зібрати та знову прошити.