Holybro QAV250 + Pixhawk 4 Mini Build (Припинено)
Комплект Holybro Pixhawk 4 Mini QAV250 більше не доступний.
Інструкції залишено тут, оскільки дуже схожі комплекти на основі Pix32 v6 доступні тут. Ці інструкції все ще можна виконувати (і можуть бути оновлені до Pix32 v6).
Повні комплекти включають карбонову раму для гонок QAV250, контролер польоту та майже всі інші необхідні компоненти (окрім акумулятора та приймача). Є варіанти набору як з підтримкою FPV, так і без неї. Ця тема надає повні інструкції для збирання комплекту та налаштування PX4 з використанням QGroundControl.
Основна Інформація
- Каркас: Holybro QAV250
- Контролер польоту: Pixhawk 4 Mini
- Час зборки (приблизно): 3.5 hours (2 for frame, 1.5 autopilot installation/configuration)

Швидкий старт керівництво
Керівництво початку роботи з комплектом Pixhawk 4 Mini QAV250
Специфікація матеріалів
Набір Holybro QAV250 Kit включає майже всі необхідні компоненти:
- Holybro Transceiver Telemetry Radio V3
- Модуль живлення holybro
- Повністю зібрана плата керування живленням з ESC
- Двигуни - DR2205 KV2300
- 5-дюймові пластикові стійки
- Вуглепластиковий планер 250 з обладнанням
- Камера Foxer
- Vtx 5.8ghz
Додатково вам знадобиться акумулятор та приймач (+сумісний передавач). Ця збірка використовує:
- Отримувач: FrSSKY D4R-II
- Батарея: 4S 1300 мАг
Обладнання
У цьому розділі перераховано все обладнання для встановлення рами та автопілота.
Frame QAV250
| Опис | Кількість |
|---|---|
| Каркасна пластина Unibody | 1 |
| Кришка контролера польоту | 1 |
| PDB | 1 |
| Пластина камери | 1 |
| 35-міліметрові стійки | 6 |
| Вінілові гвинти та гайки | 4 |
| Cталеві шурупи 15 мм | 8 |
| Сталеві гайки | 8 |
| Cталеві шурупи 7 мм | 12 |
| Акумуляторний ремінь на липучці | 1 |
| Піна для акумуляторів | 1 |
| Посадкові майданчики | 4 |

Електроніка
| Опис | Кількість |
|---|---|
| Двигуни - DR2205 KV2300 | 4 |
| Повністю зібрана плата керування живленням з ESC | 4 |
| Модуль живлення Holybro | 1 |
| Приймач Fr-sky D4R-II | 1 |
| Pixhawk 4 mini | 1 |
| Holybro GPS Neo-M8N | 1 |
| Holybro Transceiver Telemetry Radio V3 | 1 |
| Акумуляторна батарея люмінесцентної лампи 1300 mAh 4S 14.8V | 1 |
| Vtx 5.8gHz | 1 |
| FPV-камера (тільки для повного комплекту) | 1 |
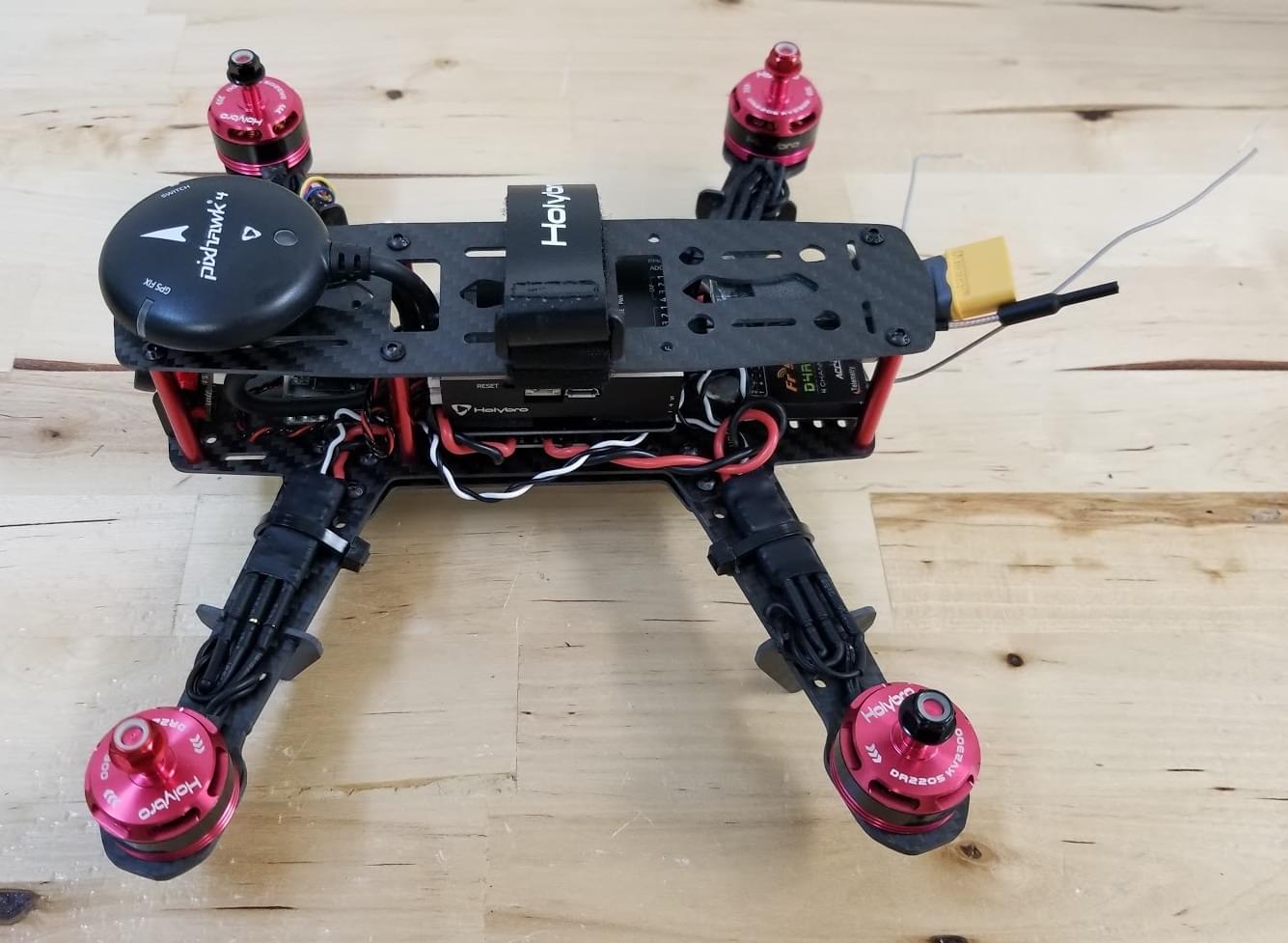
На наведеному нижче зображенні показані як рама, так і електронні компоненти.

Монтаж
Очікуваний час для складання каркасу - 2 години, а для встановлення автопілоту та налаштування конструкції повітряного каркасу в QGroundControl - 1,5 години.
Необхідні інструменти
Наступні інструменти використовуються у цій збірці:
- Викрутка з шестигранником 2,0 мм
- Хрестоподібна викрутка 3 мм
- Кусачки
- Прецизійний пінцет

Збірка рами
Прикріпіть руки до плати кнопки за допомогою гвинтів довжиною 15 мм, як показано:

Покладіть коротку пластину над руками

Покладіть гайки на відносно 15 мм гвинти (показано в наступному кроці)
Вставте пластикові гвинти в показані отвори (зверніть увагу, що ця частина рами звернена донизу, коли транспортний засіб буде готовий).
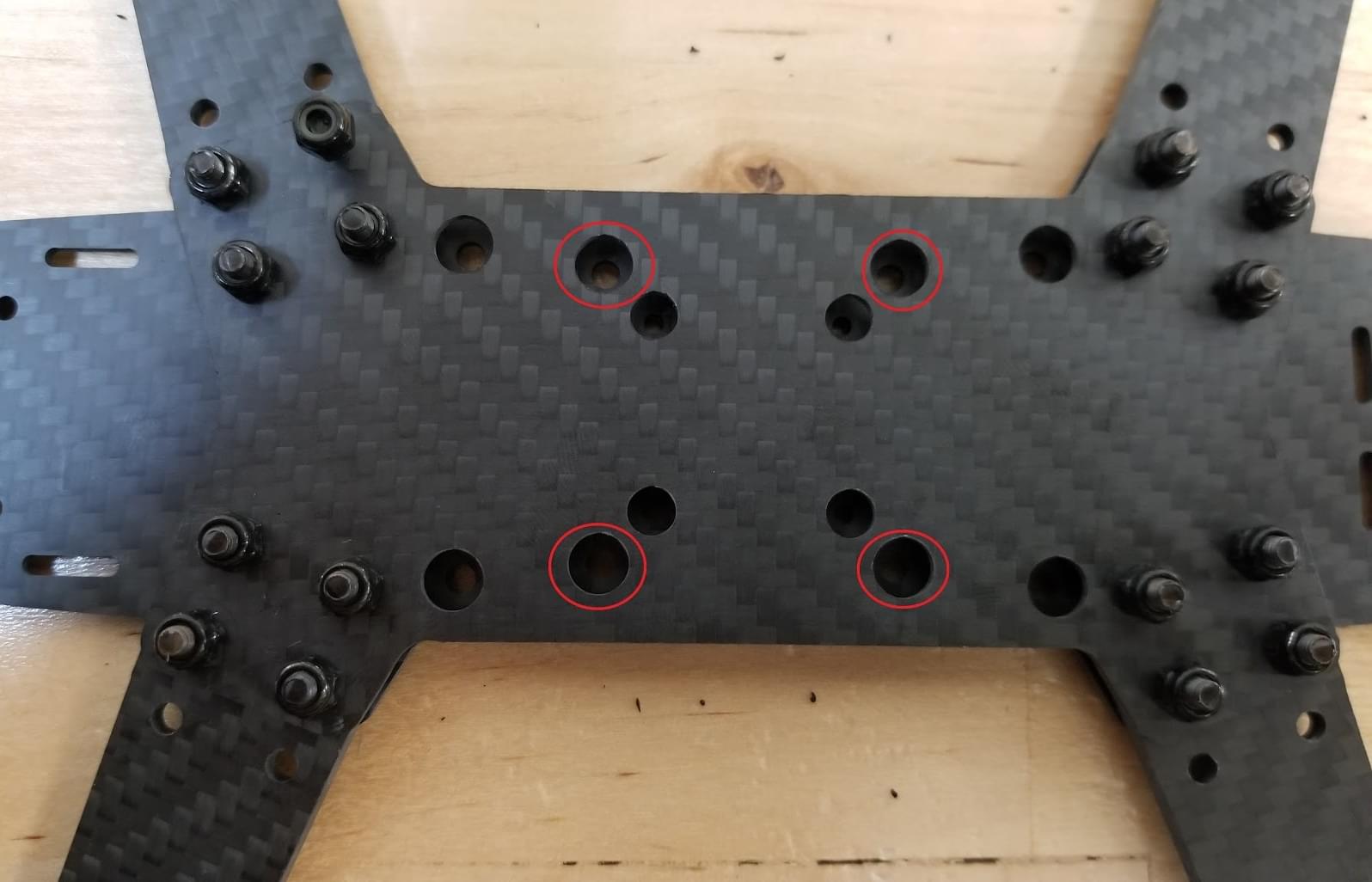
Додайте пластикові гайки на гвинти (переверніть, як показано)

Опустіть модуль живлення над пластиковими гвинтами, а потім додайте пластикові опори
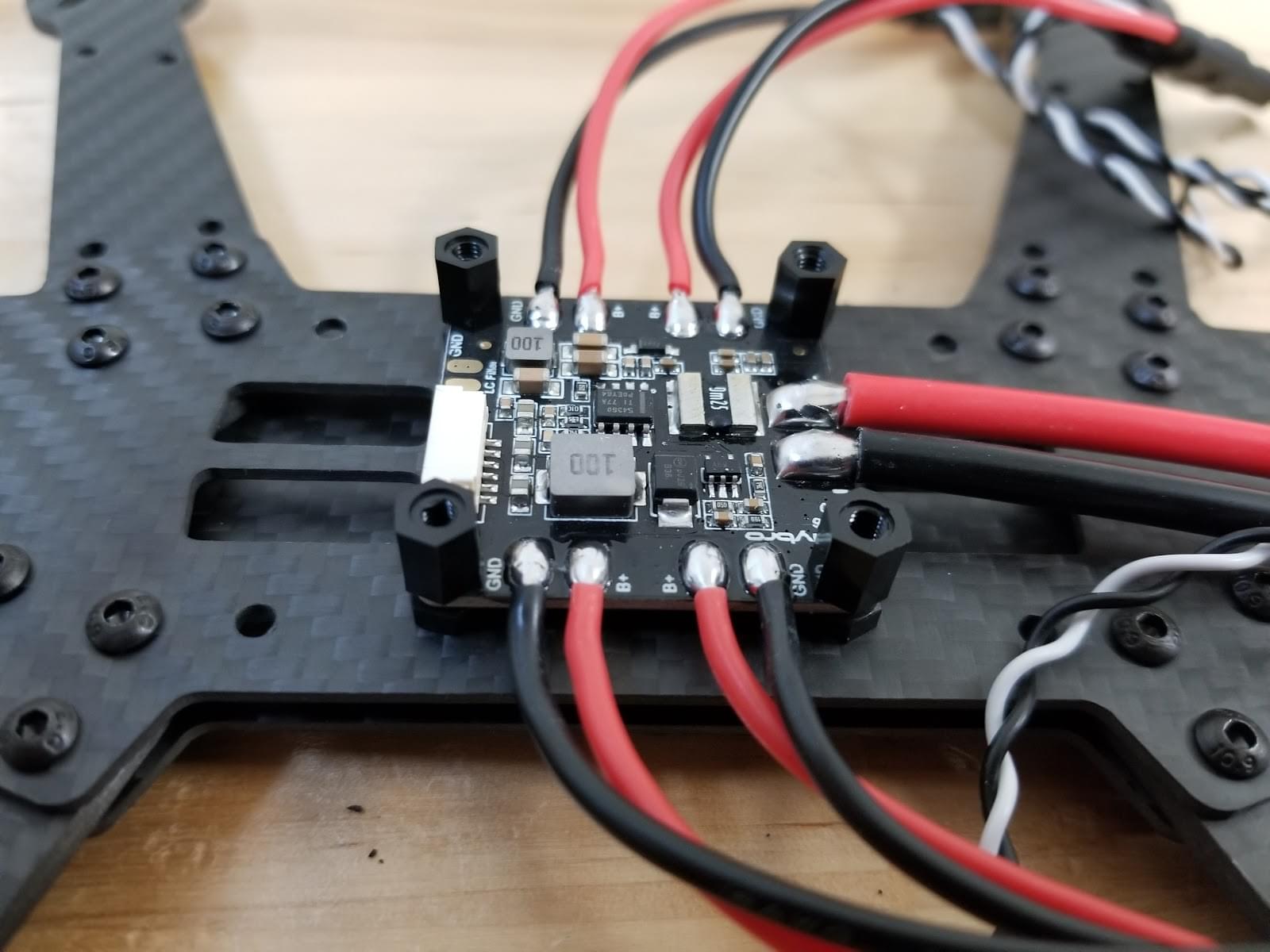
Встановіть плату керування польотом на стойки (над модулем живлення)
Підключіть двигуни. Двигуни мають стрілку, що показує напрямок обертання.
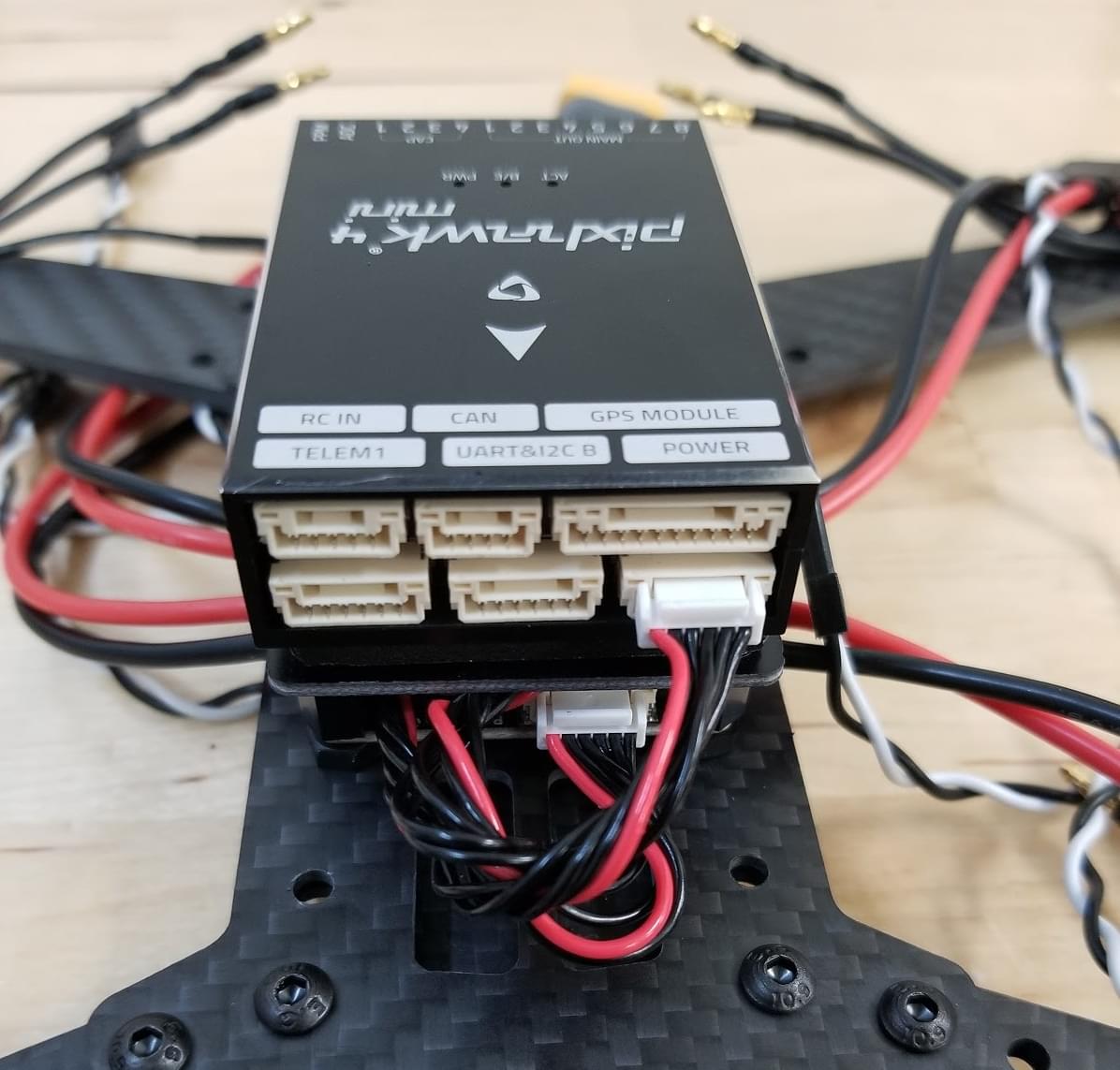
Використовуйте двосторонній скотч з комплекту для кріплення Pixhawk 4 Mini до пластини керування польотом.

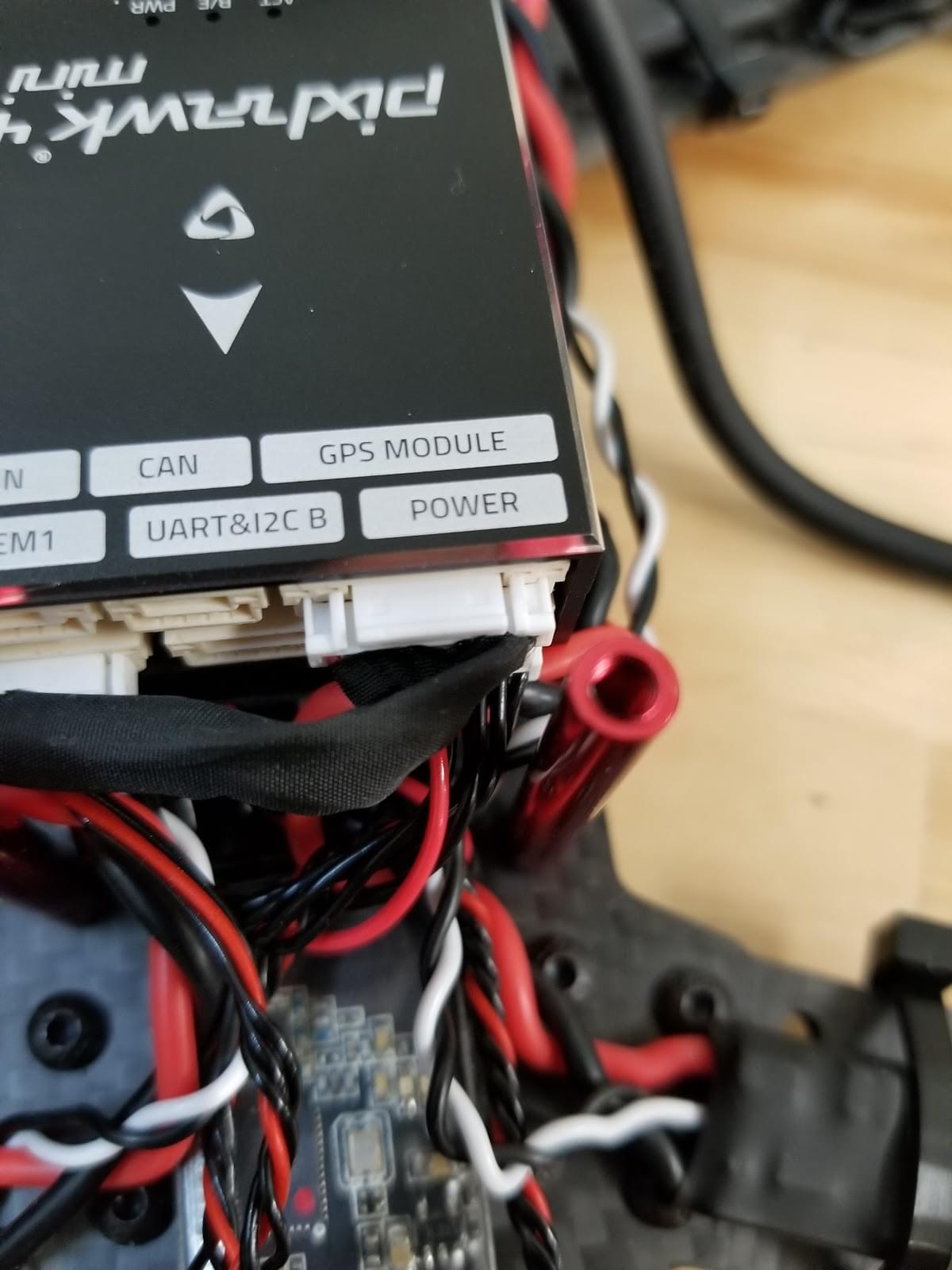
Підключіть кабель живлення модуля живлення до Pixhawk 4 mini.
Прикріпіть алюмінієві опори до платформи кнопок

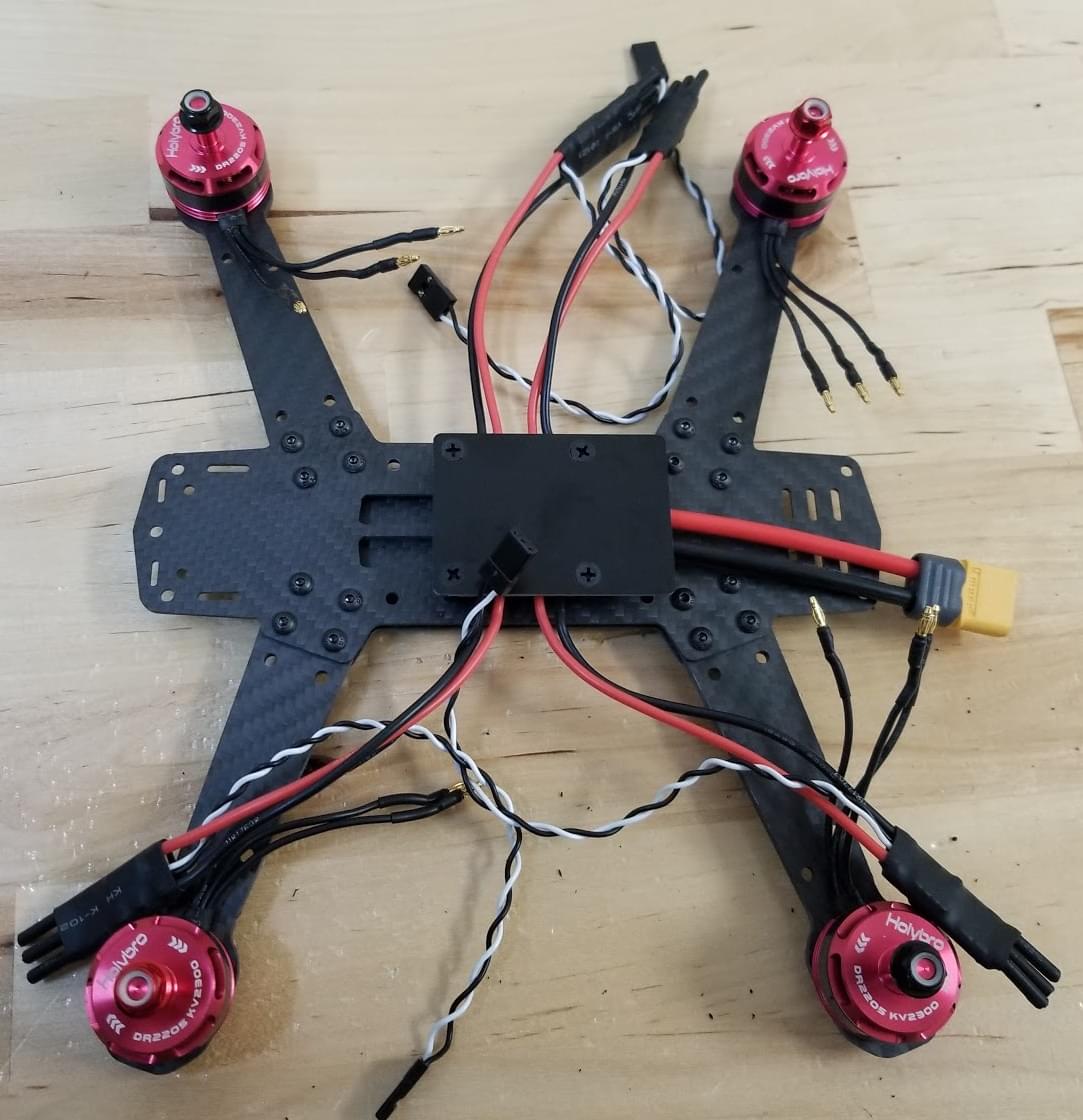
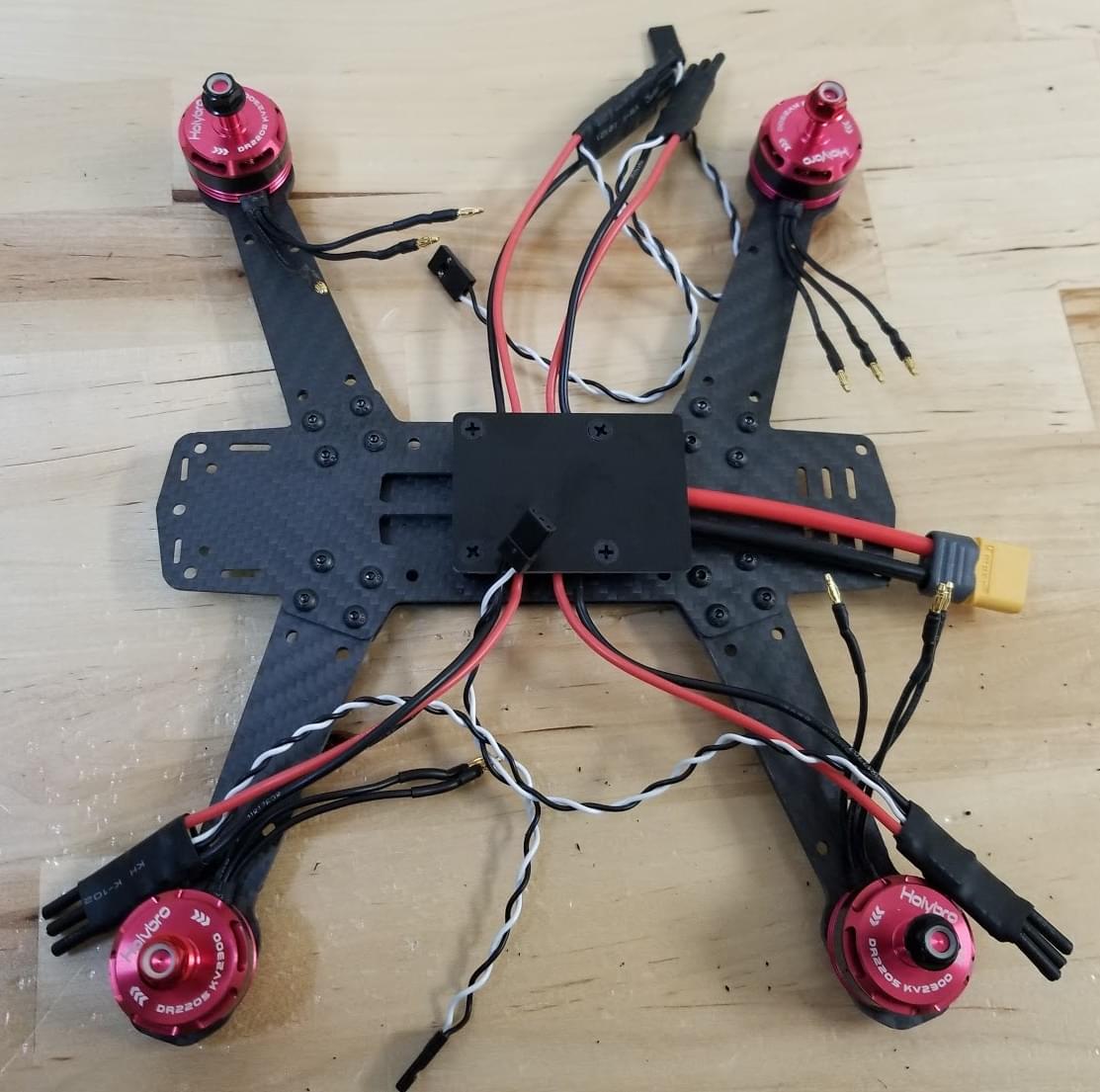
Підключіть ESC з моторами та утримуйте. На цьому зображенні показаний порядок розташування двигунів та напрямок обертання.
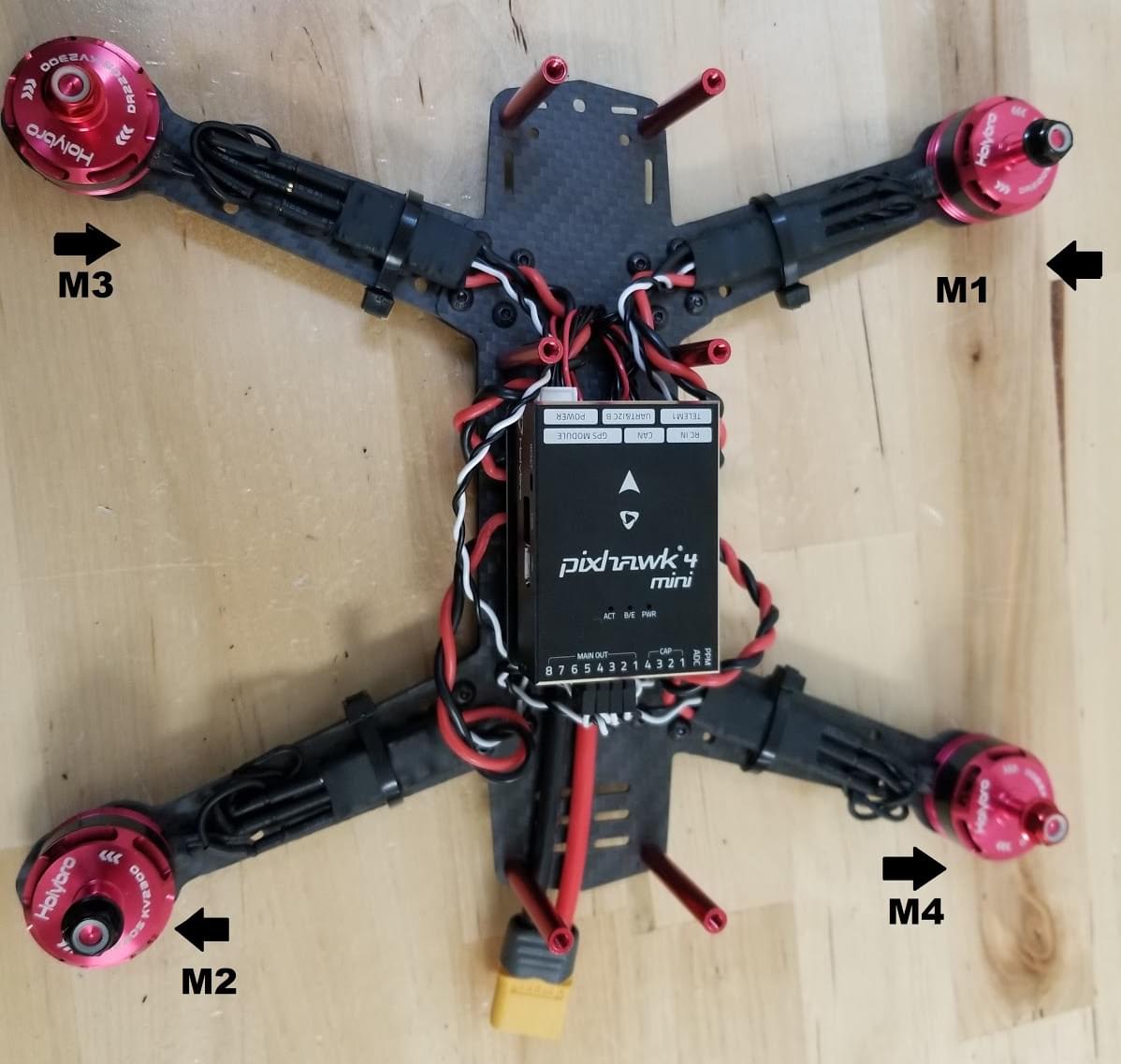
Підключіть двигуни на ESC, переконайтеся, що двигуни обертаються у правильному напрямку, якщо двигун обертається у протилежний бік, змініть кабель A на плату C та C на плату A ESC.
WARNING
Перевірте напрямки руху моторів без гвинтів. :::

Підключіть кабелі сигналу ESC до виходів PWM Pixhawk у правильному порядку (див. попереднє зображення)

Підключіть приймач.
Якщо використовуєте приймач PPM, підключіть його до порту PPM.

Якщо використовується приймач SBUS, підключіть його до порту RC IN
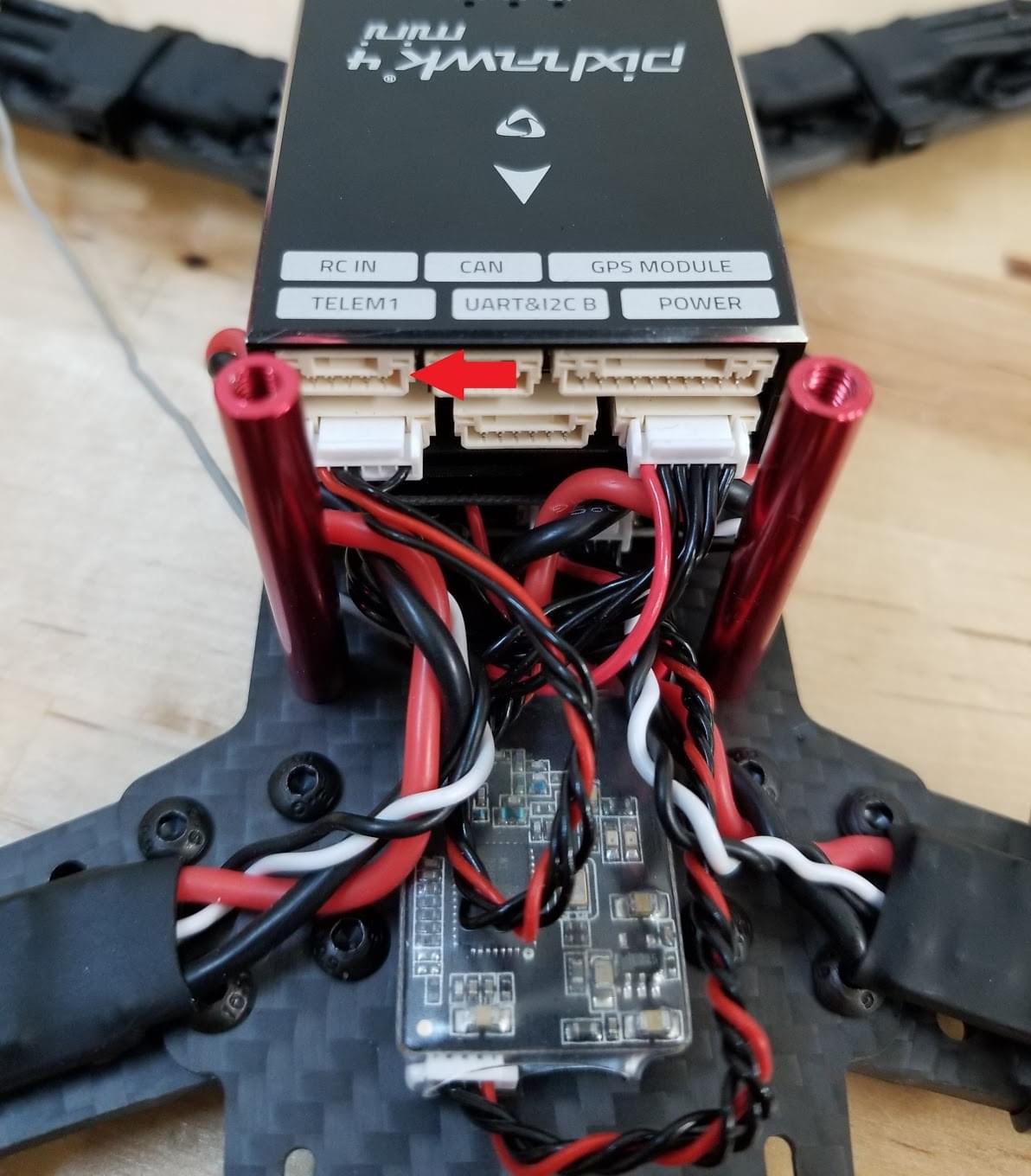
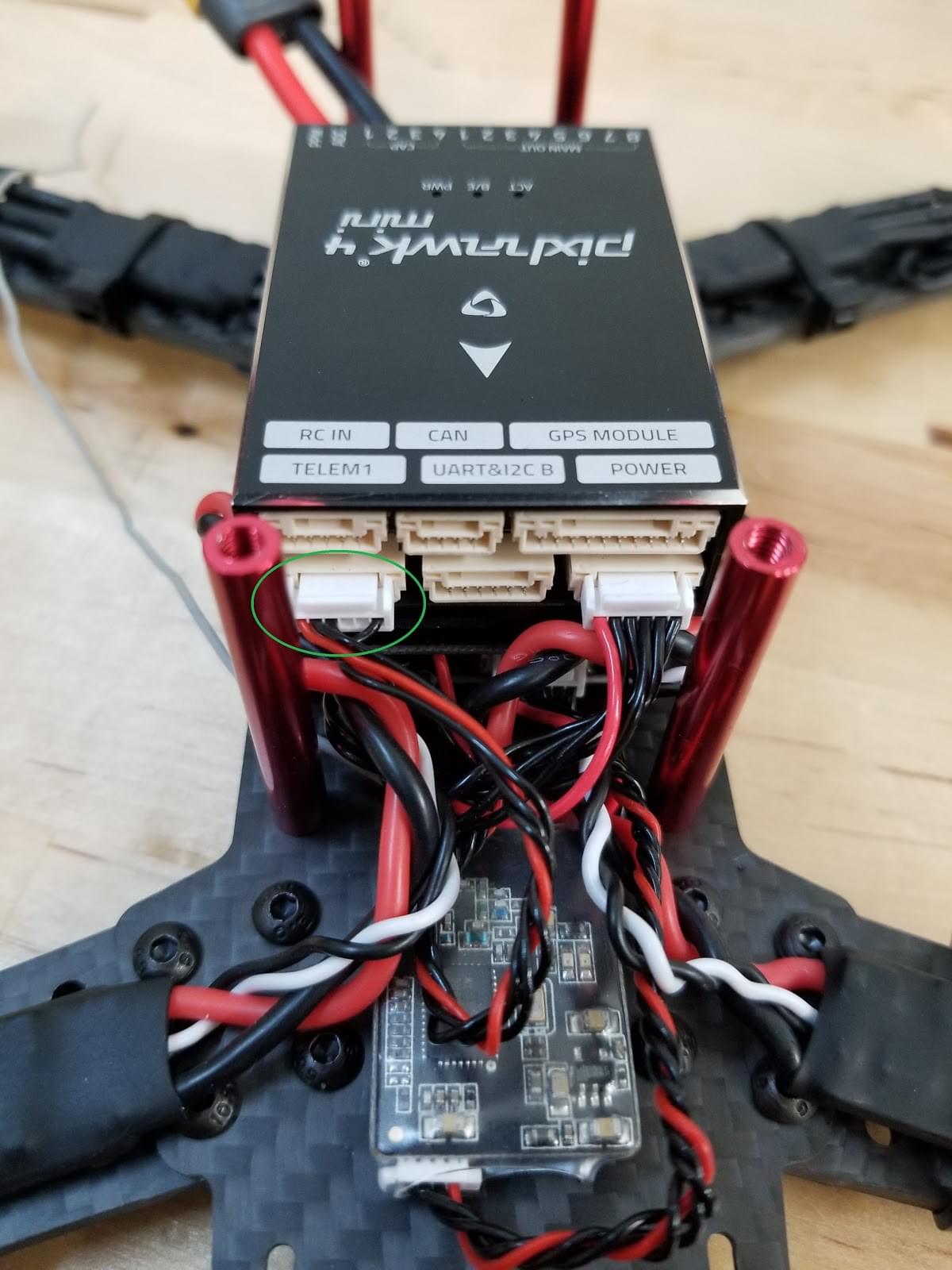
Підключіть модуль телеметрії. Вставте модуль за допомогою двостворчастої стрічки та підключіть його до порту телеметрії.
Підключіть модуль GPS
Прикріпіть модуль на верхню плату (використовуючи наданий стрічку 3M, або пастою). Потім покладіть верхню плиту на стойки, як показано

Останнім "обов'язковим" кроком зборки є додавання липучки для утримання батареї
"Базова" конструкція рами тепер завершена (хоча, якщо вам потрібна, ви можете знайти більше інформації про підключення компонентів у Швидкі початкові вказівки з підключення Pixhawk 4).
Якщо у вас є "базова" версія комплекту, ви можете перейти безпосередньо до інструкцій з того, як встановити/налаштувати PX4.
Збирання FPV
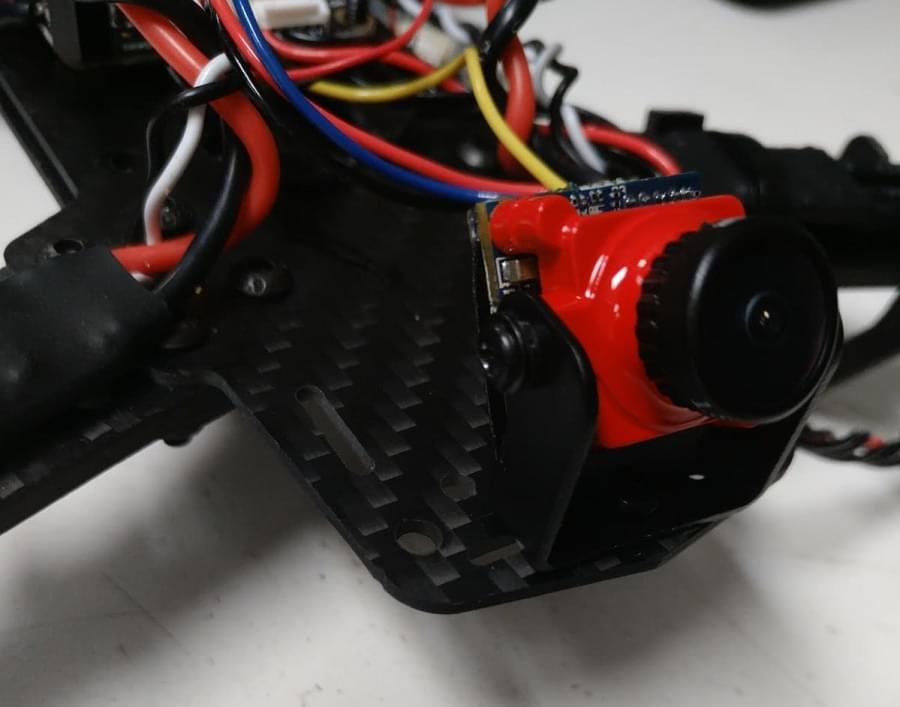
"Complete" версія комплекту додатково поставляється з системою FPV, яка встановлена на передній частині транспортного засобу, як показано.

Кроки для встановлення комплекту:
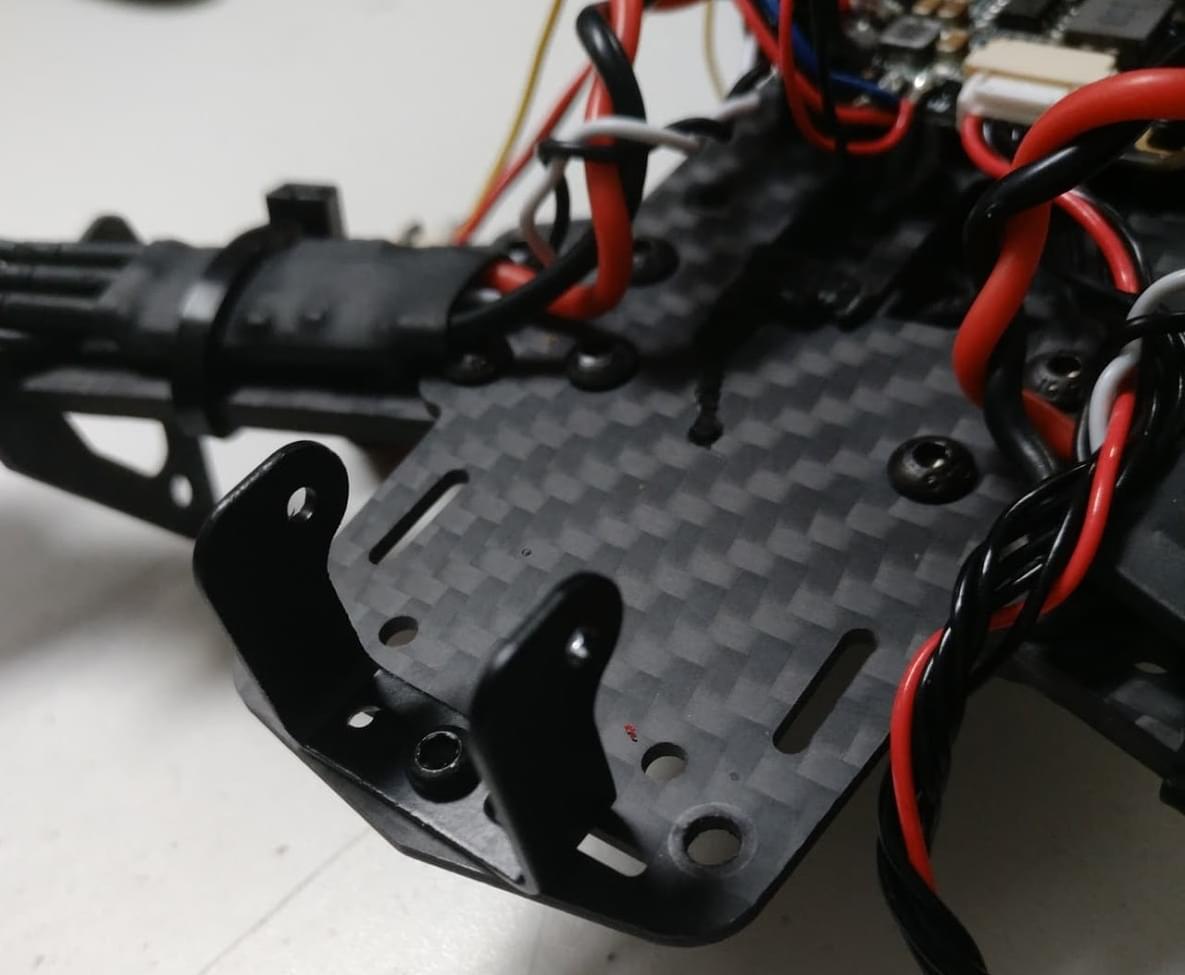
- Встановіть кріплення камери на раму
- Встановіть камеру на кріплення
- Модуль живлення на комплекті має проводку, готову для підключення відеопередавача та камери:
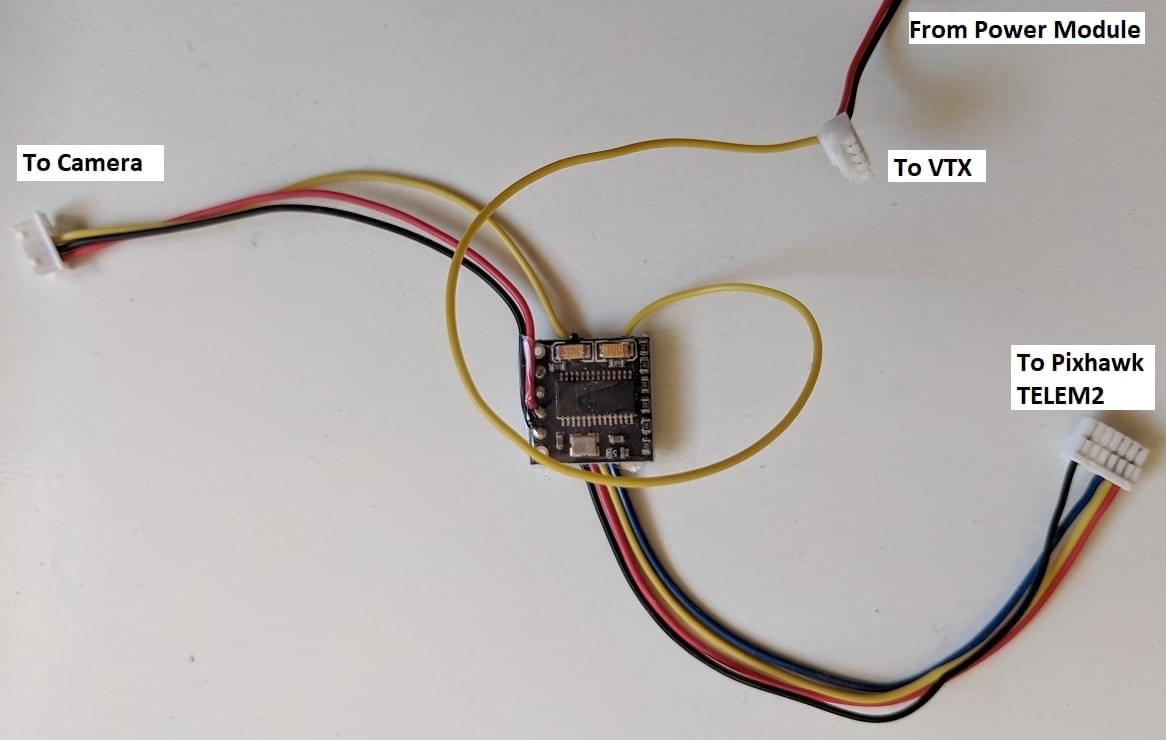
- Прикріпіть роз'єм камери
 Проводи: синій=вольтажний датчик, жовтий=відеовихід, чорний=земля, червоний=+вольтаж.
Проводи: синій=вольтажний датчик, жовтий=відеовихід, чорний=земля, червоний=+вольтаж. - Підключіть роз'єм відеопередавача (VTX)
 Жили: жовтий = відео вихід, чорний = земля, червоний = напруга.
Жили: жовтий = відео вихід, чорний = земля, червоний = напруга.
- Прикріпіть роз'єм камери
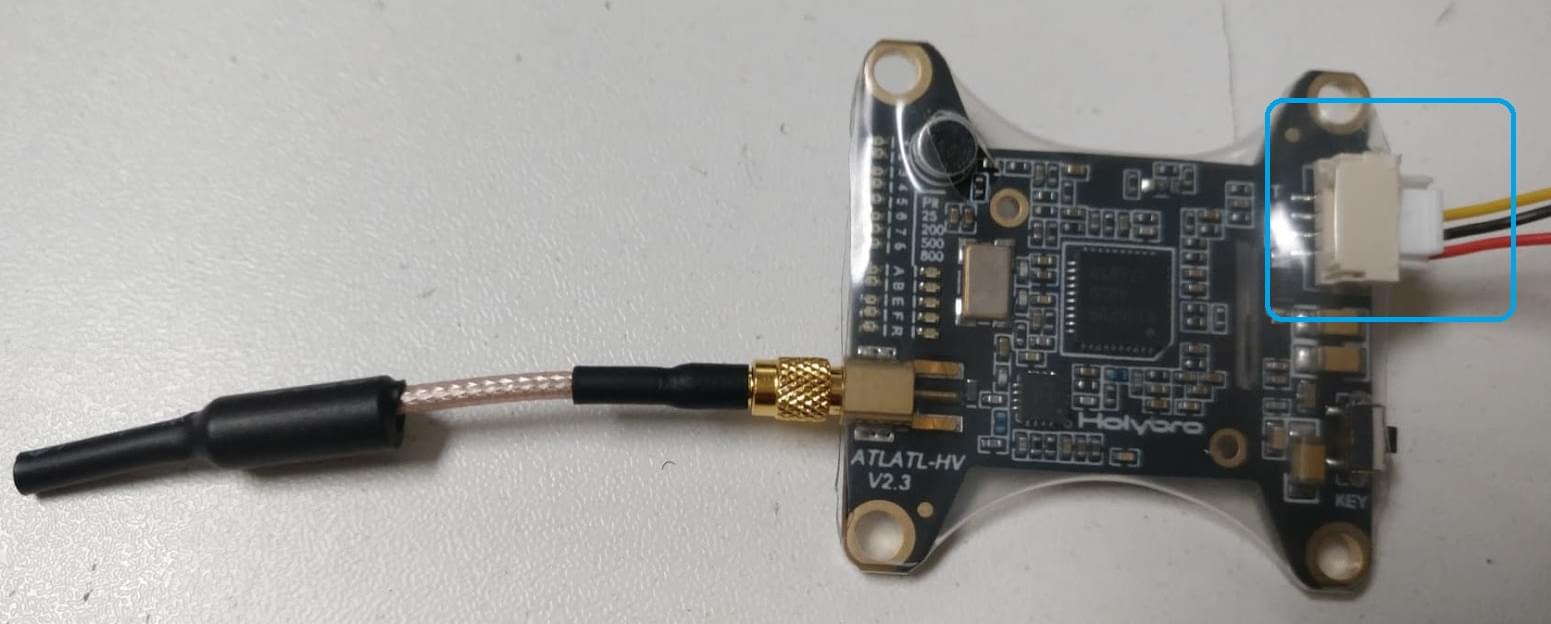
- Закріпіть відеопередавач і плату OSD на рамку за допомогою стрічки.
Якщо вам потрібно підключити систему самостійно, на діаграмі нижче показані всі з'єднання між камерою, VTX та модулем живлення: 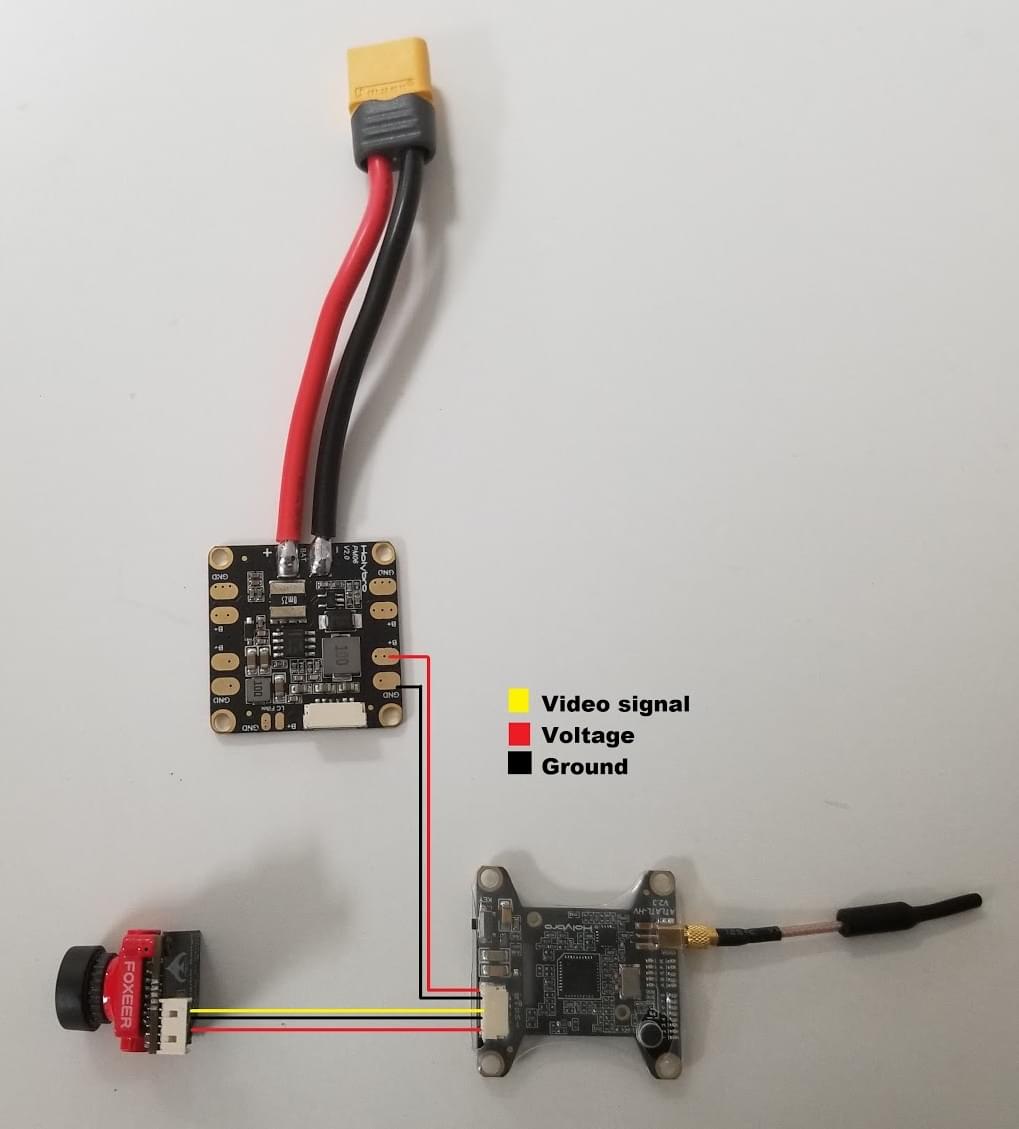
Налаштування PX4
QGroundControl використовується для встановлення автопілота PX4 та його налаштування / налаштування для рами QAV250. Завантажте та встановіть QGroundControl для вашої платформи.
TIP
Повні інструкції щодо встановлення та налаштування PX4 можна знайти в Основна конфігурація.
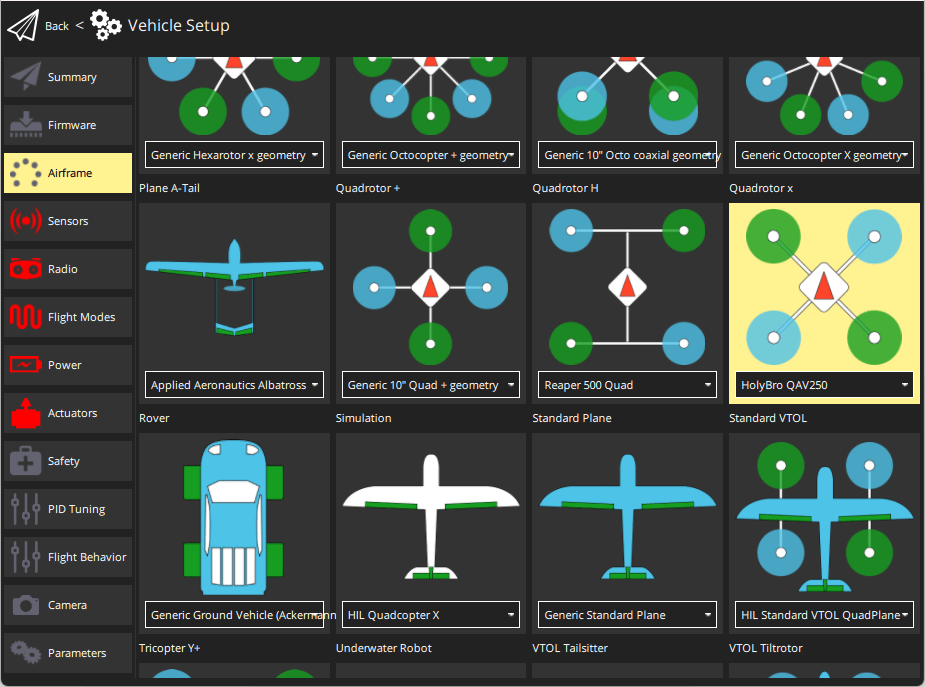
Спочатку оновіть прошивку, конструкцію та відображення приводів:
:::
- Приводи
- Вам не потрібно оновлювати геометрію транспортного засобу (оскільки це попередньо налаштована конструкція повітряного каркасу).
- Призначте функції приводу до виходів, щоб відповідати вашому підключенню.
- Для Pixhawk 4 Mini та інших контролерів, які не мають плати вводу/виводу (I/O board), вам потрібно призначити приводи до виходів на вкладці
PWM AUXна екрані конфігурації. - Pix32 v6 має плату введення/виведення, щоб ви могли призначити його до AUX або MAIN.
- Для Pixhawk 4 Mini та інших контролерів, які не мають плати вводу/виводу (I/O board), вам потрібно призначити приводи до виходів на вкладці
- Перевірте конфігурацію, використовуючи слайдери.
Потім виконайте обов'язкове налаштування / калібрування:
В ідеалі ви також повинні зробити:
Вдосконалення
Набори вибору конструкції встановлюють параметри автопілота за замовчуванням для рами. Ці можуть бути достатньо хороші для польоту, але вам слід налаштувати кожну конструкцію рами.
Для інструкцій щодо того, як розпочати, почніть з Автоналаштування.
Подяки
Цей журнал збірки був наданий Командою тестового польоту PX4.